
Airmar DST810 Multisensor, really smart

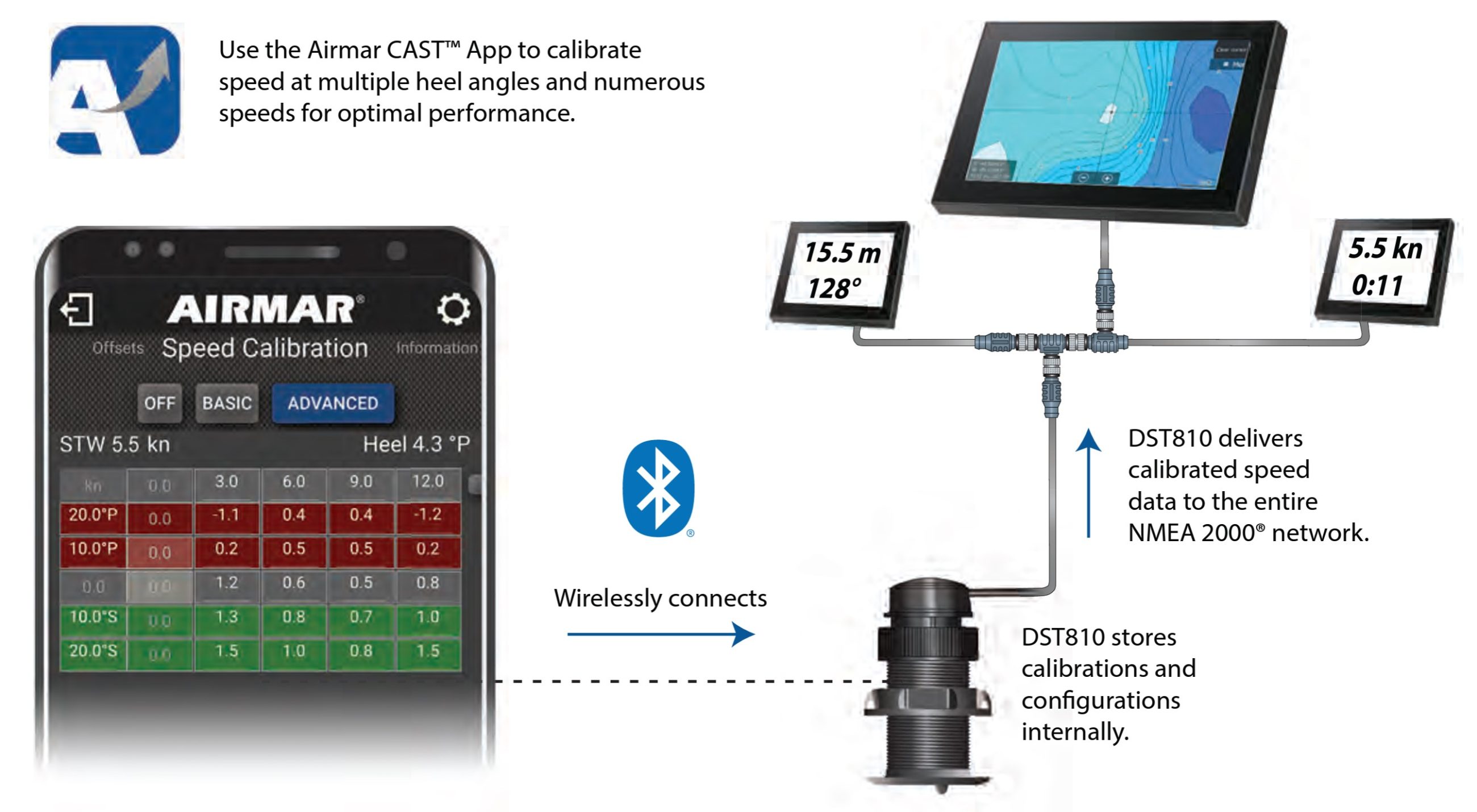
Airmar trail blazed the NMEA 2000 “smart” sensor about fifteen years ago, building a microprocessor right into a transducer so that a single rugged N2K cable can both power the sensor and deliver Depth, Speed, and Water Temperature to almost any display, regardless of brand. And while the company deservedly dominates the world of water-related smart sensors today, they were a tad slow to adopt the now-common technique of including a Bluetooth app for the detailed calibration that many of the display manufacturers fail to provide.
But after initial testing, I think that the relatively new DST810 Smart Multisensor is a thoroughly modern N2K device. The free CAST Bluetooth app works well and offers about every level of calibration possible. So even the most accuracy-obsessed boater can get maximum precision from a DST810, which also has improved raw sensing features compared to its predecessor, and with only a modest cost increase.

DST810 with included valve casing and blanking plug 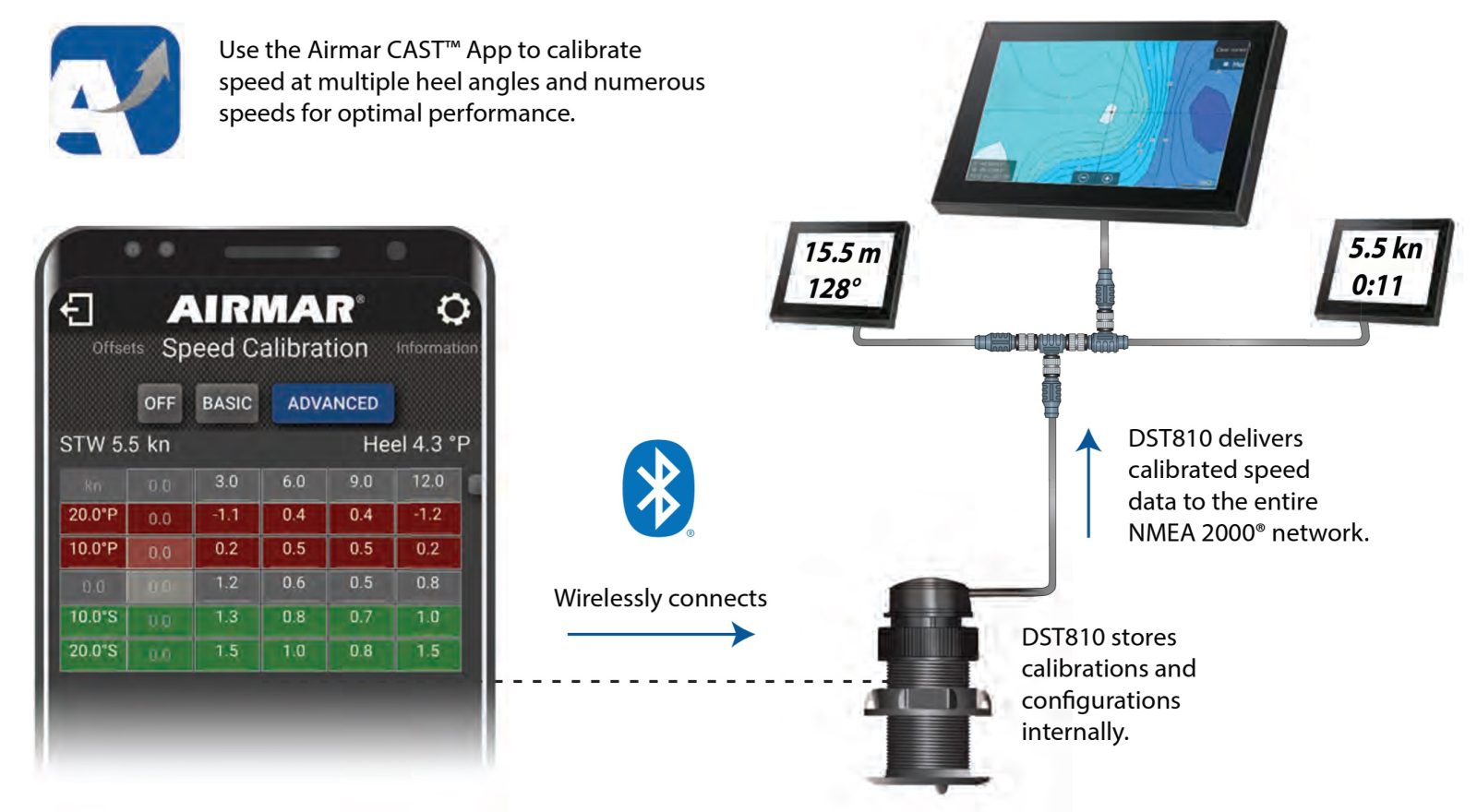
Data output via NMEA 2000, configuration via BlueTooth app

In fact, the DST810 Smart looks just like the venerable DST800 Smart Triducer. Both are typically kitted with a valved casing — also available in bronze or stainless — and a blanking plug (mainly because the paddlewheel has to be kept clean). Both also claim depth performance from 1.6 to 600 feet, absolute water temperature accuracy to about two degrees Fahrenheit (with a much finer change response), and a paddlewheel pulse rate of 5.6 per second per knot.
But while the 800 recalculates its three main senses once per second, the 810 updates STW 5 times per second for “visibly smoother speed-through-water reporting” and adds a Trim/Heel sensor (also known as Pitch/Roll). While that’s all good, the big news is the app that can perfect these values for a specific boat install.

Connecting CAST app to DST810 is easy and secure 
CAST can display DST810 live data 
Trim and Heel now included, plus faster Speed updates (if you actually move)
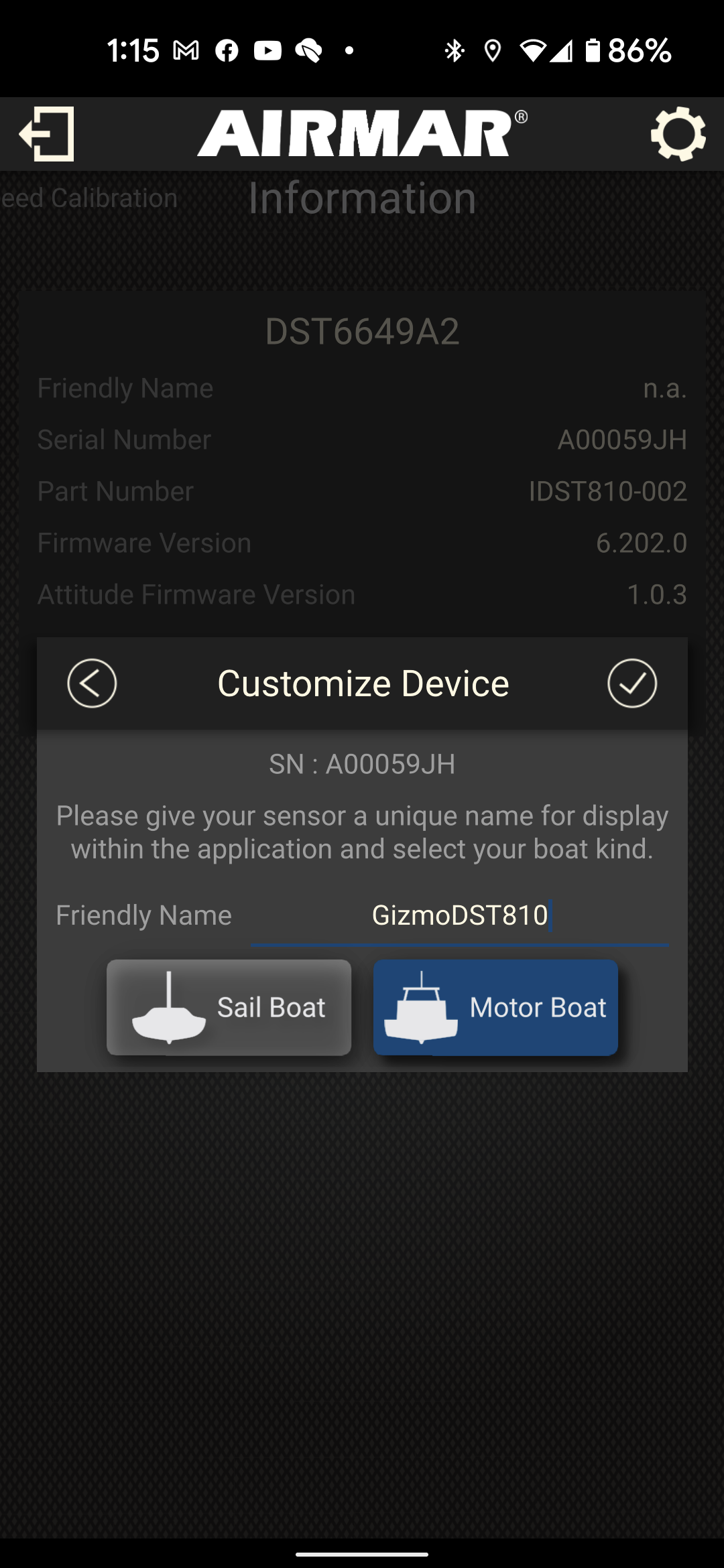


Connecting the Airmar CAST app — either Android or Apple iOS — turned out to be simple and reliable. Like many current Bluetooth Low Energy (BLE) devices, the app itself makes the connection, no messing with the system settings on your phone or tablet. You do need to confirm the DST810 serial number for the initial connection — to avoid transducer confusion in a marina — but after that, it just works. Moreover, as shown upper left, on first connect you can give the 810 a custom name and pick the type of boat icon you want to see on that CAST graphic data display page.
I don’t picture many boaters regularly opening the app to see Depth, Speed, etc., but that is surely the obvious first troubleshooting step if one or more of the DST810 data values stops showing, or acting odd, on a boat’s N2K displays. And, full disclosure, please note the zero knot Speed on my test screen. Although I’ve had the 810 for over a year — and even managed to freeze it solid in a bucket outside my shop, an unintended test it passed with flying colors — I never got big Gizmo underway last season. So consider this DST810 review part one, though I’m already confident that I’ll be able to calibrate it quite well.

N2K PGNs can be turned on/off and refresh speed modified 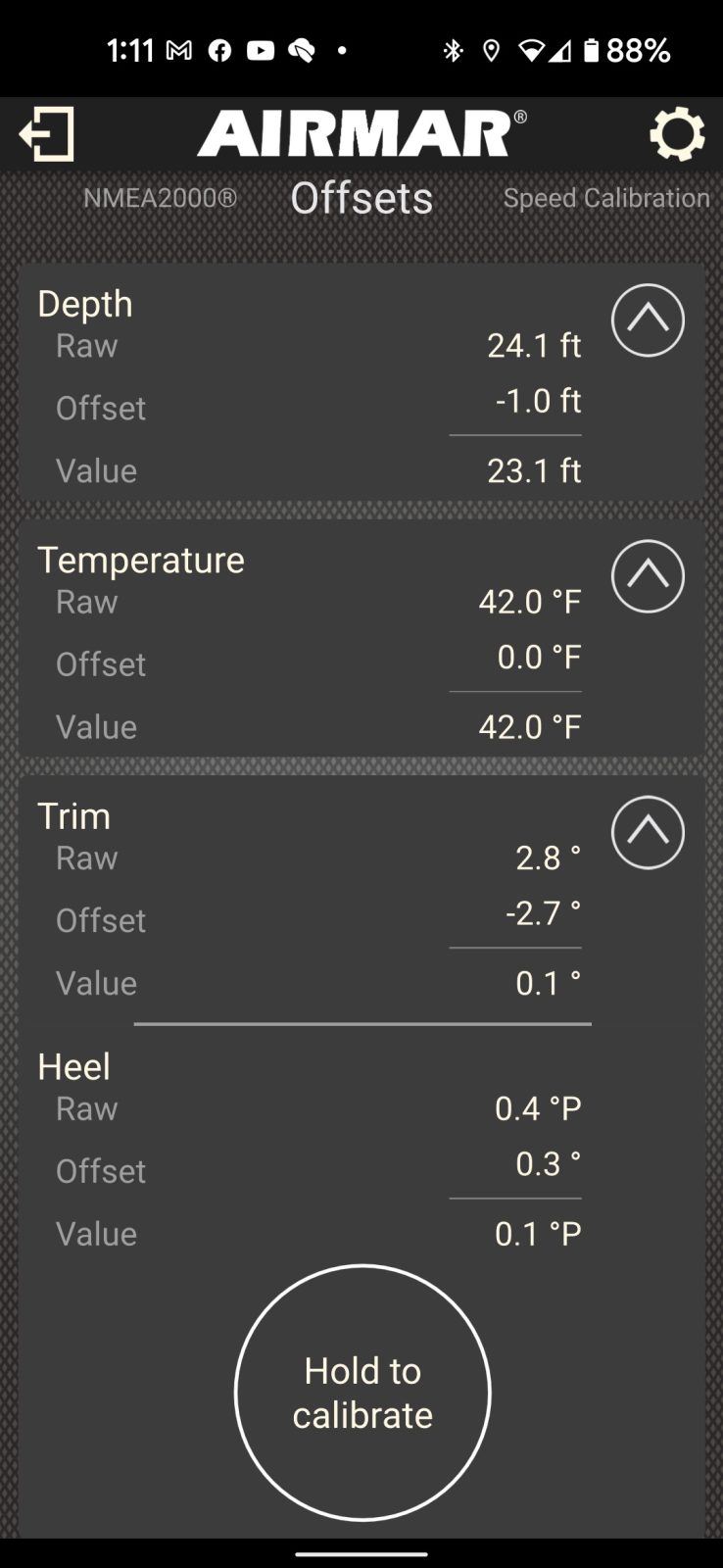
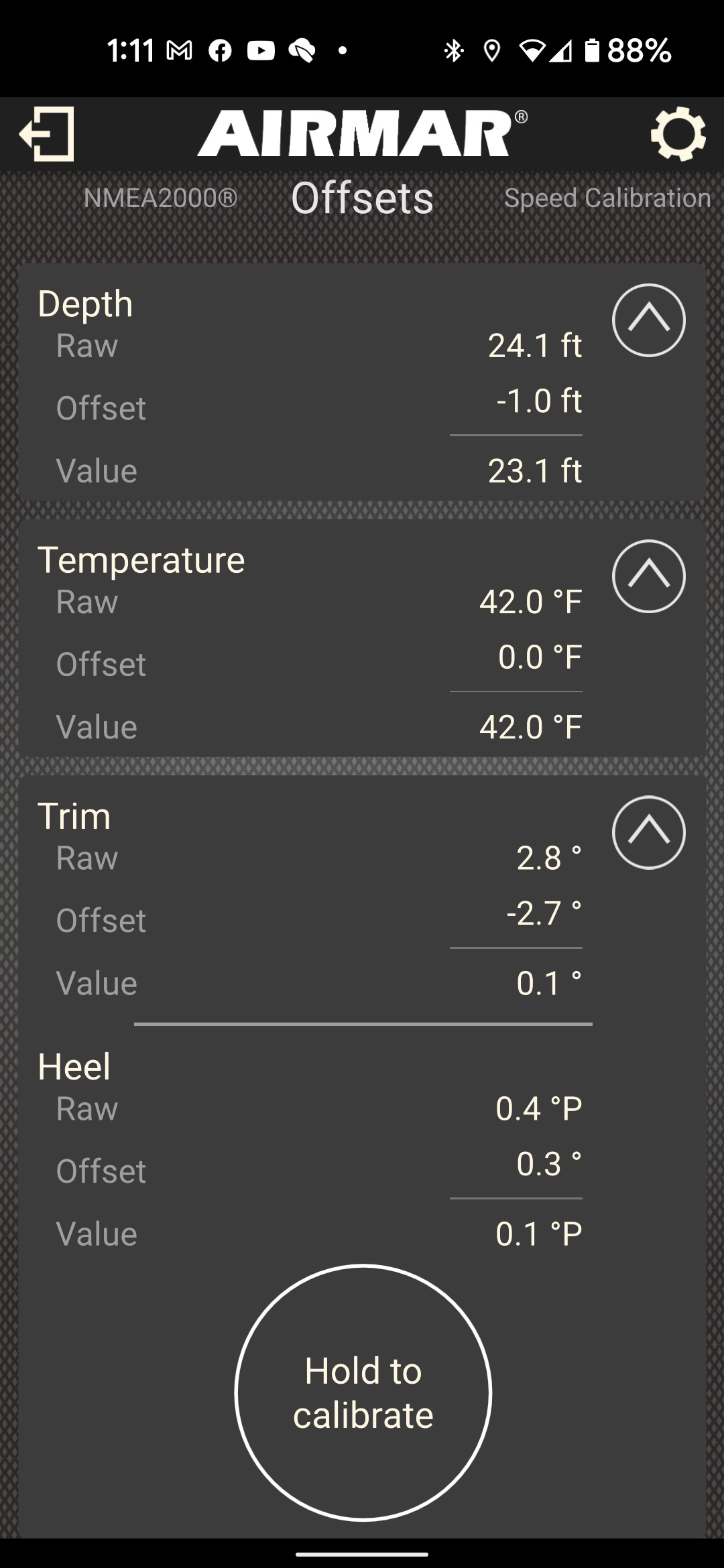
Underlined offsets can be changed, or automatically calculated for Trim and Heel 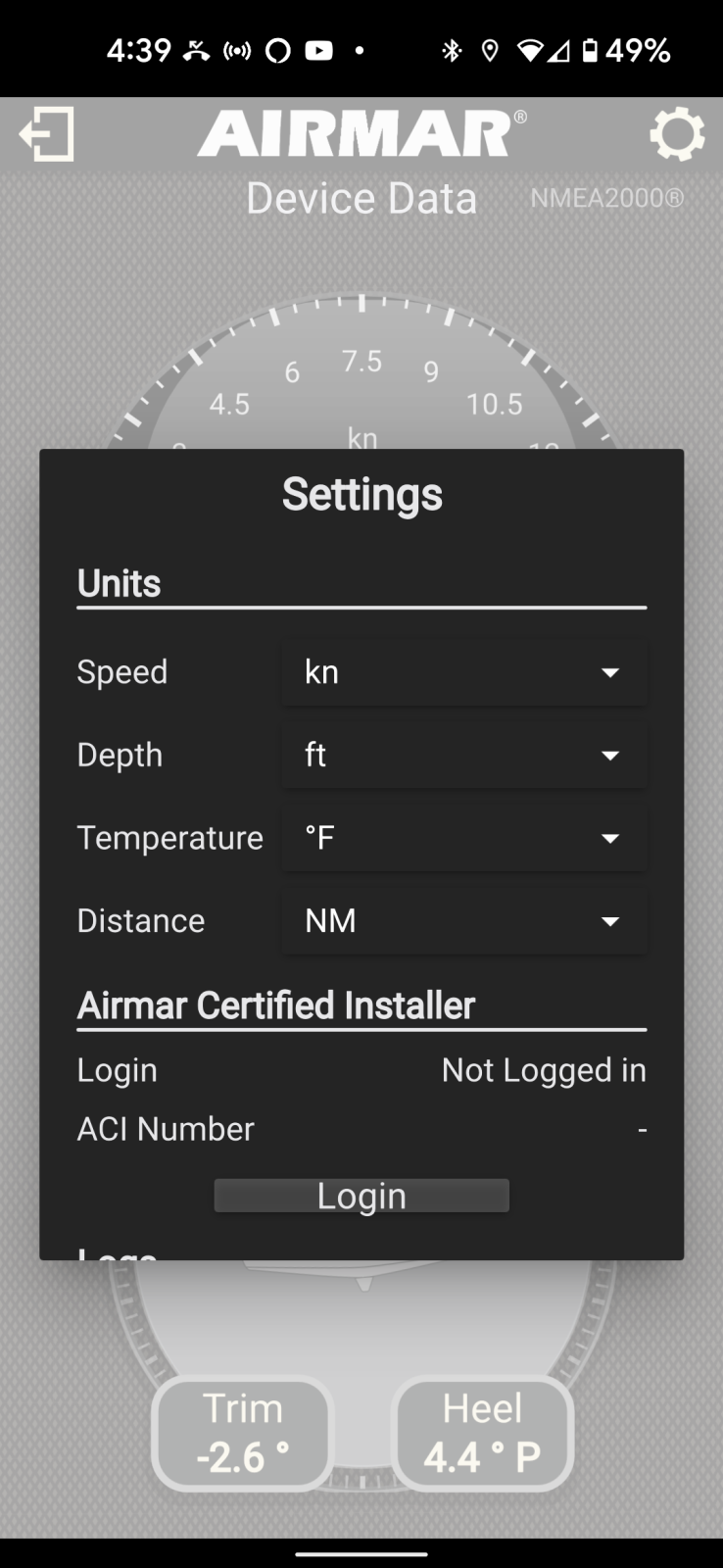
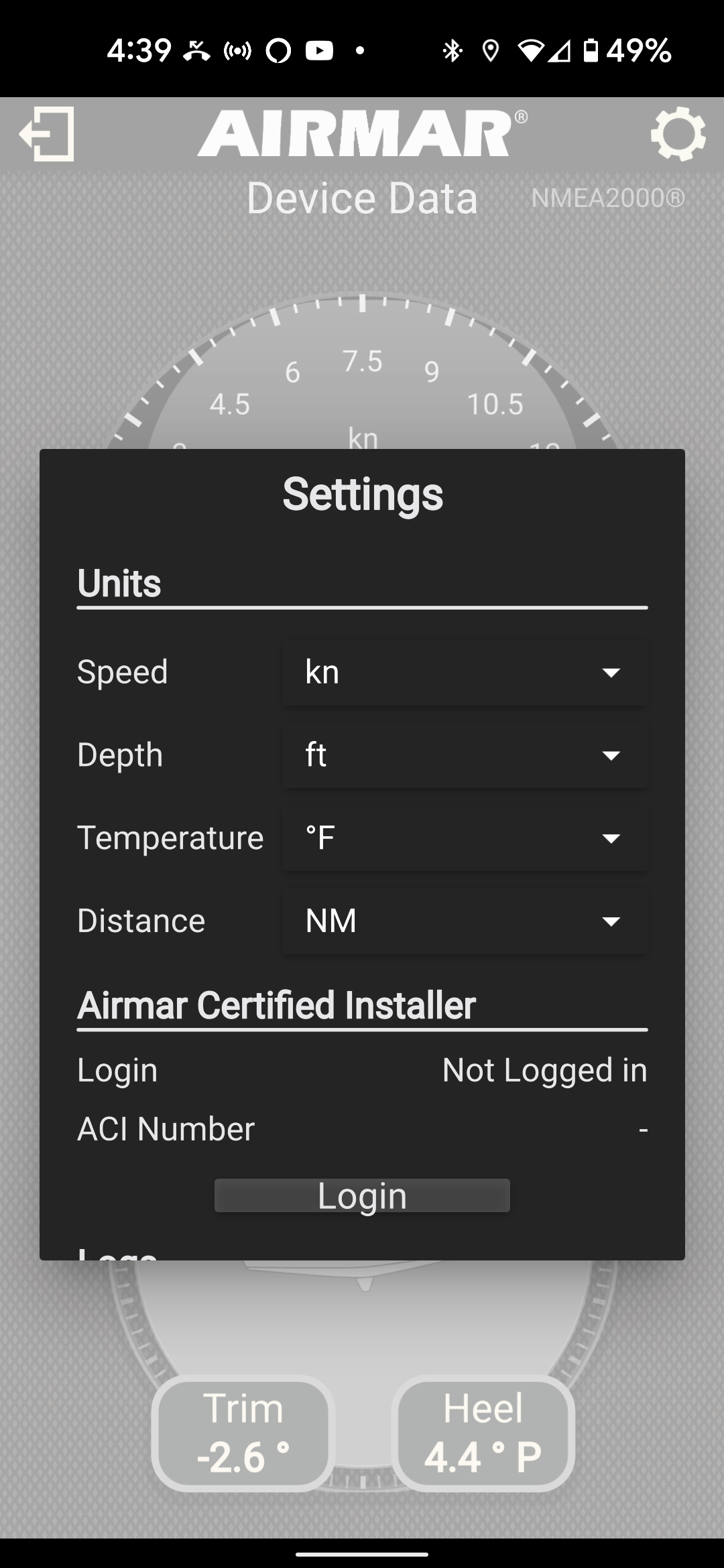
Units settings apply only to the app
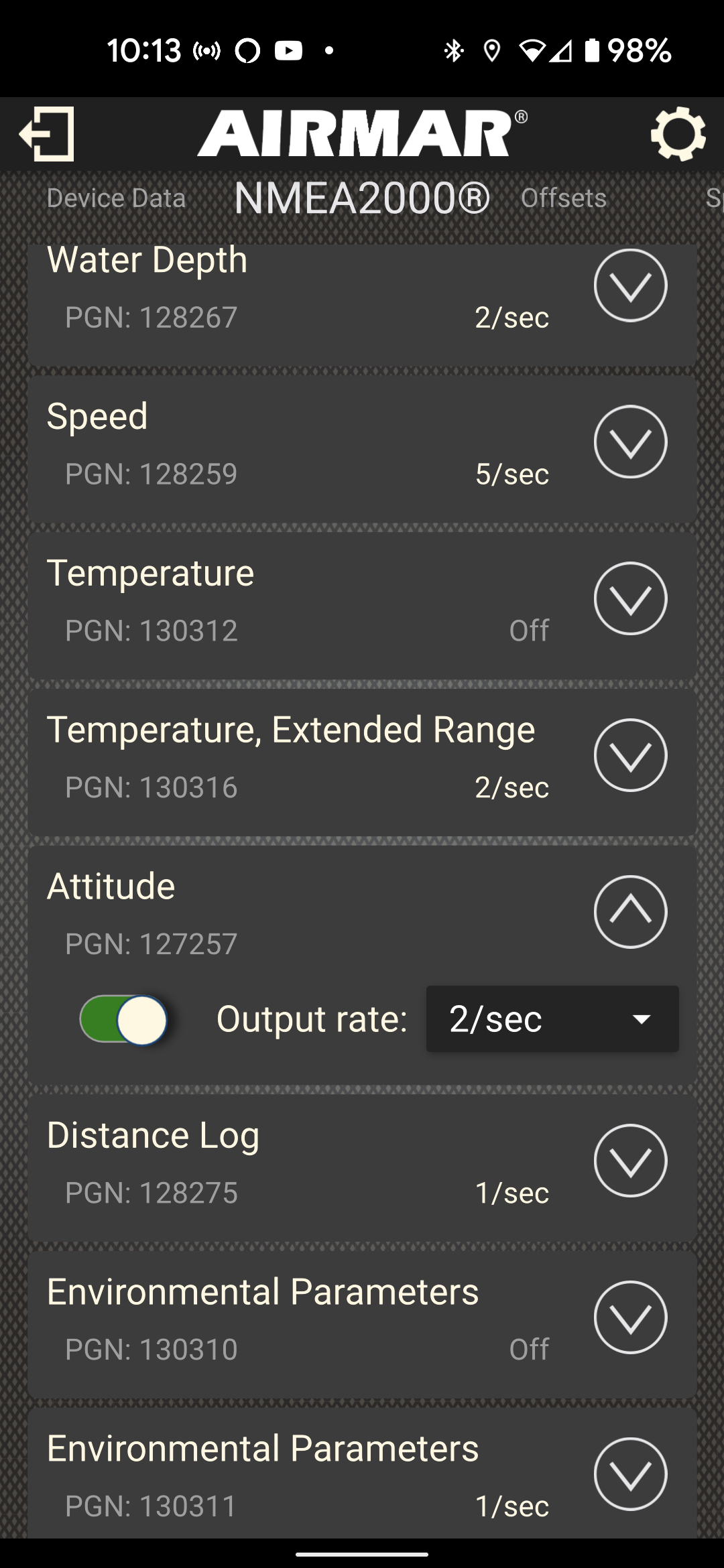
First off, control of an N2K sensor’s individual data PGN (Parameter Group Number) output is a rare feature, but it can be useful. For instance, if the paddlewheel failed beyond calibration or cleaning, I’d rather turn off the output than have badly inaccurate STW showing on my displays and messing with calculations like “Sailors” True Wind, Fuel Economy, and Current Set/Drift.
(Note that I used similar Airmar PGN control when troubleshooting Sally W‘s dew point temperature issues last summer, but that required a laptop and a USB-to-N2K gateway. If and when other Airmar sensors like that 220WX WeatherStation get CAST-style Bluetooth app configuration, it will be most welcome.)
Note too that a PGN refresh rate is different from a sensor update rate, so setting the former faster than the latter won’t get you much besides increased data traffic on your N2K network. And turning off redundant PGNs, like the older Temperature 130312, can reduce traffic unless you have an older display that can’t use 130316 (see this NMEA PDF).
Meanwhile, most any MFD or instrument system will let you set a Depth offset — probably Sea Temp, Roll, and Pitch, too — but that middle screen above shows one of the slickest Offset implementations I’ve seen. For instance, CAST knows that a negative Depth offset means you’re correcting for Depth Below Keel — see proper labeling on the data display screens further up — while a plus offset is meant for Depth Below Surface. In my experience, many MFDs are vague in this department.
Unfortunately, that type-of-Depth labeling doesn’t travel over N2K, and neither do the preferred units you can set in CAST (last screen). But at least you can clearly set everything the way you want it in the app and then reference its data as you setup your N2K displays.
Oh, and note the two levels of CAST Trim/Heel calibration: Enter them manually like Depth and Temp offsets, or, if your boat is sitting right, just hold down the app button for about 30 seconds to zero out the raw values. Which also foreshadows the amazing multitude of speedo calibration levels…
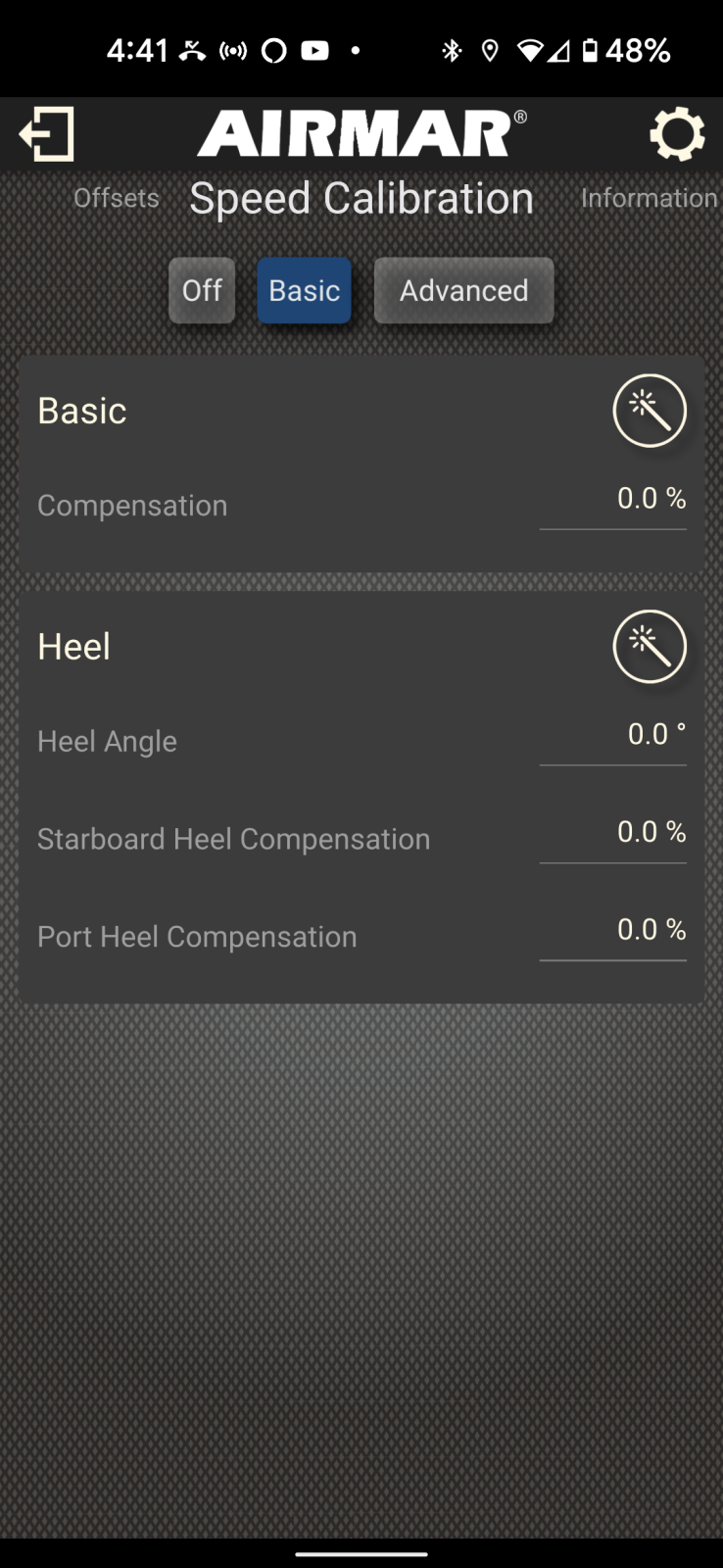
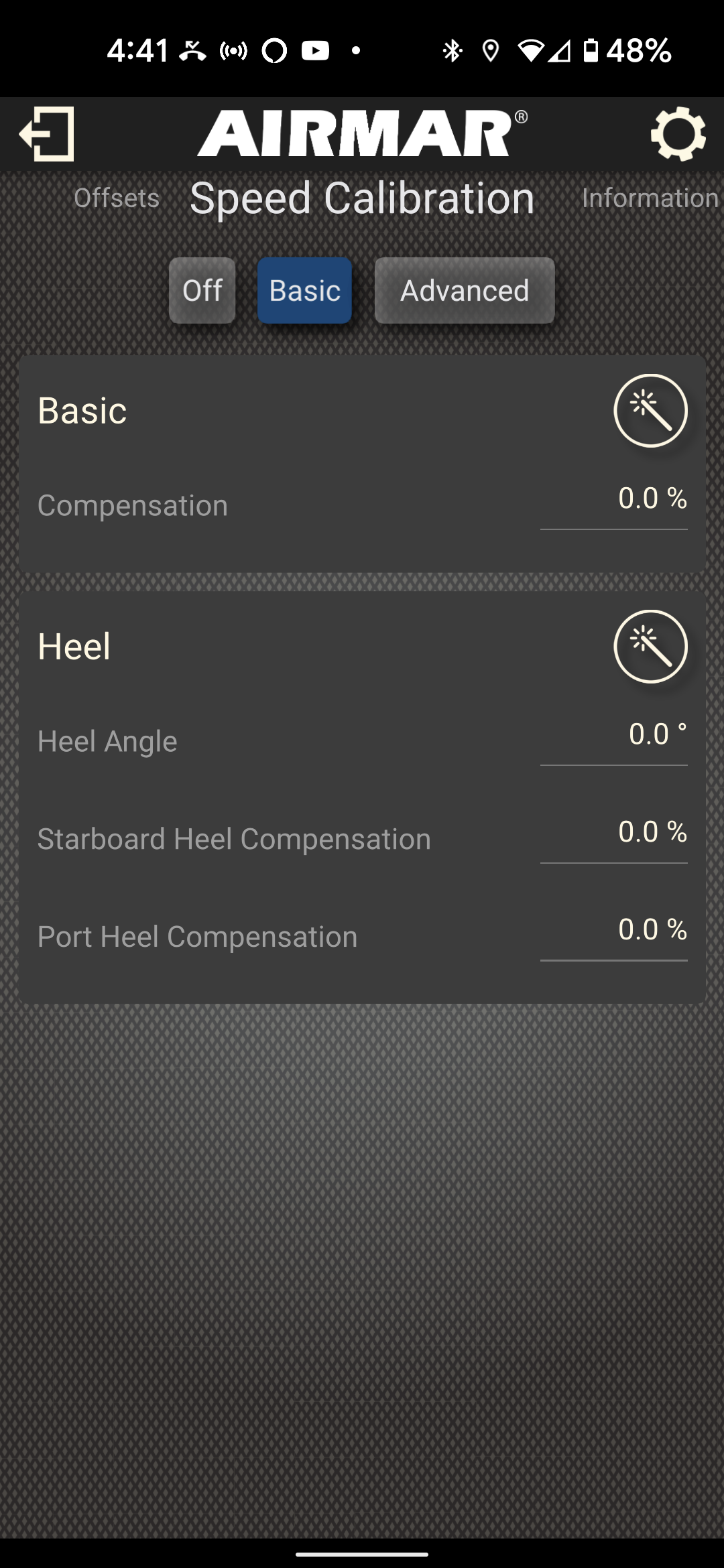
CAST “Basic” speed calibrations are more than basic 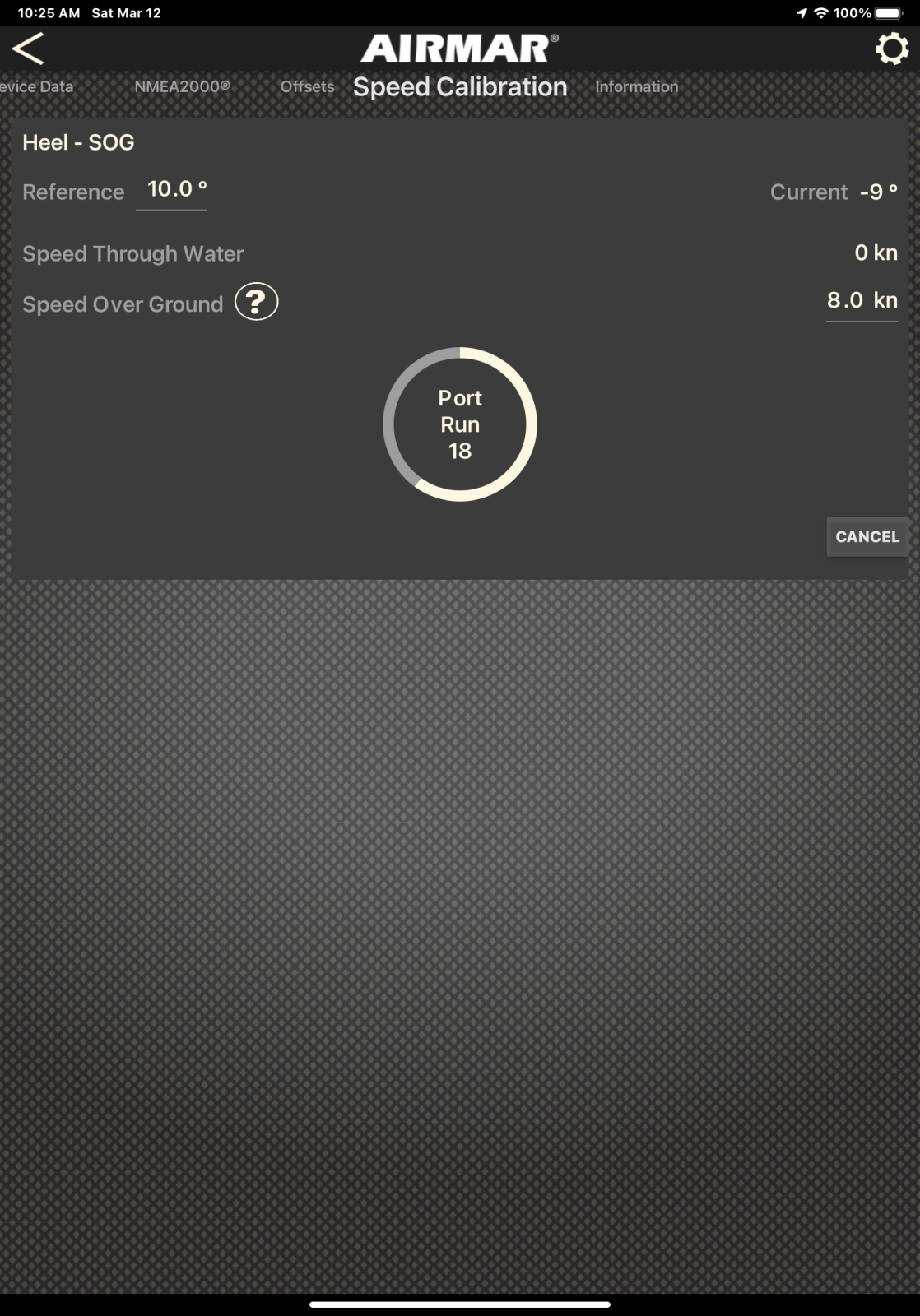
“Basic” speed calibration with heel can use multiple runs at target SOG, port and starboard 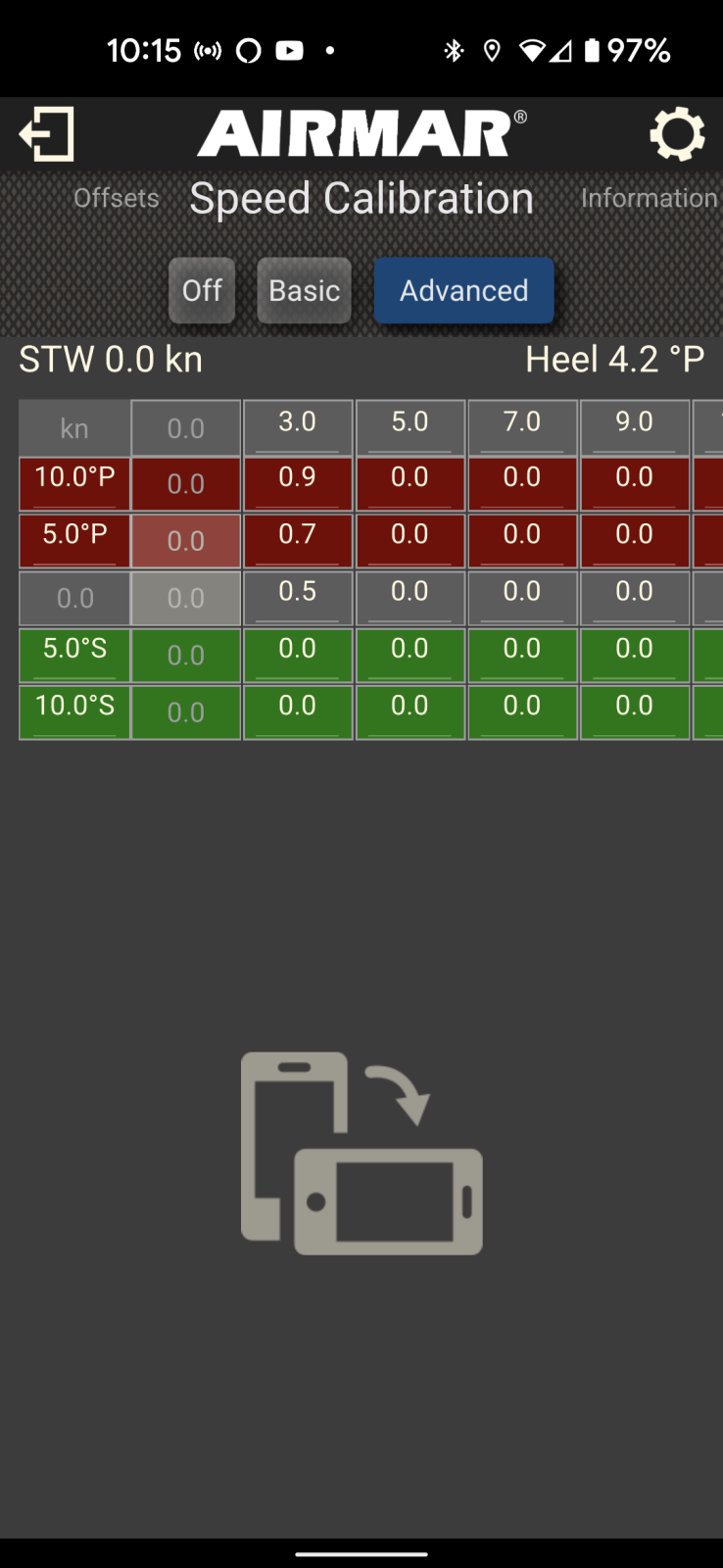
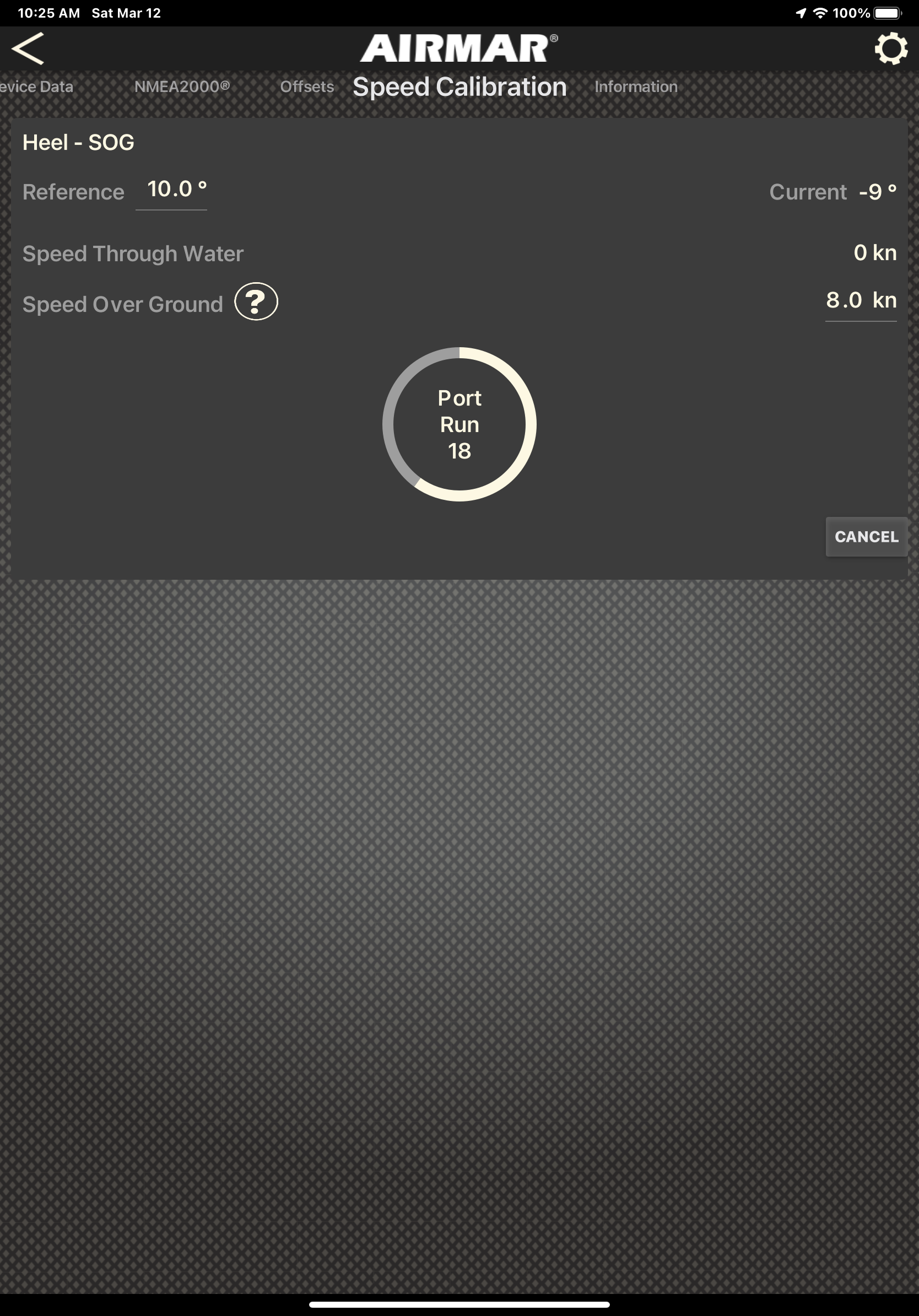
Calibrating STW is quite tricky because water often flows at a different rates close to the hull than the whole boat’s overall Speed Through the Water, and those differences can change with overall speed and/or heel, with the latter rate changes often quite asymmetrical. Yike!
Now, I know that sail racing instruments from the likes of B&G and others support deep STW calibration — I was once quite impressed with how well a Raymarine i70s can do it — but I don’t recall seeing all the choices CAST offers, and using them seems about as clear and easy as possible. (Good PDF manual here.)
So what CAST terms “Basic” is a single percentage — like +10% means that 10 raw measured knots will show as 11 knots — which you can simply enter. But that little “magic wand” icon leads to dual methods of auto calculating the percentage, either by comparing the DST800 STW to your phone’s GPS SOG (Speed Over Ground) or by running a known distance.
In both cases, CAST prompts you through reverse runs to detect and average out possible current flow, and in distance mode you can take as many runs as desired, even throw out messy ones. For many powerboats, one of these calibrations well executed at typical cruising speed is probably all that’s needed for a usually solid STW reading, but sailors will likely add the Heel mode illustrated in the middle screenshot.
Speed at Heel calibration can also use either SOG or distance but it is best done without current because separate port and starboard corrections are calculated, not averaged, because they can be truly different (unless the transducer is on the centerline). It’s also best done at a sailboat’s average heel as CAST will interpolate the heel correction against the main speed correction for other angles.
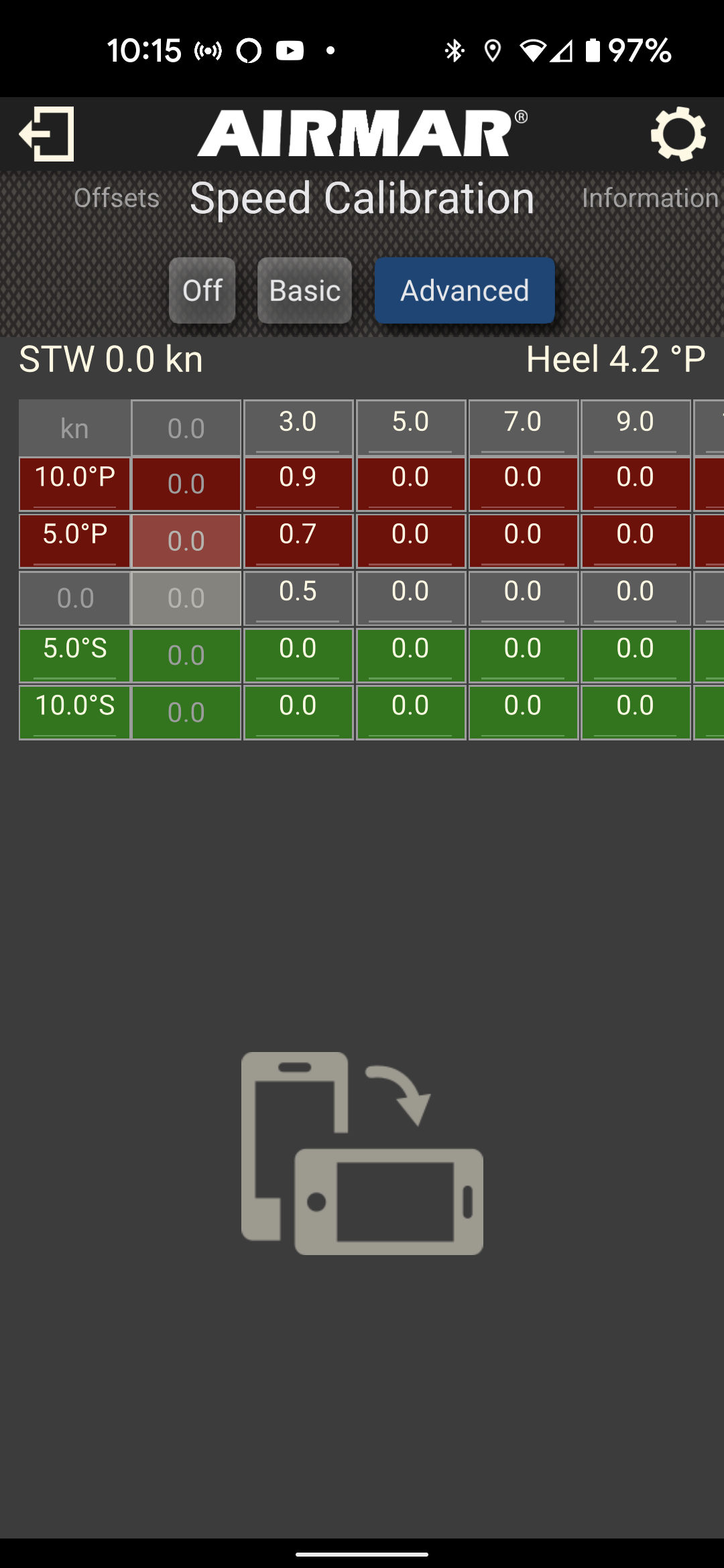
Still not precise enough for you? The third screenshot suggests how you can build a table with different STW corrections for up to 10 different boat speeds and two heel angles port and starboard. This is a manual operation presumably prefaced by lots of data logging and analysis, but I know avid racers willing to do the work to get an edge (and hope that we hear from ones who try it with a DST810).
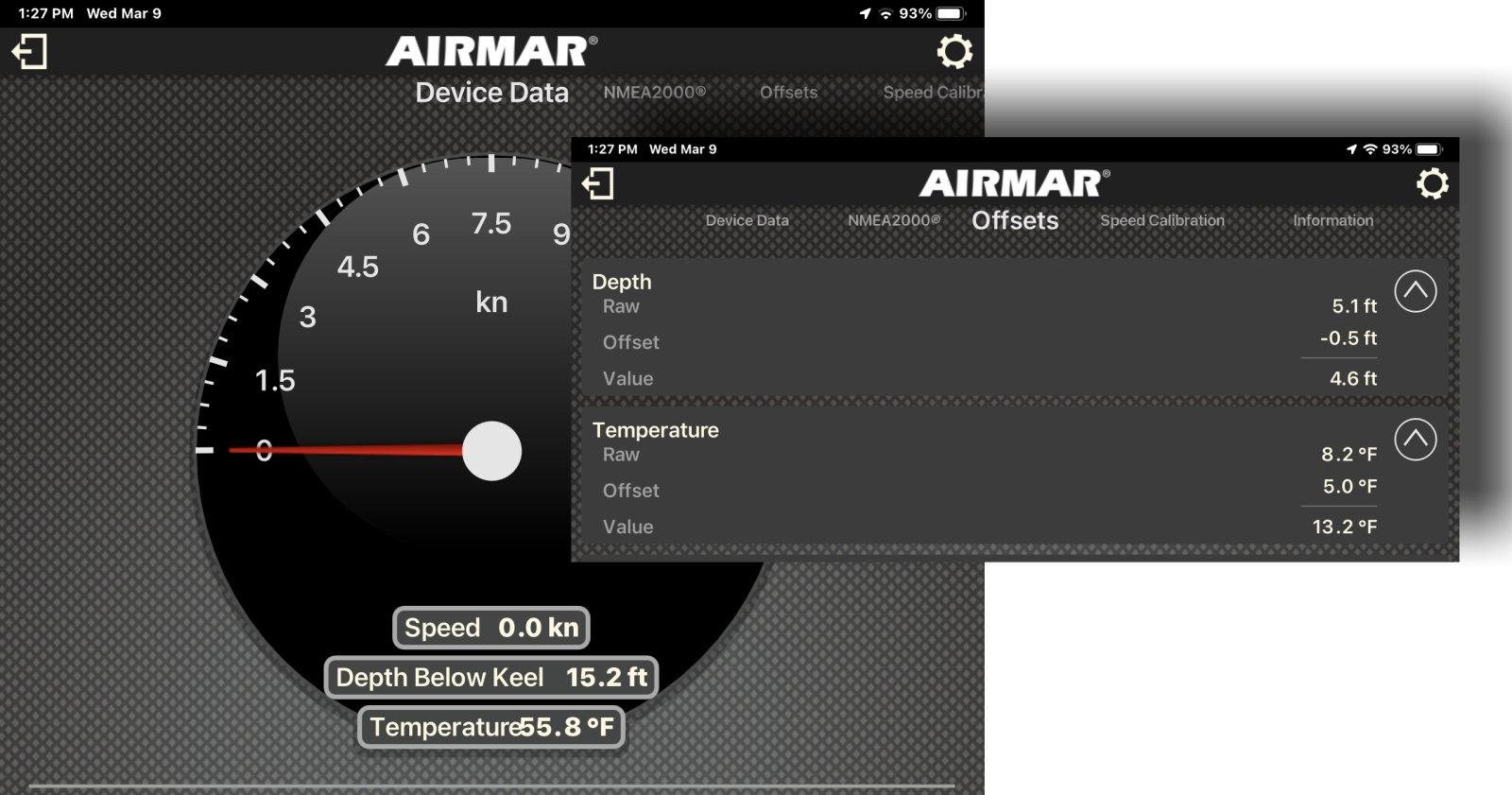
CAST iOS bug — Offsets page in meters not feet 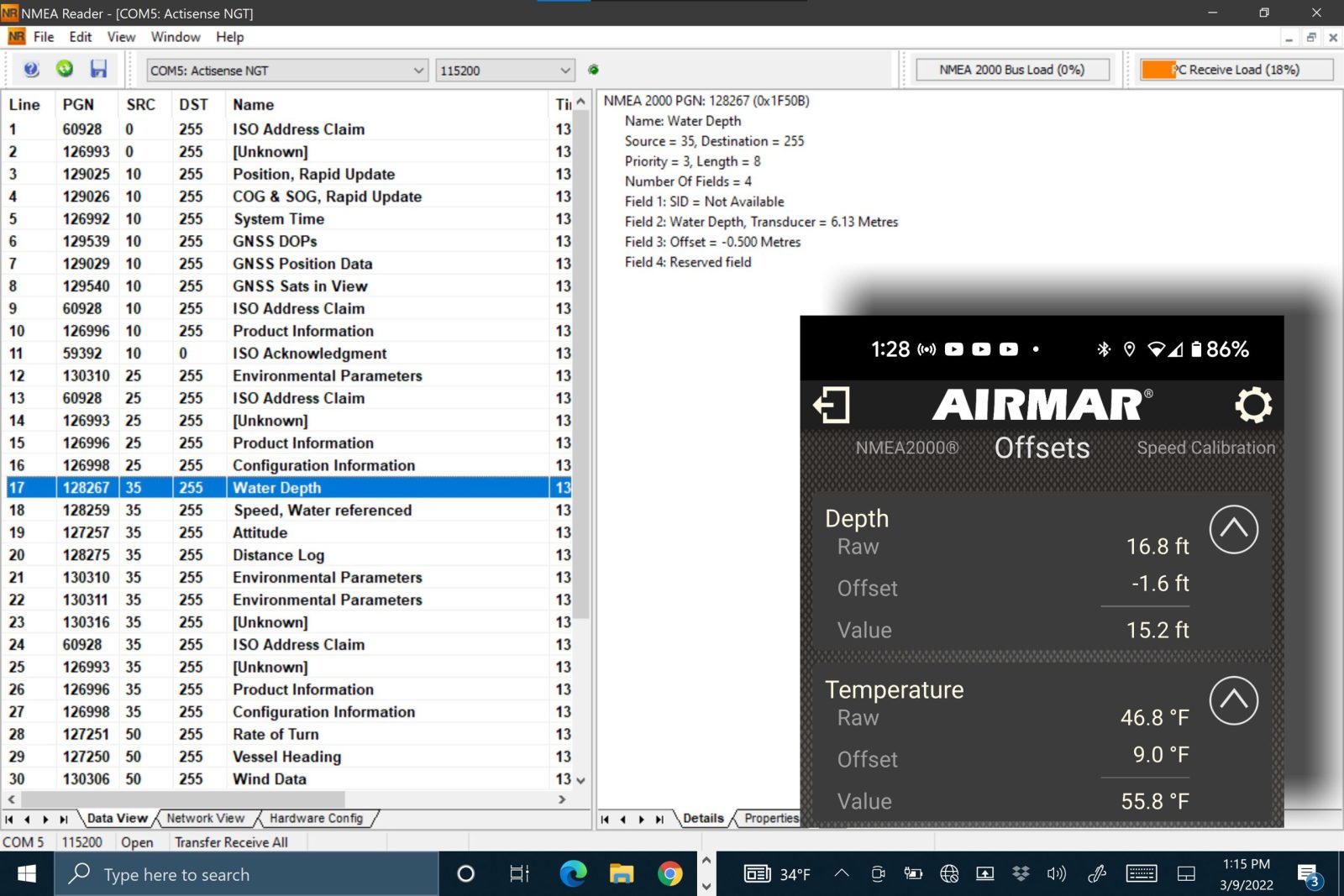
Depth PGN shows correct meter values and Android CAST app shows correct meter-to-feet conversion
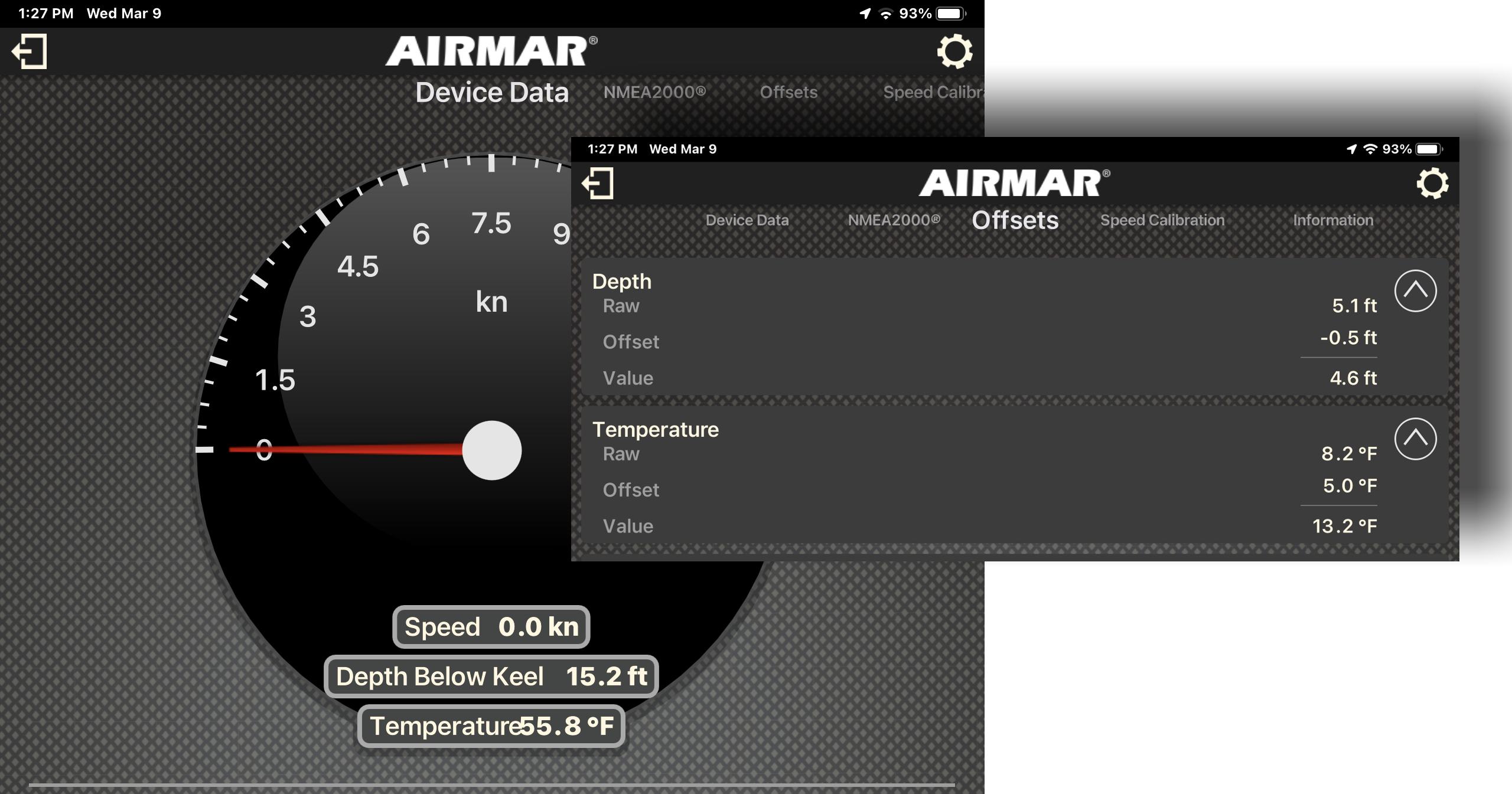

I did stumble on a minor bug in the iOS version of CAST: the values on the Offsets page are actually in Meters though shown as Feet. Hence the “5.1 ft” raw Depth versus “15.2 ft Depth Below Keel” display (in lefthand screen collage), and so my -0.5 foot offset is actually -0.5 meter. While I suspect that most users will figure this out eventually, Airmar should fix the app.
In the righthand collage, you can see that the Android CAST version of the same half-meter Depth offset is correct at 1.6 feet, and also how Actisense Reader shows that both transducer depth and offset are included in the N2K Water Depth PGN (which might further help with realizing the iOS bug).
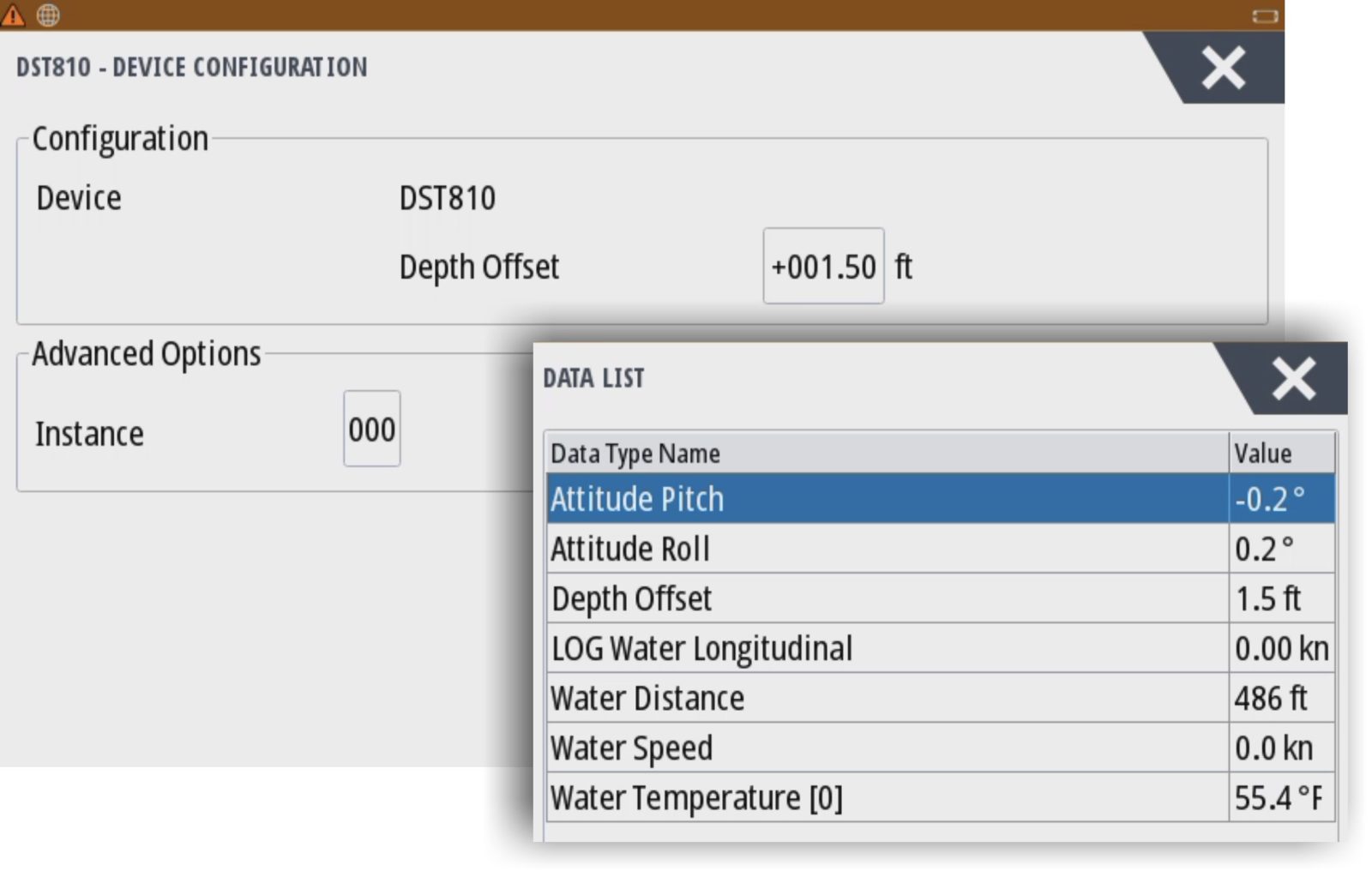
Very limited DST810 calibration on a Simrad GO5 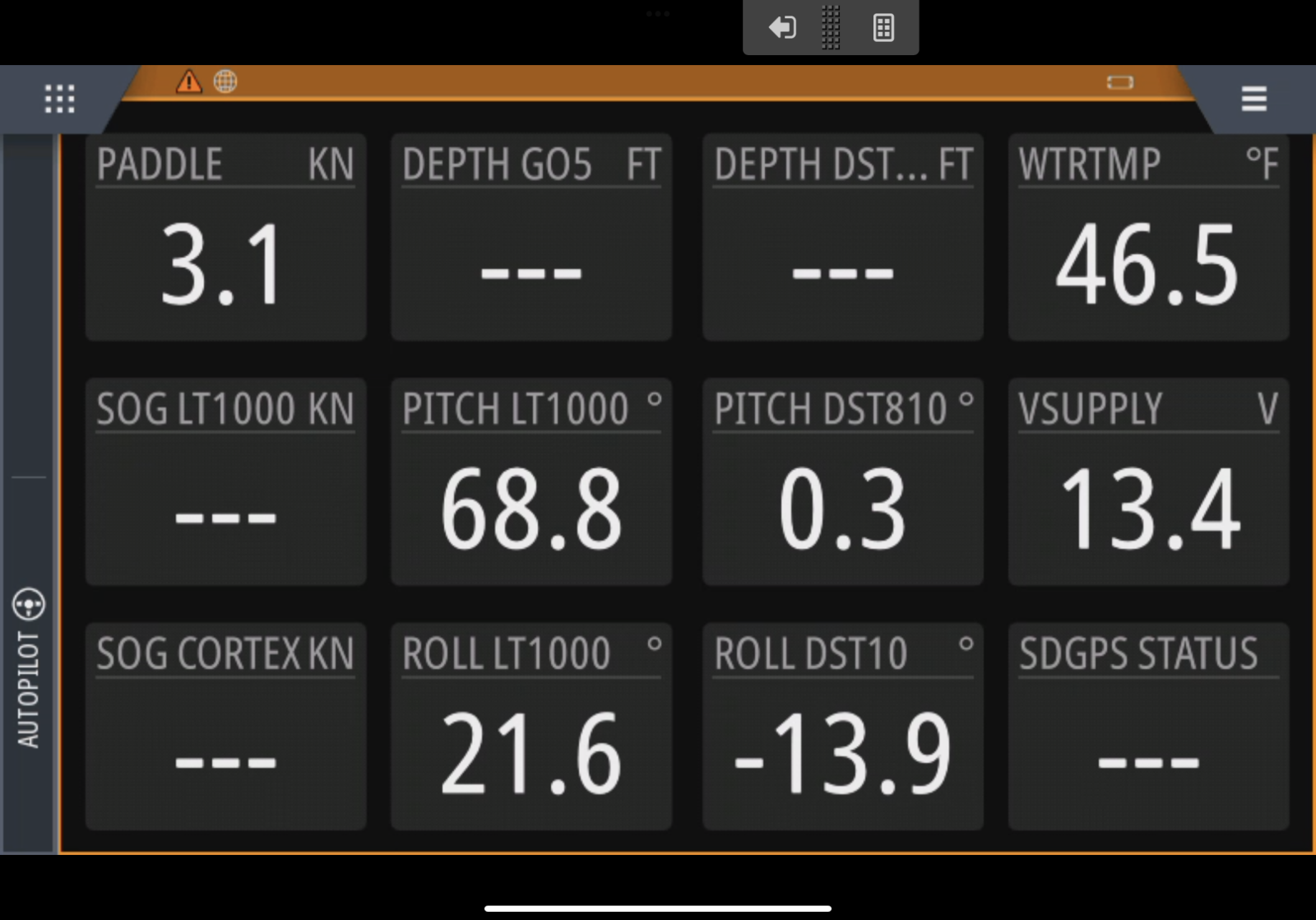
But this GO5 screen will help CAST app DST810 calibration and checking the results

Finally, here is the DST810 connected to Gizmo’s Simrad GO5 (though the boat is still in a shed). Sadly note that only two bits of device configuration are offered for the DST810, Depth Offset and Device Instance.
I was pleased to see, by opening CAST, that the +1.5 ft Offset I’d just entered into the GO5 was written into the 810 transducer (and wasn’t just a data overlay only available to same brand displays, which is how some MFD sensor configurations work). So redundant sensor access is another plus for having a separate Bluetooth configuration app.
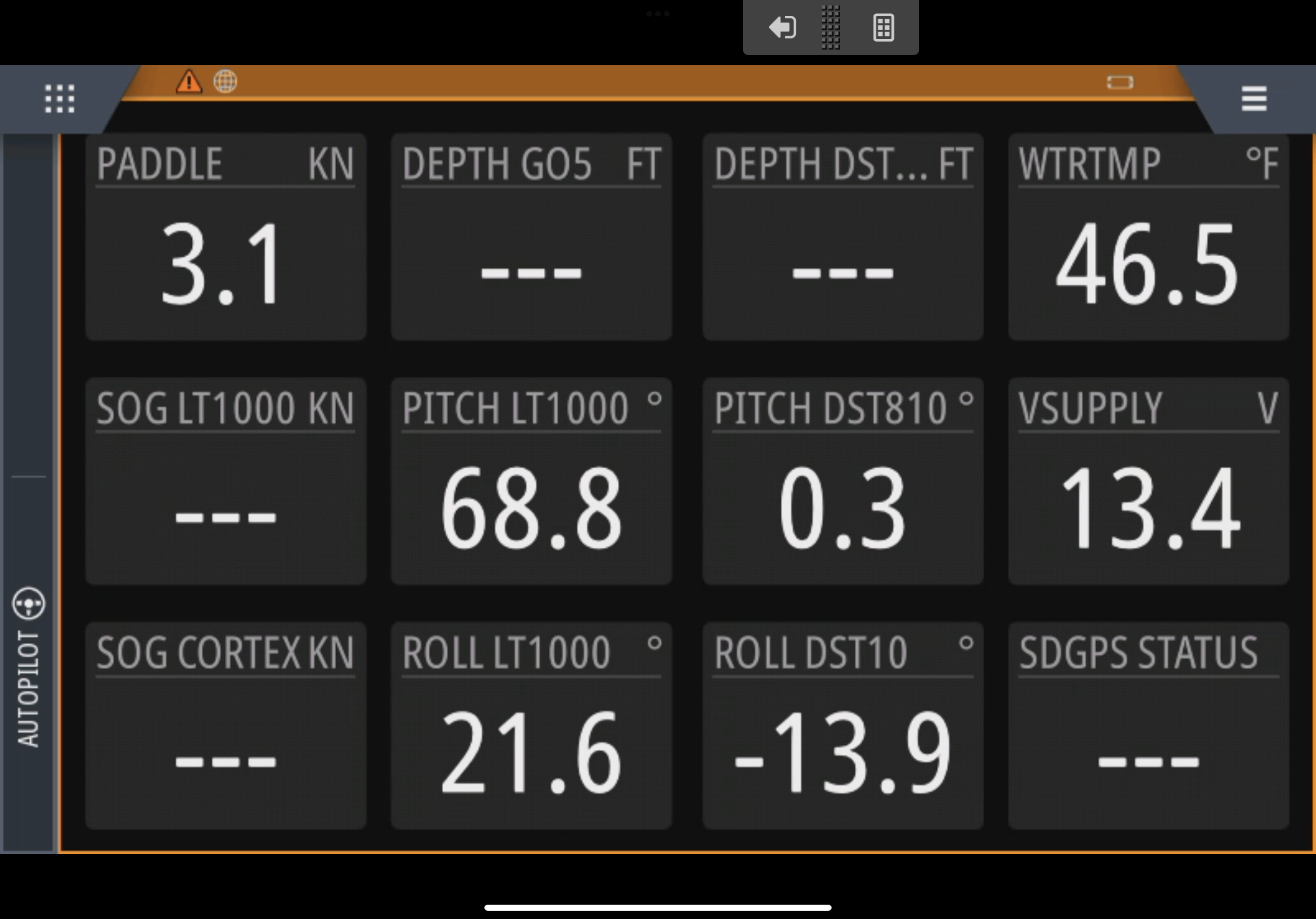
Then again, CAST is missing Device Instance configuration, though that remains perhaps the most confusing aspect of NMEA 2000. In some cases, Maretron particularly, two sensors outputting the same PGN need different Instances if you want to see both values at once. But look at the dual Depth, Roll, Pitch, and SOG values that I’ve set up to show on the GO5 instrument screen, no Instance manipulation required (and useful custom labeling included).
At any rate, the screen should be a useful reference when I finally get to experience DST810 raw accuracy plus CAST calibration on the water, hopefully in May or June. But given this bench testing — plus the wide success of the original DST800, usually despite limited calibration — my expectations are high. And maybe some readers can share their on-the-water DST810 experience in the meantime?







Hi Ben,
Just installed the UST800 ultrasonic speed/temp into a 1995 s/v Nonsuch 354. Just wondering what the excitement is about the CAST and paddlewheel when the Ultrasonic sensor has no moving parts AND, per Airmar, is absolutely calibrated at the factory and needs no OTW calibration?
Hi Michael, I had the UST800 on my boat for two seasons, and while the speed seemed quite sensitive to real-life operations and also quite linear, it was consistently about 1 knot slow versus SOG in slack water conditions.
I never figured out if it was a glitch in an early UST or something about where it was on my hull. And I never found a way to calibrate out the error, though there is a complex PC software method that you’ll find discussed in comments to this entry:
https://panbo.com/airmar-2018-part-2-ultrasonic-and-em-speedo-mysteries-unraveled-plus-new-udst800/
At any rate, I hope you’ll report on how well yours works, but I think that a UDST810 with Bluetooth and CAST would be the bomb.
Hi Ben. Well, after about 50 miles of San Francisco Bay travel in everything from dead calm water to 30 kt blows, 3 foot waves and up to 4 kts current, I can fairly report that the sensor appears dead accurate against GPS. So maybe Airmar got their act together and got this product working properly
The only strange occurrence happened early on when it randomly seem to drop out and go to zero. Since it is at one end of the NEMA 2000 backbone, this problem went away when I split the backbone with a Garmin power isolator and provided two separate 12v feeds to the NEMA 2000 network.
Also note that this is NOT the wide-mount UDST with depth sounder, but rather the narrow P17 Speed/Temp only
Thanks for reporting in, Michael, and sounds good. Come to think of it, I believe it’s possible for a sensor like the 810 to report device voltage via the CAST app and even warn you if low… but glad you figured it out yourself.
For readers here’s the sometimes handy Garmin power isolator:
https://www.amazon.com/Garmin-010-11580-00-Nmea-Power-Isolator/dp/B00ABI6BF4/ref=asc_df_B00ABI6BF4/
Sorry, off topic, know.
I’ve been trying figure out how to separate our Simnet network to add another power source (it’s a large network) but haven’t been able to find a resource to learn how to do it or what parts are needed. Do you know of something similar for a Simnet network?
Ray, one slick way to split the power to your SimNet network would be a Maretron Micro Powertap:
https://navstore.com/maretron-nmea-2000-micro-mid-powertap-tee-fm-left-5-meter-4-wire-power-drop-bottom-fm-right-cf-spwr05-cf.html
Data passes through the T but each leg gets 3 amps of 12v. Note that it is female on both sides, so you’d also need two Simnet to Male adaptor cables — https://www.simrad-yachting.com/simrad/type/accessories/cables-connectors/cable-micro-c-male-to-simnet-0.5m/ — and maybe another SimNet Tee so that you can isolate the two legs in your current setup. The split powertap should go approximately in the backbone middle of all the network loads. Alternatively, you could use the split Tee for only about half your network and leave the current SimNet powertap in place. More here:
https://panbo.com/nmea-2000-power-problem-part-2/
What is the part number for that p17 housing unit? Im looking for a replacement of the ST60 sensor package.
Chris, I think that the Airmar UST850 with P17 casing that Michael referenced is the “UST850S-P17-N2” details here:
https://www.p2marine.com/airmar-ust850-smart-nmea-2000-plastic-housing
But these are “smart” NMEA 2000 (aka SeaTalkNG) sensors meant to display on N2K instruments like the various Raymaine i series. I think that your ST60 displays use analog sensors (with the translated data then networked over the original SeaTalk), and I don’t think there’s a way for them to display N2K/STng sensor data.
There are some third parties offering replacement ST60 transducers — like here: https://jgtech.com/E26030.html (and note P17 casing) — but I’d be hesitant to put more money into what is now an old and unsupported system.
Thanks Ben!
I ended up deciding to just drop using the P17 (small hole) and went with the DST810 big boy for the P120. Airmar verified that it would retrofit the existing thru hull.
The unfortunate part is that since the 810 will replace the depth sounder and it’s combined with the paddle wheel. It leaves the boat without a depth unless the sensor goes in. It sounds obvious and silly, but, right now, im able to leave in the depth only p120 sensor all the time and go sail without the paddlewheel for casual boating days. It would have been nice to have a P17 depth only sensor. This may make me want to reinstall an old shoot thru sonar I have on my shelf.
PS While I have no doubt that Airmar calibrates the UDST well at the factory, and maybe the ultrasonic tech sees a little further out in the water than a paddlewheel, so less turbulent flow issues. But the manual says
“If the speed reading is consistently the same percentage higher
or lower than the true speed, the speed function within the
instrument needs to be re-calibrated. Follow the instructions in
your instrument owner’s manual.”
But to my knowledge there are no calibration instructions, though Airmar was trying to get the display makers to provide that.
I am using this sensor for two seasons. There are some problems with this sensor, although it probably works fine for most users.
So what are the problems I encountered?
– the temperature sensor is not calibrated, mine was off by 3 degrees Celsius.
– the temperature sensor broke down during the second season.
– the advances calibration screen in the Cast app is in m/s although it states it is in knots. Took me a while to find out.
– calibration uses the GPS of the phone. I would prefer it to use the boats GPS, as this one is more accurate.
– The cast app does not help you to collect raw data to build a calibration table on. So how am I suppose to get this data. Why not store STW, SOG and heel data in the Cast app and calculate a calibration table from this? As it is, it is very, very cumbersome to use this functionality.
– there is not enough precision in the calibration values (one decimal only) to build an accurate calibration table for slow boats.
Aswin, the temp sensor on my device went south at around 14 months as well – first just really inaccurate, then no display at all. Fortunately they have a 2-year warranty – I was able to replace mine through the selling retailer and finally received a credit from Gemeco about 3 months later. I was told the warranty department was backed up due to the volume of returns, whatever that indicates…
Hi Aswin, I just installed my first DST810 sensor and found out the exactly same issues you mentioned. They haven’t changed the software since, even though it should be fairly simple using the app
Hey Ben,
I installed the DST810 about this time last year – it worked OK, although the Depth is usually blank at planing speeds (25-30 kts.), which was a little disappointing.
That bug with the Meters/Feet display in the CAST app has been there for almost a year now, I called them about it last May and they knew about it then. I’m surprised it hasn’t been fixed yet….
Thanks, Grant. I’m curious where the transducer is mounted on the hull and also if you used the CAST speed calibration?
Hi Ben – the transducer replaced an existing, factory-located Faria model about 5 feet forward of the transom and to starboard of centerline. The yard agreed this location was as good as any. For whatever reason, it just doesn’t get a good bottom lock in 200-400′ of water at planing speeds – but its reliable at no-wake speeds, which is really when I need it in shallow waters.
I used the CAST app to set up the keep offset, etc, but I don’t think I ever calibrated the STW – I should probably do that this season 😉
There’s a lot of discussion about Speed relative to water on SA’s Gear Forum which tends to affirm my sense that accuracy is hard to get. The DST810 is getting some plaudits for the improved STW update rate, advanced calibration, and reasonable cost, but I’ve yet to find a thorough review. This is a good entry thread but searching “DST810” will yield more:
https://forums.sailinganarchy.com/index.php?/topic/220440-speedo-transducers-again/
Ben,
Great to have you back up into (water) speed!
I also installed a DST 810 last year. And can confirm your positive view of the product. I think you are right in saying that few sailors will probably be using the Bluetooth app once the install is over with (partly because the connection will drown out in the hundred other Bluetooth signals beaming around a modern boat).
The real reason i ‘am posting is to tell about another speed sensor which should receive much more attention: When I threw out the old speed/dept instruments I was left with a hole in the button (the boats, that is). Instead of “epoxy-ing”, I put in the electromagnetic speed sensor from NASA. It offers an alternative method to the ultrasonic sensors from Aimar. The technology is not new, and the sensor is quite cheap. So, I did not expect much more than it would keep out the water.
But I was very pleasantly surprised to see how well it worked. And the first time the speed wheel in the DST got stuck in muck (as aways happen halfway into the season), I didn’t care to fix it. The NASA sensor has offered a consistent (and probably also linear) speed signal all through 2021 and my trimaran in the speedrange from 0 to 25 knots. (ahm…, perhaps more like 0 to 18, but not because of the sensors fault). The output is “only” NMEA 0183 but most boaters will have an available 0183 port on their plotter.
Thanks, Jorgen! I did not know about the NASA Electromagnetic Log 2 — https://www.nasamarine.com/product/electromagnetic-log/ — and it definitely looks interesting. I note, for instance, the Zero Set and Calibration controls on the data box, as explained in the manual:
http://www.nasamarine.com/wp-content/uploads/2018/12/EML-2-User-manual.pdf
I’m curious if you wired it to non NASA display and also if the casing is the same as the standard Airmar P617V (2-inch hole)?
I installed one when they first shipped in June, 2020. I already had a Raymarine RV-200 but needed the STW to have my Axioms display drift “True Wind”: forum.raymarine.com/showthread.php?tid=987. I haven’t bothered with the CAST app but I noticed the Trim and Heel in the screenshots above…and those are displaying in my Axioms…so I think I need to calibrate those.
I connect using the the Airmar CAST app and Attitude was not enabled so they’re coming from my Airmar 150WX – and I never calibrated THOSE either.
Mike Jabara mentions end of backbone voltage drop as a possible issue in his installation early on. We almost as a rule now setup our N2 backbones with a small Victron DC-DC power supply, the ISO version which can take input as low as 9v, and has adjustable output, which we set to about 14.5 – 15v. This has practically eliminated all low voltage issues on the N2 line.
Hi
Installed a DST810 last year in one of my customers sailboat. Couldn’t get the CAST-app to work properly. I got some calibration points to work in the beginning when adding large numbers to get familiar with the advanced section. But later on it suddenly stopped to take new values. Tried to re-install the app and reset all values but still nothing. Got a new sensor this year on warranty so in a few weeks I will try again. B&G Zeus3S, 6x Triton2, Precision 9 and was using a Samsung S21 then. New phone this year.
Someone experienced the same problem?
I suspect that all data is in SI units as sent by NMEA2000. This is very annoying. It took me an age to discover that the advanced speed calibration is in m/s in stead of knots. Luckily you can devide by two to convert them.
Doe anyone know if the gen2 paddle wheel fits in the old housing?
The GEn2 paddle does NOT fit in the original housing.
Not sure what that prior comment listed me as anonymous. I am anything but that.
Thanks, that is a bummer. But I can understand from selling point they don’t fit.
I’m confused. I know that Jonathan knows his stuff, but Airmar is quite explicit about how the DST810 with Gen2 paddlewheel fits in the same casing and even retrofits into older 2-inch Airmar casings (which is how my DST810 is mounted in Gizmo):
“The Gen2 paddlewheel is now being included with Airmar’s most popular depth/speed-through-water/temperature sensor, the DST810 Smart™ Multisensor. Upgrading to the Gen2 paddlewheel adds industry-leading low-speed performance to the DST810’s already robust resume of groundbreaking features, and since the housing of the DST810 remains unchanged with the inclusion of the Gen2, it will easily retrofit into existing Airmar 2” housings for a quick and trouble-free transducer upgrade.”
https://airmar.com/uploads/PressRelease/AIRMAR-Gen2-Paddlewheel.pdf
Clarification: The Gen2 paddlewheel can not be fitted into an older transducer housing like the original DST810, i.e. the part that houses the paddlewheel, other sensors, and electronics. But a new transducer with Gen2 paddlewheel fits in the same standard Airmar 2-inch casing, i.e. the part that’s semi-permanently installed in a hull. Jonathan agrees.
Hello,
I’ve just acquired a brand new DST810 SmartTM Multisensor with Gen2 Paddlewheel (with Raymarine stng plug). What I observed is that the new Gen2 Paddlewheel is much stiffer than previous generations wheels. I mean, old gen wheels would spin many times freely once hit by finger out of the water but the Gen2 is barely moving with same amount of pressure. Is this normal or my transducer might be faulty? Thanks
Great article. Quick question: Does the DST810 fitting includes a flap valve? I assume so, but didn’t see it in the product description or mention of it here.
Yes – the thru hull housing has the flapper valve.
I’m having trouble finding out if all DST810 Smart transducers, i.e., Garmin, Raymarine, Airmar, are identical units from Airmar. I ask because there seems to be a significant price spread with the Raymarine version typically being the most expensive. I planning to go with Raymarine instruments but can I safely buy an unbranded Airmar version of the DST810?
They are all virtually identical except for 1) part #s can be different if they are boxed for different manuf like Garmin or Simrad, and 2) the RAYMARINE version IS different because it has the #@*&%# SeatalkNG connector on it for their network. All of the others have a standard DeviceNet N2 connector. Beyond the connector they are identical. I frequently buy the Furuno labeled version because one of my distributors typically has them priced lower than the others, but it is identical.,
Jonathan: Thanks for your reply!
I’m not committed to Raymarine yet. I’m setting up a new-to-me Olson 25 (sailboat) for offshore racing and it needs all new electronics. I need VHF, AIS transceiver, Depth/Speed/Temp, wind info and compass to drive a tiller pilot, and a basic chart plotter. I was attracted by the Raymarine i70s MFD as it will display all the info in need at a reasonable price. I’m also planning on an Airmar 200WX or 220WX Weather Station for wind and compass.
I’m new to N2K and networking boat electronics in general – last boat I owned was in the 1980’s – MUCH simpler! Your comment regarding SeatalkNG vs “a standard DeviceNet N2 connectors” encourages me to step back to the “drawing board”. It is rare to have a clean slate so I’d like to get the basics as “right” as possible and using a standard network appeals to my general instinct to avoid things that are proprietary.
Might be the wrong thread here but are you aware of an MFD like Raymarine’s I70s that using standard connectors? If there is no such device perhaps a standard N2K network backbone/trunk line with a drop to the Raymarine i70s using their Seatalk-to-DeviceNet adapter ($) or wiring it into a junction box.
Thoughts?
Jonathan, as always, is a trusted source, but I’ll add my 2 cents:
* SeaTalkNG is annoyingly different from standard N2K cabling and connectors, but it works fine, and if that’s what you have already set up in your boat, buying the Raymarine DST810 means not having to also buy an adapter.
* Airmar is transitioning the DST810 to models with the Gen 2 paddlewheel and it looks like the Raymarine Gen 2 model may be an early arrival at the online stores. So that might account for the price difference you’re seeing? https://www.airmar.com/productdescription.html?id=222
* Airmar (and Gemeco) try but it’s hard to find specifics about the many, many transducer models. But a phone call to customer service may help.
Yike, I see how price and Gen1/2 differences can be quite confusing. Hodges — reliable and often lowest price in my experience — lists the “Raymarine Dst810 Gen2 0 Degree Thru Hull” for $400 (while Defender has it for $362). Meanwhile, Hodges lists the “Airmar Dst810 Plastic Smart Sensor 235khz – Nmea 2000 – Bluetooth” with a Gen 1 paddlewheel photo, but the product text clearly states Gen 2. Then again their “Garmin Airmar Dst 810 Smart Transducer – 0 Degree” at $346 pictures and apparently really is a Gen 1 model. Shoppers take care!
Ben: Thanks for you replies!
I’ve seen even bigger price differences and lots of unclear product descriptions – very confusing for the noobie but you and other here are helping me break it down. One step at a time, design the system, verify the concept and parts, go!
Kurt, I’m pretty sure that all the other multifunction instrument displays — like Garmin’s GMI 20 or B&G’s Triton 2 — have a standard N2K DeviceNet female port on the back. But if you like the i70, there is a little adapter available:
https://panbo.com/raymarine-adds-easy-stng-to-n2k-adapter-plugs-and-a-seatalk-ng-alarm/
Got it and thanks again!
So a little mea culpa. I may have been a bit harsh with my SeatlkNG comment. Raymarine is not alone in having started into N2 with a proprietary fitting. Navico/Simrad/B&G began their N2 efforts with Simnet, which was of their own design. But at least with Simnet you could see what they were thinking and why. It was so measurably smaller in diameter that boat builders liked it as it made wiring through the boat easier. But even they eventually realized that the best path forward to join the norms and go to the M12 5 pin DeviceNet fitting. Raymarine seems to not have arrived at that point. If you are planning on an end to end Raymarine system then SeatalkNG won’t be an issue. As many have mentioned it is pretty easy to adapt one to the other.
As for DST810’s if there are any out there with Gen1 paddles left then they are old stock. Airmar started shipping Gen2 paddles quite a while back. They are much better at low boatspeeds than the originals. This is less an opinion and more of a demonstrated fact based on cal sessions comparing both on a tight OneDesign platform (NYYC IC37’s)
I appreciate the follow up as much as the strong and clear original comment! I’m having to make up for too many years away from marine electronics and I always prefer to learn from others as much as I can before making my own mistakes – life if too short to learn everything the hard way! I believe you helped me determine I’d prefer standard connections for the primary backbone/trunk and use the adapter Ben referred to if/as necessary for the occasional proprietary drop. This would allow me to use the less expensive versions of the Airmar DST810 transducer (and pay for the necessary adapter if I go with Raymarine i70s). And, as Ben pointed out, Raymarine appears/may be moving away from SeaTalk as there is no such connection on the Axiom+ line as far as I can tell!
Thanks again for sharing you hard-earned experience and opinions!
I wish Airmar had documented the app better. The “manual” is really just the quick start guide, which doesn’t cover the speed calibration modes. Calibrating on a sailboat I’ve found the automatic calibration confusing / poorly explained. Ex, do I need to do the basic *and* heel compensated calibration or does the heel compensated calibration completely replace all the values from the basic calibration?
The basic calibration has me motor in forward for 30 seconds and then motor backwards for 30 seconds. Which is kind of odd. Presumably they think this enables them to cancel out effects of current present, but in my test the paddlewheel spun faster in reverse than in fwd, and I don’t think that was entirely due to current. This ended up with the app suggesting a speed modifier which I think is bogus / incorrect. The paddlewheel may spin faster in reverse simply due to hull shape and flow past the keel hitting the transducer.