
CHIRPing bottom all the way to Bermuda, maybe fish too!
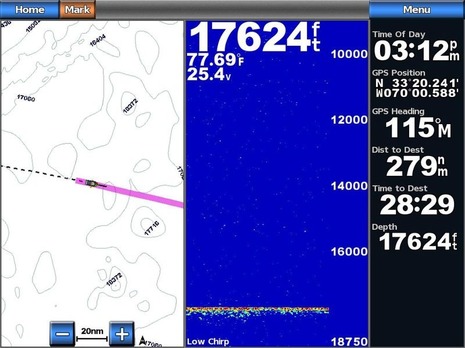
It’s a rare day when someone calls to say he’s sending marine electonics screenshots that gave him goosebumps! The someone was Peter Braffitt of Gemeco Marine and Airmar Technology, and while he certainly has a business interest in high-performance sonar transducers, he’s also a straight shooter. Besides, isn’t that screen above pretty darn amazing? It was taken aboard the handsome 80-foot Merritt-built sport fishing boat Speculator en route from Beaufort, North Carolina, to Bermuda. They not only held bottom the whole way — even in 17,624 freakin feet of water (or 5,372 meters or 3.3 miles)! — but they may have spotted fish at great depths too…
Garmin posted a blog about the Bermuda trip yesterday and it’s quite an interesting read. The writer — who is a Garmin sonar engineer, I think — describes their excitement as they realized they could easily break their former record of 11,720 feet and they were headed toward depths far greater, as I was able to model nicely using Nobeltec Trident TZ below…

And, sure enough, they were not only holding bottom at the deepest part of their trip, but they only had the gain at 65%, or as the engineer wrote “No sweat and with many dB of signal to spare…” I know that other CHIRP sonars are seeing deep but I think this super deep performance may be due to the extra horsepower Garmin has built into its GSD 26 (like those “25-3,000 W rms”)…

Of course the transducer has a lot to do with realized power and performance too, and in this case it was an Airmar CM599LH which was “custom installed into a sleek keel pocket that was fabricated by Bayliss Boatworks” according to Peter Braffit. Apparently the whole project was a joint developement effort by Airmar, Garmin, and Speculator’s captain Ed “Cookie” Murray, though Peter assured me that no prototype hardware or beta software was involved in the results seen on these screens. (I can’t find much detail about Speculator, but check out Merritt’s Boat & Engine Works for more about these remarkable fishing machines.)

It seems quite likely that these screens will get a lot of attention from the highline fishermen competing in events like the Bermuda Triple Crown. There’s a general notion — which I pretty much buy — that a fishfinder that can see well deep can also see really well in shallower conditions. For instance, I’ve seen both the GSD 26 and Simrad’s BSM-2 resolve high detail of wrecks and fish just off Miami (and I saw similar with a Raymarine CP450C at last winter’s shows). But how much detail can they see deep? Specifically, how far down can you see fish? Simrad likes to show off a CHIRP screen of a swordfish chasing squid at almost 2,000 feet deep off Mexico — purportedly verified by catching the fish! But could those be fish clustered over a sea mount at about 16,000 feet deep in that Speculator screen below? I’m not sure, and given that Garmin didn’t mention it in their blog entry, maybe they’re not sure either. What do you think?
Either way, though, Garmin and Airmar (who are also working together on the “tunny” expedition in Scotland) deserve congratulations for breaking new ground in sonar performance. Or as Braffit wrote me “I can’t help but think that we have just witnessed a new chapter in fishfinding technology.”










Ben, I’m betting it isn’t a fish, although I would like to think so. Given the cone width at that depth, and the apparent scale of the structure/fish it would have to be huge. That being said, the Kraken has to live somewhere.
Interesting comment about that last screen shot from a friend:
“I don’t know— I’d venture at that scale you’d see bottom features but it would be tough to see fish—if fish were even to school at 11,000 feet.
It pretty dark down there, and only the occasional blind copepod or annelid to dine upon.
I’d say what we are seeing is a piece of bottom geography.
This {bit from the Garmin blog} indicated to me that detail may be lacking, though its a good example of reading the bottom , useful perhaps more for bathy data than creatures.
“”Keep in mind that at these depths, the ping rate is very slow – limited to the speed of sound in water – this screen image represents over 2 hours of time and about 24 miles of bottom.””
This is a huge area in which to attempt to see a fish. Even a 10 foot fish—let see:
24 miles= 126,720 feet
15-inch screen is 1,024 pixels wide.
126,720 feet of travel / 1024 pixels = 124 horizontal feet represented by each pixel.
Seems you’d have to have a fish at least 124 feet long to register as a pixel
Does this make sense?”
Maybe its a sunken ship
That’s pretty amazing to keep a bottom lock that deep!!! I’m curious if they took some screen shots of the mystery echo in the last imaged with the plotter “zoomed in” on the bottom range, because your math makes sense. Here’s some other math that I’ve been pondering:
The R599 Low-Chrip’s beam is 9 degrees, so by my trigonometry:
2 * 16787 * (tan 4.5) =
2 * 16787 * 0.0787017068 =
2 * 1,321.16555 =
2,642.3311 ft
At the seabed, the beam is now about 2,642 ft wide!! So even a small fish may return quite large on the screen anyway.
I’d be curious to see what the sonar’s inherent resolution is at that range, independent of the display’s resolution.
Thanks, Aaron. This is becoming a good lesson in how sonar “sees”. I’ve always liked how the “A” Scope on Raymarine sounders shows the cone diameter of the bottom seen (if it knows the specifics of the transducer). In other words, it (and maybe other fishfinders?) does the trig you just did.
You can sort of see what I’m talking about in this five year old Panbo entry: http://goo.gl/VO6YO
Which also speaks to how far the technology and particularly Garmin’s has come.
But WHY does one need a sonar with that kind of capability? And at WHAT COST to the environment?
What frequency does this thing operate at? Have any studies been done, or marine biology experts been consulted, to ensure that the marine life down there aren’t under threat from all that sonar banging?
How would you like to have some kid banging on a trash can lid whenever they pass by, day or night?
This device must be a very high power transducer, which means LOUD. And if it operates in or near the audio range that sensitive marine life depend on for their existence it shouldn’t be produced. In fact, I wish my relatively puny Raymarine depth sounder had a ‘transducer disable’ offering on its menu so that I could disable my transmissions (without disabling my other instrumentation) when I am in the vicinity of whales here in the Pacific Northwest.
Raymarine echosounders have a ping enable/disable which turns the transmitter off.
Larry, it is an important question, but in this case the frequencies used don’t bother fish or whales. Whales communicate at around 300 HZ. The current Chirp fish finders operate from 28kHZ to about 210 kHz. The power output is 3000 watts max. Much lower frequency, high powered sonars used for military applications are generally believed to bother some sea life, and especially whales. The Garmin GSD 26 can also disable the ping/chirp, and both system moderate power based on depth.
I sure don’t think we should be abusing sea life, but like Bill I’m not sure that CHIRP sonar will do that. It performance enhancement is mainly derived from more information (frequencies) being put in the water, and lots of signal processing of what comes back, not more power. It just happens that Garmin also puts lots of power in its CHIRP fishfinder and I think it’s the combination that results in such amazing depth performance.
But sonar power is relative, and I doubt that any recreational sonar is exceeding what the commercial, scientific, and military worlds are up to. Years ago when I visited Simrad’s Horten, Norway, sonar facility (now part of Kongsberg Maritime’s Simrad Fisheries division), I saw side scanning transducers more than three feet in diameter that they wouldn’t let me photograph.
On a cruising sailboat in offshore waters, the depth sounder is just another battery drain. I put a relay on the power supply to my Raymarine depth sounder module and ran a line back to a switch on the helm to depower the sounder. A “lost data” alarm sounds when I turn off the sounder, but the alarm quits squawking after a minute. Unless the device is being used as a fishfinder, a sailboat only needs continuous depth info in specific cruising areas like the Bahamas or the Coast of Maine.