
Garmin GHP 12 autopilot, hello sailors!

Yup, that’s a Garmin GHC 10 autopilot head steering to an apparent wind angle, along with one end of a linear drive typically used to control sailboat rudders, but never before supported by Garmin. Announced today is the GHP 12 sailboat autopilot system, which will work with a choice of two linear drives designed to handle sailing vessels from 20 to 70 feet…
Specifically, the Class A Drive seen in the photo below is for boats up 28,500 pounds of displacement, while the Class B Drive goes up to 79,000 pounds. An interesting and perhaps unique feature of the A Drive is that it contains a rudder angle sensor (the rudder sensor on the B Drive is separate though it mounts right on the drive). The original Garmin GHP 10 autopilot, which is only for hydraulic steering systems, doesn’t need or come with a rudder angle sensor, though many users install one just so they can see where their rudder is. On the other hand, the new GHP 12 system does not include the GHP 10’s Shadow Drive feature, which lets a user disengage or engage the pilot simply by turning the wheel or leaving it still for a moment (which can be sensed hydraulically). Otherwise, the two Garmin ap systems seem to share a lot of attributes…
One is that spherical gyro compass, which seems to be one of the reasons many GHP 10 users experience extraordinarily steady automatic course holding. Note that while it cables directly to the GHP 12’s processor, it also has a NMEA 2000 port, which means its fast heading info is easily available to other device. And I like the way the Garmin release states that “When interfaced with Garmin’s GWS 10 or other compatible wind sensor, GPS and network
electronics, the GHP 12 can support workload-saving features such as
heading hold, wind hold, step turns, tack/jibe, MFD route following and
more.” The italics are mine, but that’s still a declaration of interoperability you don’t see every day. Not that a GWS 10 and GMI 10 displays aren’t good wind instruments, but it’s nice to hear some assurance that standard N2K wind and other data will work with this autopilot.
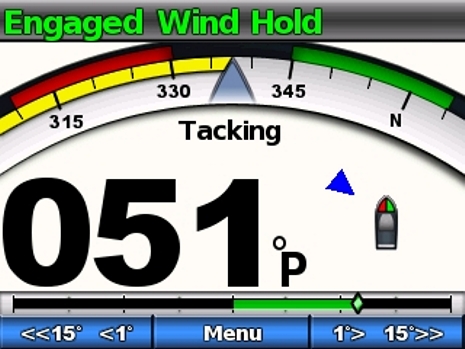
And obviously the GHP 12 works with the same GHC 10 control head as Garmin’s other autopilot (which actually began its evolution as the Nautimatic TR1), in fact up to three of them distributed along an N2K backbone. I’ve had some time with that control before, and have little doubt that Garmin will do a good job of implementing sailing functions on it…and improving those functions over time. Seen below is a tacking screen which looks good (though it may include a mock up error; shouldn’t the rudder be to port if the boat is just beggining the manuever, as indicated by the yellow band?). A complete GHP 12 system with one GHC 10 control head will retail for $3,900 or $5,000, depending on the drive needed, and they’re suppossed to start shipping Q1, 2011.










I’m in the marked of new autopilot. Today we have a Raymarine installed, but I’m planning to go for a hydraulic one.
I have Furuno SC-30 satelite compass installed. ( Navnet 3D )
Do I get some advantage’s of choosing Furuno Autopilot ?
( NKE looks also very interesting )
Ben-
I realize that most manufacturers call their fluxgate compasses with rate sensor a “Gyro”, but they are not. They are a heading sensor and are affected by magnetic influence as a true gyro is not.
Good point, Arnie, and entirely my poor word choice. Garmin doesn’t seem to call it a gyro compass or even mention rate stabilization, though I’m pretty sure their Course Computer Unit (CCU) has it.
Reginaowner, I think you could use your SC-30 for heading input to Furuno’s AP and to several others. In fact, I tried it with the Simrad AC12/AP28 I just installed and it worked very well. But I’m pretty sure that the Garmin CCU, which may have more than a heading device inside, has to be used with Garmin APs.
The garmin ccu has a rate gyro ( and it’s correctly so called)
Dave
Ben
Any idea whether you can use this system without the Garmin drive units, if you already have a linear drive from an old pilot.
Also can you run a rotary drive or a linear hydraulic from another supplier if the linear drive isn’t appropriate
I doubt it, James, what with the rudder sensors built into or onto the drives, not to mention the pre-made cables to connect everything. Note they’re color coded, a nice detail I spotted in some other recent Garmin hardware:
https://panbo.com/archives/2010/07/garmin_7000_and_ais_600_some_install_details.html
But when I look more closely at the GHP 12 system photo above, I’ve got to wonder what the heck the orange “Encoder” port is about?
Thanks for that Ben.
That’s a real shame as there are plenty of old boats with perfectly good drive units looking to upgrade their control heads and computers to something newer.
Can’t help feeling Garmin has missed a trick here along with only being able to use the Garmin pump on their hydraulic pilot. It reduces the size of their market considerably.
I am sure they have their reasons though
Ben – this Garmin development is an added cog in the refit decision-making wheel. I too am in the market for an autopilot, instruments and MFD for a a 46′ 32,000# aluminum sailboat. She’s a former offshore racer being refit as a cruiser and long distance racer. Because of the plethora of options and opinions out there, decisions related to the above rattle my brain more than any other aspect of this refit.
As far as AP’s go, IN YOUR OPINION, where does this Garmin unit fit on the quality/precision/durability spectrum compared to NKE, B&G/Simrad and Raymarine? My guess is, close to Raymarine with NKE having a slight edge over B&G. Is this fair? And as a now complete electronics application vendor, which horse to bet on – Garmin or Ray?
Then there is the issue of proprietary networks, N2K seamlessness – or lack thereof. Good grief. How is anyone supposed to identify a clear winning configuration?! (This last bit was a rant!)?
“How is anyone supposed to identify a clear winning configuration”
Every manufacturer tries hard to ensure that you can’t identify one or if you can it’s there’s.
Dave
“…where does this Garmin unit fit on the quality/precision/durability spectrum compared to NKE, B&G/Simrad and Raymarine?”
Holy cow, Michael, I doubt that there’s anyone walking the planet who could answer that question with any real expertise. Autopilot performance and durability have so much to do with the specific boat they’re installed in, how they’re installed and tuned, what conditions they’re used in and how, etc. etc. And because they don’t get changed out very often, few people have experience with multiple pilots in like circumstances. Which might not be relevant to another user and vessel anyway.
Bigger picture: The only way anyone can cram the marine electronics brands into Good, Better, Best ratings is to ignore a lot of dynamic realities. For an extreme example, consider the Simrad NSE series; about the only similarity between it and prior Simrad MFDs is the name on the box.
The same goes for complex categories like MFDs. If anyone tells you that Brand X MFD is the Best, that’s a good sign they don’t know what they’re talking about. A vague answer to that question may be possible for a particular user, but it starts with a lot questions about the user and uses.
When you get down to simpler, more quantifiable categories like, say, the 18″ radome testing I did, rankings are more possible, but there are still lots of caveats. What’s the value, say, of terrific advanced features if the user is never going to learn how to use them? And, mind you, an 18″ radome is going to work on your boat about like it works on mine. But not an autopilot, even if I could install and compare four of them nearly simultaneously.
Bearing all that in mind, it is worth noting that the Garmin AP is based a (Nautimatic) design that really did seem to break new ground. And the chief designer, who really was involved with rocket command and control science, is still working for Garmin. But then again, a lot of Nautimatic’s once fresh ideas — like virtual rudder feedback, turn rates scaled to g-force, and pattern steering — have been adopted by other manufacturers. Any of whom is capable of major step changes as they roll out new models.
Sorry for the rant, but there are no simple answers, or rankings. However, there are a lot of winning configurations, though it may take a lot of brain rattling to find your own.
When Garmin decided to make their GHP 12 completely proprietary they lost an entire refit market – How short sighted. When I designed the layout for my autopilot I made sure the drive system was the best I could buy as it is the most important part of any autopilot system. The linear drive is not subject to obsolescence like the rapid developing software in the electronics package. If you don’t have a highly capable drive system no electronics package will do any good. Therefore, I went with a Kobelt hydraulic cylinder, (which is a piece of industrial art). I assumed the electronics would eventually become obsolete and this could be changed for the latest and greatest while still using the same drive system.
I would love to have chosen Garmin AP electronics to go with my existing hydraulic drive and other Garmin Network products. I’m tired of sending back my entire ComNav processing unit and control head every time I want a software upgrade. Since Garmin is famous for seamless integration via N2K of their chart plotters, VHF’s, etc…and Garmin’s software updates are outstanding, the GHP 12 would have been a perfect match.
Ben,
I’m going to be ordering a new 54’ Offshore powerboat with twin C9 Cats soon. I’m planning on installing all Garmin electronics (with four 7215s for both helms) except for a Simrad AP. I personally have no experience with the Simrad AP, but my reasons for it are 1) every manufacturer’s rep. I’ve talked to has said that the Simrad AP is the best, and 2) I’m concerned that because the Garmin is derived from the Nautimatic TR1 (which was initially an outboard motor AP used primarily for fishing), it will not be as appropriate for a 54’ powerboat as the Simrad. Also, I’m not sold on the concept of the virtual rudder feedback, but that’s just my perception. I’ve recently learned that a couple of Garmin integration features between their plotters and APs (I believe one was MOB position return) are not available in conjunction with APs from other manufacturers. I’d appreciate your opinion of which AP might be the best all around choice in terms of dependability, precision, and function, (especially in confused or following seas) for a 54’ powerboat.
Jim W:
1. On behalf of the boating industry, thank you 😉
2. I hope you read my comment above about how difficult it is to compare autopilots, and will keep that in mind as you read the following.
3. The reputation of the Simrad (formerly Robertson) AP is sterling. And I’m very impressed with the new Simrad AP I just installed on my boat, especially how well it integrates with a Simrad NSE. But I certainly don’t know if it’s the “best” or if there even is one best AP.
If I were you, I’d be giving the Garmin GHP 10 a very close look. I don’t think it matters where the technology started 8 or so years ago. Where I’ve seen it perform very well, though briefly, was a boat nearly as big as yours:
http://www.powerandmotoryacht.com/electronics/autopilot_garminized/
The Shadow Drive feature is significant, I think, and I do believe that you get some extra functionality by having a Garmin AP with an otherwise Garmin system. For instance, I like the Garmin auto routing feature, even if it makes mistakes fairly often, and I think Garmin only permits its own AP to steer it. Plus — and I don’t like saying this, as I advocate hard for interoperability — having one electronics brand means that one can’t point fingers anywhere if something goes amiss.
But some time soon I will try plugging the test Garmin 7212 into Gizmo’s SimNet network and see how it works with the Simrad AP.
I had the same problem, I had an old Cetrek autopilot a real POS. But the pump and plumbing were perfect. Really liked the Garmin, but it would have meant a complete replacement.
Its an unusual mistake for Garmin, maybe Ben , with your contacts you could find out why this integrated approach only.
Dave
Garmin autopilot pumps have a shaft encoder to measure speed and rotation of the pump, allowing very precise control. Hence you need a Garmin pump/actuator with their systems.
Like there are no bad dogs, there are no bad mainstream auto pilots. All work very well, and if asked, this is my answer. Integration, integration, integration. If you have a Ray system, use the Ray pilot, If you have a Garmin system, use the Garmin autopilot. If you want something else, it will work well, the integration just will not be as slick, and all of the manufacturers work very hard on the integration. You cant lose, but you may be able to do better.
I’m wondering if Garmin uses also auto-learning like Raymarine has on there autopilots. Different situations, wind and waves; it is so important how a autopilot is reacting on these influences. Specially wind downwind courses.
Ben, do you know if they have autolearn functions?
And is the gyro equipped with the same sensors as the headingsensor (https://buy.garmin.com/shop/shop.do?pID=63748&ra=true) (3 axial gyro/Three-axis accelerometer/Three-axis solid-state compass)
André
Bill, Thanks for explaining the orange plug for the encoder, and hence why Garmin APs won’t work with existing drives. Also good advice on same brand integration, though somewhat painful for folks mixing brands, or evolving from one to another. I tried plugging the Garmin 7212 into Gizmo’s SimNet system today and while it picked up all the N2K data fine, the Simrad AP system did not seem willing to steer to route or go-to commands entered on the Garmin. I’ll fool with it some more next week (after the Newport Boat Show) but I think it’s a no-go.
Andre, Garmin seems almost weirdly unspecific about the specifications of its AP. I can’t find anything about that compass, though clearly it has rate sensors (or it couldn’t control turns by g-force). And I don’t know if it continues to learn a boat’s characteristics after the initial autotune routines. Then again it might not need to, if the control software and motion sensor are good enough. Here’s an interesting review of the GHP 10:
http://www.marine-electronics-reviews.com/garmin-ghp10.html
I know I am going to get some people mad, BUT if you are in the market for an autopilot DO NOT buy B&G’s. Despite their claims the pilot software is full of bugs, like it will only tack a boat if you backfill the jib which makes things a bit hard for singlehanded, it can’t follow course to NMEA waypoint without having to press the “next” a few times along the way, it will not sail downwind in 13-15knots of wind and any significant (i.e. 3 feet+) seas! And B&G’s support is none existent! Yes Raymarine’s instruments are not as glamorous or are as “accurate” as B&G’s but Raynarine’s s3g pilot is magnitudes better than the B&G pilot/software that regular Joe gets.
I can very well see Garmin easily producing a better pilot than B&G’s at a fraction of the cost. I do own both Raymarine (ST290 and S3G gear) and B&G H3000 Motion, and would not mind investing in a Garmin solution if their instruments and pilot offered more flexibility like the Nexus…
BTW the most used autopilot in this year’s Transpac was Raymarine’s
May I drag this conversation just slighly more off-topic and ask this long time question of mine?
Our 45ft sailboat has a “trusty old Robertson” (J300X with two AP11 control heads) like the one Ben has just replaced. On two occasions I have experienced what I would call a complete failure to control the boat. We were under sail in short somewhat ugly seas with the wind on the beam or aft of the beam. I was hand steering. A gust told me that the time to reef is RIGHT NOW. I pressed auto and went to the companionway to work on the winches. Either before or after I released the main sheet and brought the boat out of trim (or probably simultaneously), the autopilot started losing control in that it was alternatingly laying 45 degree rudder to port and to starboard, bringing the boat to a near halt. The boat has probably been 60 degrees off course in both directions during this. In one case we would have crash-gybed if I hadn’t made it back to the wheel in time (from a beam reach to a crash gybe! I now listen better to people’s advice to rig a preventer whenever not close hauled). I had to hand-steer to get the boat moving again. This was in “auto seastate” mode. Since then, if we are in open water, I set sensitivity to “manual 5” (6 is the least sensitive) but I must remember set it back to “manual 1” if we are returning in the marked channel or I will get upcoming traffic very nervous by veering around drunkenly 10 degrees either direction.
This gave me a feeling of mistrust (so an un-trusty old Robertson). The thing can steer at under 1 degree accuracy in flat water but I couldn’t, for example, trust it to hold the bow into the wind under engine in a significant sea with the sails up and flogging in a MOB situation.
My experience is somewhat in disagreement with the “just buy anything and you’ll be fine” sentiment in the above comments – except the last. Reading comments of ocean racers about the NKE pilot which steers “better than they can” in atlantic storm conditions sounds like a distant dream. Our boat would be broached and knocked down in under a minute in those conditions.
I hope this is because of rotten heading information that jumps around far more than the boat actually is. Can you confirm?
If so, would a better heading source alone help? I remember the video on the Airmar page about the H2183 compared to “a competitor” (that happens to look remarkably like the one I have).
Is the rate sensor information in a “rate gyro” sensor used to stabilize the heading information to send a stabilized heading out to the boat and the autopilot?
In that case, such a sensor might help.
Or is the rate information sent to the AP course computer anlong with the unstabilized heading information and interpreted there?
In that case I would have to junk the J300X.
Also, what about the G-sensor in the H2183 (is is descibed “3-axis compass, 3-axis accelerometer, 3-axis rate gyro”)? Will these fancy things give a smooth heading for my Robertson even if the sensor is placed in a clothes washer?
If not, what should I do to get an AP that I trust?
Take a look at the single handed site out of San Francisco, there is a thread where different sailors list what worked and did not in their last Transpac.
here is the link http://www.sfbaysss.net/showthread.php?t=615
All of the pilots in the “What Worked” are Raymarine, the only NKE is in the “WHAT DIDN”T WORK”. It is important to remember that a failure in the ram is NOT a pilot failure. I worked with B&G for over 2 years trying to make their pilot able to TACK, GYBE and hold course and we could not. The truth about these “big” manufacturers is that they spend hundreds if not thousands of hours fine tuning the software for the pro skippers, with different settings and algorithms. For example the skipper that used the B&G pilot in the last Fastnet, had 16 different codes and settings to choose from for different sea and wind conditions, which were the product of having B&G development team sailing his boat months prior to the race. NKE does EXACTLY the same.
Now to answer your question about how to choose a pilot:
1. The most important thing in the entire system is the RAM, it does not matter how accurate the rest of your system is without ram it does not work.
2. Integration, using the same protocol for instrument communication. NMEA is way too slow to sail to wind, UNLESS the only sentence you send to the pilot is one with the wind information.
3. A good compass, yes the gyro compasses do a great job reducing the washing machine effect, thus making course keeping a lot easier.
4. Lastly the RAM, did I mention that the ram is the most important component in your pilot system, spend your money here, and then you know you can trust it.
The ram is to a pilot what a speaker is to an audio system, you can have all kinds of amplifiers, and gismos but if the speakers can’t reproduce the sounds sent by the amplifiers then you just wasted all that money. Another good think to keep in mind is that ALL pilots that I have worked with follow the similar logic when sailing to a wind angle. By default all pilots sail to a heading ALL the time; but when sailing to a wind angle, the heading gets changed (different pilots update the heading at different intervals) as a result of comparing to compensate for wind direction changes, no magic there.
I have raced and used Raymarine, NKE and B&G pilots in pretty much every condition in the SAME boat looking for that pilot the “can sail better than I” but I am still looking for it, now I have 2 more pilots to test Nexus and Garmin. But for now if I were to rate pilot performance alone (i.e. not the instruments) I will rate Raymarine #1, with NKE and B&G a distant second and third. Yes, the NKE and B&G are better pilots but only if you get their support and have their engineers “fine” tuning and making all kinds of changes, but out of the box and with reasonable tuning, they are not.
A good reference point to compare pilots performance and algorithms is the amount of rudder movement, in similar conditions. So if you get a chance go out on boats with different pilots and get a feeling of how much rudder each of these need to use to keep the boat on the right place. A good “learning” algorithm will start with higher rudder movement after a tack or gybe, to then settle down in a lower rudder activity while being able to react to changing conditions.
Ben, and Henning
The Garmin heading sensor is based on the Airmar H2183 unit, and does have a 3 axis rate gyro.
I also don’t know any AP system that will continue to learn, after set up.
I have seen this happen several times, both with power and sail boats. In heavy seas, with some compasses, when the gimbal reaches the end of travel, often with a jolt, the compass is sometimes less than accurate. The system can either get incorrect data, or the data stops, ie the compass can’t easily turn at the maximum, or steeper angle of the gimbal travel, and the heading information doesn’t change. This can cause erratic behavior from pilots. The rate gyro (accelerometer) is supposed to smooth out the wild swinging of the compass in rough seas, and should provide a more stable heading data source, although I admit, I don’t exactly understand how this all happens.
The second scenario is a form of hysteresis. A gust, or wave catches the jib and the bow is abruptly swung. The system sees the swing, and applies opposite rudder, but sometimes a little late, or to aggressively, and the vessel yaws off in the other direction hard over, and the cycle repeats. This can also be caused by the system steering mechanism (linear drive or hydraulic pump) just not being able to cope with the forces involved. There is also notable lag in transmission of data in the 0183 format (4800 baud), at least by todays standards, which can contribute to the problem.
There are a couple of other things to consider here. The two big deals, from my viewpoint, in autopilot operation are gain (when the system makes a change, how aggressively do you want it to make the change), and response rate (sea state in many systems). This setting tells the system how often to make a change, ie once per second, or maybe once every three seconds. The rule of thumb is that the worse the sea conditions, the lower the response rate should be. In power boats operating in high seas, with a response rate set too high can actually be very dangerous, in sail boats less so, but it can be uncomfortable.
Henning, did the vessel behaved better after the sea state was set to 5-6, how rough was it, where were the waves coming from, and the height. I am assuming you were in the trough.
Another thing to consider, if you can, is to limit the autopilots range of rudder travel, ie set it to 20 degrees, instead of 45 degrees.
Modern APs do use some variance of fuzzy logic which helps them to be able to “make” desicions based on degress of “truth” instead of boolean logic.
This is how some pilots can increase and reduce gain and response.
a boolean pilot only knows of absolute truth (1) and absolute false (0), whereas a fuzzy logic pilot knows degrees of truth and false i.e. 0.1=almost false and 0.8 almost true.
If you meassure rudder movement, pich yaw and roll you can clearly see that while at the begining of a new tack rudder movement starts do diminish while yaw roll and pit stay fairly constant.
This does not mean that pilots can build a hughe database of knowledge, but their learning is more like a running average, standard deviation, and other bivariate distribution density functions that correlate events like yaw pitch and roll.
this is normal and simple math, the key is how to use these numbers.
Bill, Garmin sells a heading sensor that is “based on the Airmar H2183” (or simply is the H2183 ;-), but I don’t think it has anything to do with what’s in the CCU of the Garmin APs. That sphere looks similar to what Nautimatics developed for the original TR1 pilot, well before Airmar even got in the compass game.
Garmin doesn’t seem to specify what sensors are in that CCU, but clearly the pilot’s brain can use whatever is there, and probably at high speed. A lot of modern heading devices like the Airmar H2183 output rate-of-turn, pitch, and roll (and even heave in the case of the Furuno SC-30), besides for stabilized heading. I don’t know if any pilots make use of that extra information, but it strikes me that the more a well-coded processor knows about a boat’s steering habits in different states of motion, the smarter it can be about rudder commands.
Ben, the CCU (compass) is the course computer also. I will try to get some additional info from Garmin on the details.From a control viewpoint, the system has more inputs that most. It can, and wants to use tach inputs, and the shaft encoder allows for very precise control, especially with hydraulic system. The auto tunning is not always perfect for every boat, but all of the settings can individually tweaked, and I have always been able to get them to perform well. I also suspect that part of the autopilot technology they use is shared from their aircraft autopilot group, for example control of turn transition time/distance. I will dig, or will see if I can get one of the Garmin guys to log on. With good control, and data input, the rest is software.
More background on where the Garmin autopilots came from:
http://www.powerandmotoryacht.com/columns/electronicsc/0204electronics/
Good story Ben, it is certainly a thinking outside of the box autopilot system.
Bill, I think Garmin set up a remote office on the coast of Oregon so that Doug Ford and other members of his Nautamatic team could keep developing autopilots there, and also to get a base for testing all their marine gear.
John, thank you very much for all these hints. I bookmarked the page. Raymarine doesn’t go down too easy with me because of all those reports of problems with silently dropping to standby that I read covering a full decade of experience in all parts of the world. Did Jeanne Socrates not beach her boat because of this? I’m sure Raymarine must have the world’s best “no conseqential damages” disclaimer.
Is the X5 a completely new design? That is what I think it takes to get rid of a bug that’s been chased for a decade and not found. But I dont’t disqualify your information. We all know few things are as complicated as selecting marine electronics.
You mention the drive… It’s a linear hydraulic drive that came as a package and has served me well so far but never in really rough weather. The point is that I don’t entertain thoughts of crossing the atlantic under electric autopilot. It’s been done so I have read but only when packing at least one complete drive unit. Ours being a cruising boat, I think I will rather spend my money on a Hydrovane. It’s supposed to keep a good course even with weak following wind and it’s a separate rudder but I have slight doubts about it’s ability to absolutely and always prevent the boat from beging knocked off course by a big wave (comments, anyone?). The Hydrovane site suggests to address this by not locking the main rudder but to engage the electric AP set at absolute minimum sensitivity so it will only wake up if the vane’s rudder failed to correct the course.
I did notice Richard’s mention of Kobelt, though, and noted it in case mine ever breaks.
Bill, I think my problem is the course. When I saw the rocking horse video I thought “That’s me!” It wasn’t in any really bad weather, either. I wasn’t seasick and my wife was below with our daughter (she is tougher than me, our daughter only in her first year). Changing the seastate setting helped, I think, but I doubt that this is a complete fix. And what if we ever do get into bad weather?
So I think I will give the H2183 a try after making sure it will interface with the J300X. Dan Corcoran says it’s a good idea anyway.
As yet to be mentioned in this discussion is the importance of a proper installation. My very old Alpha Marine pilot did not work at all well as I originally had it set up. First I discovered that the computer control is very sensitive to having clean and stable 12 volt power, though it really consumes little. Then, by moving the compass three times I progressively got it to work better and better. The best location (on my 40 ft. sailboat) is near the cabin sole a few feet aft of the center of effort and near the centerline of the boat. It is close to a null point of pitch, roll and yaw and made a world of difference in pilot behavior. I believe the same would hold true for any brand today and, although the online installation manuals all are clear about mounting, I have found that many disappointed sailors simply do not have a proper autopilot installation. (Powerboats are maybe less sensitive to that.)
Now my Alpha pilot is nearly 30 years old and a definite candidate for replacement. Thank you, gentlemen, for your instructive comments.
My Simrad compass sensor, the one I’m complaining about so much, is mounted at the base of the mast support, below the waterline, about 10 inches from the cast iron keel and keel bolts – so in a somewhat similar position to Rob’s. Location may well be important but with a poor sensor it may not help enough, as in my case.
Someone had installed the air compressor for the horn about 5 inches from the sensor. I never tried blowing the horn while under autopilot but this may have given me a 90 degree course change. I moved the compressor during my first winter with the boat.
Generally I would like an area with less chances of someone storing luggage close to it which may have a mobile phone or such in it and this position is also close to the keel although that has most of the mass in a flattish bomb farther down.
I was thinking of the cabin roof just forward of the companionway hatch but this would obviously have more motion since farther away from the center of gravity.
Any thoughts?
My Simrad compass sensor, the one I’m complaining about so much, is mounted at the base of the mast support, below the waterline, about 10 inches from the cast iron keel and keel bolts – so in a somewhat similar position to Rob’s. Location may well be important but with a poor sensor it may not help enough, as in my case.
I would not be so quick to blame the sensor in this case. Here’s a quote from the Airmar H2183 installation instructions:
mount the sensor 1.2 m (4′) away from any structures or equipment that contains ferrous metals. Do not install in a steel vessel (magnetic hull)
I don’t know how far away the magnetic heading sensor should be from a cast iron keel, but 10″ is way too close.
Norse, I was blaming the sensor for overshooting course changes by the boat by a huge margin if the boat is rolling and pitching more than just a little and I continue to blame it as this will have nothing to do with deviation.
I also see up to 10 degrees of compass error when compared to both my binnacle compasses but this may be due to the keel or not ever doing a compensation so I didn’t blame it for pointing in the wrong direction.
So, should we then agree on the under the cabin roof foward of the companionway hatch? This would be 6 or 7 feet from the center of gravity but farthest from large masses of metal and unlikely to have a mobile phone placed next to it.
Henning, I agree with Norse, that if the compass is mounted that close to a cast iron hull, its performance will be affected. It may be that, and I am just theorizing, that if the metal is directly under the compass, the compass may not be adversely affected, until the compass magnets start to tip with vessel pitch and roll, and then the effect on the compass could be substantial. It would be better to get it away from the cast iron keel, period. I would worry less about the CG than several tons of ferrous metal
Ben or others. Need some help and advice, maybe someone can react on it.
I’m thinking of an complete Garmin configuration on my new sailing yacht (A Grand Soleil 46) coming begin 2011.
I have the next idea:
Autopilot GHP 12 (I’m glad they came with it right now – even it’s new / maybe not totally developed)
CHC 10 Autopilot control unit
CHC 10 Remote autopilot control unit
Dept/speed – Thru Hull Smart Transducer NMEA 2000
2x GMI 10
AIS 600
VHF 200 radio and external GHS10 Handset
GWS 10 Wind sensor
and this is special:
2x GPSMAP 720
I want 2 small plotters near the double steering wheels.
The GPS 720′ s are nice, small, not so deep (not so many space for the mainsail-rope)
I know that they are NOT network MFD.
But they suggest that they will work on a NMEA 2K network without sharing maps.
So I have to buy 2 pair of maps.
Questions.
1 – Will it be possible to use the autopilot from the GPS 720 and will there be any other problem in this configuration?
2 – Can I complete my system with an another windsensor like Raymarine or Simrad?
Why do I want that. The GMI10 is nice but the winddisplay is in some situations (Sun/wide angle) not so easy to read.
An analog Wind display like the Raymarine ST60 plus are sharp/fast and accurate in displaying every windshift and readable in every situation.
So I want to complet the system with 2 wind instrumens and a close haulded instrument.
3 – Will this work with the autopilot with the option windsteering?
André (The Netherlands)
Andre, mixing instrumet feeds for an autopilot is not recommended when doing over the older NMEA protocol. Also i would not agree with your statment about the accuracy of the Raymarine wind display. Wind instruments are Raymarine’s weakest point. I docummented (and provided the data to Raymarine) wind direction errors of over 10 degress due to a bug in their software. now add the very slow NMEA 0183 transmition rates and you will be eating huge shifts which is ok if you do not race the boat.
I would either go all raymarine instruments and Garmin plotters, or all garmin. Have you looked at Nexus instruments? they are a step better in calibration and accuracy than the Raymarine and their pilot is as good or a bit better than Raymarine’s. In some cases the Nexus intrumets are cheaper (i.e. not always) in price than Raymarine but Nexus significantly supperior. I would recommend you take a look at them.
another thing to keep in mind is that the Garmin pilot is new so it will have bugs, and pilot bugs/ problems as a general rule difficult to document thus getting a fix.
If you need more help you can reach me at [email protected].
Regards
John wouldn’t agree re nexus you see a lot of older nexus with displays damaged by moisture or actual water ingress. I am not impressed by silva gear in general.
Dave
Maybe I wasn’t clear in my explanation of the problem.
I didn’t mean with analog NMEA 0183 but I mean an instrumentdisplay /instrumentpanel with a pointer (sorry I don’t know the english word for it).
Like the Raymarine st60+Wind or Simrad IS20Wind
Hi André,
Your system will be NMEA 2000 based. Great idea.
1. I don’t know and the situation may change with new GPSMAP 720 software.
2. Adding analogue wind displays.
Raymarine only has an analogue wind display that works with it’s own wand, as it needs to be plugged in directly, and that instrument (ST60+) needs a separate Seatalk (1) Seatalk2 (=NMEA2000) or Seatalk NMEA0183 plus a NMEA0183 NMEA2000 box. So I think the Raymarine solution is out.
The Simrad IS20 Wind should work with both a Simrad IS20 Wind Wand and anything else that provides NMEA 2000 wind such as the Garmin wand, or an Airmar PB200. All The IS20 Wind is driven by a stepper motor, so it is really digital in nature & won’t spin at much more than 45 degrees per second. I will verify that I can get my IS20 wind display to show wind from my Airmar PB200 next week. If that works it will work with the Garmin version as well.
A third option is a Furuno FI-50 display.
3. I see no reason why wind steering wouldn’t work with the Garmin AP and a non-Garmin wind instrument, it certainly works on my Simrad AC42 / Airmar PB200 combo. Again NMEA 2000 for Wind is just a single PGN that has little room for interpretation errors between brands.
Are you the André I happen to know in Breskens?
Here is some more input on APs, and in particular heading sensors.
– Russ recently ripped out his entire 2 year old Furuno auto pilot and replaced it with a Raymarine one. He’ll have the full details but as I recall he never got the Furuno to work with the hydraulic ram properly. Whether this is to be blamed on Furuno or on the ram was unclear. He went back to something he had good experience with on his previous boat.
– Then he had further equipment failure with the AP, where the ram mount wasn’t strong enough.
(Russ, please, correct me if I’m wrong but you seem to be sailing or otherwise engaged!)
– I used to have a full (1999 vintage) Raymarine system, the AP was ST6000, computer was “100” (yeah old), an electric Type-1 ram and I later added a separate rate gyro when I added radar overlay. Steering was pretty good on our 39′ sailyacht, following seas however would show quite a lot of steering (response high) or some course deviation (auto sea state on). The AP itself never gave any issues. The rate gyro was broken just outside of warranty after 3 years. I removed it, and didn’t find the steering to be much worse actually. This was with an old computer though that had an analogue input from the rate gyro.
– I now have a Simrad AC42 / AP24 / RC42 system with a very fat hydraulic ram and the largest Simrad pump on a 56′ sailing yacht. Steering is amazing. Very little ‘wallowing’ where the system continuously makes small adjustments. I think the system does less “auto sea state” variation than the Raymarine, maybe even non. What it does do is automatically or manually change it settings based on speed. You can completely tune how it should work for both below and above a treshold speed. I also like the interface on the AP24 much better than my old ST6000. More features, more capabilities.
The weakest link in my case is the compass. I’ve got two compass sources; a Simrad RC42 rate gyro and an Airmar PB200. The PB200 is mounted at about 4 m above the sea on an antenna rail at very rear, way off from the center of gravity. This works OK with flat water but is not great in big seas. The RC42 is harder to calibrate as it is inside (magnetic influence from ‘stuff’) but keeps better course. I also found out last week (she’s still very new) that if I use any heavy electronics like the bowthruster or anchor winch or ballast pump that the heading changes 60 ° or more. Finding a better place inside that (a) is nearer COG than the PB200 (b) not magnetically influenced and (c) can be reached within 6 m from an existing Simnet joiner will take some more head scratching.
So, what does this mean for others, IMHO:
1) Go ‘oversized’ on the power parts of your solution.
2) Installation and integration of the computer, pump and ram is key. There are combinations that don’t work well.
3) Software side integration on NMEA 2000 generally works well.
4) Carefully choose compass location.
5) Manufacturers do seem to make progress, newer systems work better.
Kees said: The RC42 is harder to calibrate as it is inside (magnetic influence from ‘stuff’) but keeps better course. I also found out last week (she’s still very new) that if I use any heavy electronics like the bowthruster or anchor winch or ballast pump that the heading changes 60 ° or more.
The bowthruster and the anchor winch at least must be at some distance from the compass, so the magnetic disturbance must be from the power cables being near to the compass. How close are they? Are the positive and negative cables not close together?
Thnx Kees. Good help. I have the time for my configuration so I will keep looking around on this site for new stuff till december or so.
Also wondering what will be new on the Mets this year.
Hi Norse,
The current location is 40 cm above one of two house battery banks, so it’s quite logical that this happens, as near a battery there is no way that there is going to be a neutral field. Shame on the installer! Eh… that happens to be myself.
Kees did an excellent summary above. Remember, on a sailboat you are not only pushing the rudder around, you are also back driving the steering system, and its associated gear ratio to do this. The next time your vessel is hauled, push on the rudder, and see how much effort it takes to move it. You will be surprised. Bigger is better, and faster.
It’s almost comical – the more I read the less confident I feel when it comes to answering, “what is the best AP/Instrument/MFD/AIS-B system for me’. Just when I think I’ve made the decision, I hear contrary feedback. Not just here – everywhere! But I consider this to be the most reliable of sources so will truly appreciate a sanity check.
In this case, for a 46′, 32,000# aluminum ocean racer being rebuilt to do primarily short-handed New England coastal cruising with an offshore, crewed distance race each year.
I’ve pretty much eliminated B&G and NKE from contention because if I’m honest with myself, I’m a ‘plug & play’ kind of guy and don’t enjoy geekery with constant tweeking. Out-of-the box ease of use, reliability, replacement parts and locally available service count. Plus, my racing isn’t fanatical. I can live with the 95th percentile of performance. Basic requirements are simple: wind/speed/depth/apparent wind and an AP control head. The more integration on the helm MFD, the better.
That leaves Raymarine, Simrad or now Garmin for a turn key solution, each with perceived instrumentation weaknesses. Presuming the beefiest AP/ram and MFD (NSE, E-Series) from any of these vendors, where/how does it makes sense to substitute best-of-breed instrumentation into the equation without compromising the benefits of integration – particularly with MFD/AP control?
For instance, if Raymarine wind sensitivity is a weak point. Can the system be improved by substituting an Airmar 2000? Or can Nexus instruments be used instead without losing the benefits of an integrated MFD/AP at the helm?
And then there’s radar. Broadband is appealing to find close-in nav aids, lobster pots and slips in the fog; weather systems beyond it’s 6+ mile range will be picked up by XM/Sirius and I want AIS-B. So the 20-mile range of HD might not be important. This seems to give the Simrad scenario an edge. And the NSE is arguably a (slightly?) better MFD than the Ray E-series. But I’m still not sold on Simrad instruments.
Bottom line, if I want the most elegant, robust system possible for this boat and intended use – with the fewest moving parts – on a swamp yankee budget, is there a brand/combo that seems to have an edge in this scenario???
Thanks in advance for opinions.
Well..I went with a full Simrad system except for the autopilot which is a Raymarine X-5 wheel.I have chain/cable steering so the X-5 was the simplest to instal.It would be nice to have all one brand but alas that is not always the case.
So I have no integration between my MFD and the autopilot.The X-5 has a nmea2000 port but Raymarine does not recommend attaching it to any other 2000 backbone because of Seatalk .I gather there might be some illegal sentences spit out or something.
Yeah and if I do add wind it will be Airmar not Raymarine transducer.
Hi Michael,
46′, 32,000# aluminum ocean racer – you need a beefy ram but not the biggest (at least from Ray/Simrad) as they can go much bigger. Choosing one or two sizes up makes sense but anything beyond will just waste $ and electricity.
The more integration on the helm MFD, the better. – AIS display on MFD is a given, radar only works same mfg., AP control is a Simrad USP at this moment. So that means getting the MFD, radar and AP from the same brand. Plus AP control head if you desire/need a separate one.
You can mix and match sensors and displays to the above system as long as you make sure you can calibrate the sensor. For most that means at least one display or MFD of the same brand. The Airmar PB200 will allow calibration over an Actisense NGT-1 as well as the Airmar PC interface.
I’m not sure of the look you are after but on a “new classic” I’d put in some B&G analogues as these are really NMEA2000/Simnet display units and have no need for a B&G computer. That would give you a retro look with modern networking underneath. (Hm, this might not mesh with your ‘fewest moving parts’ requirement…)
Hats off to you, Michael. Being confused about “best AP/Instrument/MFD/AIS-B system” is an informed and realistic point of view! And trying to factor in your own specific needs is the best way to work through the confusion.
And sorry in advance as I’m going to add to your confusion tomorrow, with dope on new sailor-specific version of the Simrad NSE from B&G:
http://www.bandg.com/News/BG-Launch-New-Multifunction-Display-Units-Dedicated-to-Sailing/
Kees – thanks for the idea of the B&G analogs! In deed, this boat was originally commissioned back in ’71 with B&G, including dual (port/stbd) mercury-controlled depth/speed sensors – a capability which only B&G seems to offer today, albeit in non-toxic format!
Ben – I spoke with the B&G rep about the B&G MFD. Final specs are still TBD but at this point it appears to be a $500 upcharge over the NSE, has a few sailing-oriented attributes (i.e. layline) but unlike the NSE, will lack AP integration.
Candidly, I love the look and durability of the B&G digital displays. But given that I don’t need the highest performing computer software, that there seems to be negligable difference between the Simrad and B&G AP’s and that my instruments will be under a protective dodger….
That actually looks like a Jefa linear drive unit (the LD100), and even has a jefa sticker on it (which you can barely make out in the blowup). That would make it an electric drive, not a hydraulic one. Could someone verify this?
Sorry if my entry wasn’t clear, Herb. The new Garmin GHP 12 is definitely not for hydraulic steering systems, while the original GHP 10 only works with hydraulic steering.
I think you’re probably right that Garmin sourced its linear drives from Jefa, but suspect they are models especially built for Garmin. Look like good drive technology:
http://www.jefa.com/steering/products/drives/linear.htm
Garmin also makes it confusing by having “pump” on their control box output!
In the blow-up version of the picture you can definitely make out the Jefa sticker/logo on the drive. They probably are specially made for Garmin with an internal rudder position sensor. It would make sense to get a good drive unit (Simrad/B&G rebrands these Jefa units also) and avoid that development cost.
Is there any news about this autopilot?
In september a lot of press and blogs but now I don’t hear anything about this anymore.
Does someone had already experiences with it?
Is there somewhere a test of review?
I heard some (garmin?) ships sail with it.
Also there is no info about system B drive unit.
The following is a response I received from Garmin on December 8th:
“Thank you for contacting Garmin International. I will be more than happy to help. We personally here in the marine department got the product announcement last month (??). There are no technical or supply issues. The product will be available in the 1st quarter (??). I apologize if things aren’t moving as fast as you would like them to, however marketing, distribution to dealers, and preparation takes time. Also safety is our first priority, therefore we like to test it vigorously to ensure proper function of the unit. We are not in the business of rushing out unsafe products. We appreciate your patience.”
Sounds like they have serious launch issues to me.
Sorry, I could have been clearer in this entry. Garmin announced the GHP 12 in September with planned delivery in Q1, 2011. The latter bit of information used to be on the product page, I’m pretty sure, but isn’t anymore for some reason. It’s typical of Garmin and many other manufacturers to announce a product well before they ship it. Sometimes they don’t make the ship date, to be sure, but I think this pilot is still on schedule.
A Garmin dealer tells me that the GHP 12 is “currently scheduled to start shipping in the second week of March.”
I’ ve installed the GHP 12 last week on my new GS 46.
It was easy to connect and I used a JEFA DU-DD1 -12 drive unit.
Garmins Drive unit A was to small and for the Drive B there were no specs.
So I decided to buy a Jefa. Jefa is known as a good and reliable drive manufacturer for a lot of Brands (Even for Garmin).
What for me was strange in the Garmin GHP 12 configuration is that it is N2K but not completely.
I installed it but then I saw the message on the GHC10 display that there was NO connection between the GHC10 and the CCU12….
After securely reading the manual I discovered that I also have to connect some of the NMEA0183 wires to the GHC10.
After that al worked fine but I don’t think that this is a nice (N2K) solution.
I didn’t do the seatrials because the boat isn’t ready yet.
When I have done that I will give more comments.
Thank you very much, André, but I’m surprised. I thought Garmin designed this system for exclusive use with the two drives it sells. Did you talk with Garmin tech support about using the Jefa?
I am still waiting for my GHP 12 but am told by Garmin folks that it has recently shipped (they claim their supply deal with Bavaria Yachts delayed NA introduction). I was interested in using the Jefa DD1 drive and have been told by Jefa that it requires a modification to the rudder sensor indicator. The LD100 drive was modified by Jefa for Garmin use to incorporate a rudder reference indicator. Apparently the DD1 can also be modified to incorprate the same unit. The last I looked, there was no install manual posted on the Garmin website, so hard to comment on the wiring. Did you use Garmin connectors, or at least N2K connectors, to hook up the CCU?
Ben,
I’ve been told by a Garmin employee that their drives are actually made by Jefa…
Ben, Jefa supplies the drives to Garmin. Their modified LD100 is the Garmin “Class A” drive. I suspect that one of Jefa’s more powerful direct drive units will become Garmin’s “Class B” drive. Apparently there must be some unique rudder reference sending unit which has been incorporated that sends signals to the Garmin CCU. BTW, Simrad also sources drive units from Jefa (and others, including Octopus).
In the GHP10 system, the CCU is connected to the ECU with a Garmin cable (Also contains alarm wirng et al). The CCU uses an additional standard N2K cable to connect to the backbone. I have not seen the GPH12 yet either, But I suspect the wiring configuration will be similar.
-Ben: Yes I talked with the sales and tech support (UK).
My problem was that the A was to small and they had no information about the B. So I wanted to make a decision. Also I heard that the B drive was Hydraulic and that is not so sensitive steering on a performance yacht. An another problem is that you lose some energy in a Hydraulic system (see the explanation on the Jefa site: http://www.jefa.com/steering/steering.htm (q/a 3).
As well as Garmin as Jefa were very helpful in this ‘project’
Jefa made it plug and play.
-Starkindler: Yes JEFA made it plug and play, cables/connectors included for me. They were not sure about the clutch, if it should work proper so they delivered also an relais.
Af far till now (I didn’t do the sea-trial yet) it is not necessary.
I was in contact with Garmin and Jefa for a long time so maybe that is why I have one of the first autopilots.
Bill, The GHC10 has the N2K cable to connect to the CCU12 except the alarm (2 wires from the NMEA0183 cable are used for the buzzer – and one yellow wire for the final connection to the CCU12) Without is doesn’t work.
For me it is strange that in a totally N2K network this is needed.
Not the most clean solution but it works al well till so far.
Andre, the yellow wire signals a relay to tell the AP system (ECU) to turn on, when the MFD’s are fired up. This bit me the first time I installed one. In the drawing of the wiring (GHP10 page 6), there is a small note next to the yellow wire that refers you to another page (GHP10 page 29). This is not a sterling piece of documentation, and the wiring diagram should have included this connections. I don’t think the other wiring is NMEA 0183 at all, but is instead aux wiring for alarms, analog tachs, shadow drives et al. As you have figured out, no yellow wire connected, no system operation, because it has not been told to “Turn On, not Drop Out” (sorry the summer of love 1967 made me do it). In the Garmin marine network, the network itself tells the connected devices to turn on, ie GSD22, radar et al. Maybe Ben knows if the N2K network has a PGN that will do the same thing, I suspect not since I have to turn on on GMI10’s and other N2K driven displays.
Yes, the GHP 12 can be used with third party drives. The manual explains how to set them up. I’d suggest a rudder position transducer would probably be very helpful in this case. From the manual it would also seem a 3rd party sensor would be suitable.
Thanks, Alan. I don’t know how I became so sure that the GHP 12 would only work with Garmin’s drives — though I vaguely remember asking Garmin directly — but the install manual certainly indicates that it could be set up with lots of existing drives. I added a PS to the entry so as to avoid confusing more readers, and included a link to the manual download page: http://goo.gl/j6fkc
After 1,5 weeks sailing in the Mediterranean Sea with the GHP 12 installed on my new GS 46, I’m satisfied with this autopilot.
It was easy to connect and I used a JEFA DU-DD1 -12 drive unit.
The drive is extremely silent. Works al without problems. Efficient power use.
(Garmins Drive unit A was to small and for the Drive B there were no specs. and I don’t like hydraulic autopilots if not really neccessarry – to much powerconsumption)
So I decided to buy a Jefa. Jefa is known as a good and reliable drive manufacturer for a lot of Brands (Even for Garmin).
The seatrials were easy. The Garmin Wizzard takes you trough the whole process.
I sailed in winds from 1 to 16 knots.
Seastate was without waves or with waves from 1 meter. Not so High but it worked well till so far.
One time I had a strange experience; automatically tacking by autopilot (90degrees – which is a preset of the system) in a wind of 3 – 4 knots. The autopilot tacked / made a course change as expected but kept the rudder in the (SB) maximum angle. So I was turning a complete 360…
I thought that there was a failure in the system. But after thinking about this situation I think that the wind was to low to tack automatically, the windvane was keeping his position by the wind made by the turn of the boat. Maybe some have the same experiences?
All other features worked well. Windvane steering etc.
I will keep you updated when there will be problems or when I have more experiences in heavier situations.
Till now I’m happy with the system.
Last July, Garmin released a software update for the GHP 12 (v. 2.3). This update allows powerboats with solenoid steering systems, cable-actuated steering systems and 3rd party hydraulic pumps to use the GHP 12.
I just installed the GHP 12 after upgrading all my instruments to Garmin on my ’97 Caliber 40LRC. I used my existing Simrad/Robertson HLD2000L drive which works perfectly with the GHP 12. For those wanting to use this drive, it uses European wiring standards of Brown(+) and Blue(N). The clutch solenoid voltage is 12v.
The system worked flawlessly while motoring for an hour and then sailing for 2 in 15kts. I even trimmed the boat with a lot of weather helm and the pilot held it perfectly in some mixed chop. Something my previous Robertson AP had trouble doing. The compass was suspect but a replacement was nearly as much as a new Garmin unit. We also tested sailing by wind angle but did not do any tacks or gybes yet. I will test those in lighter conditions.
I have yet to connect my 3206 via NMEA 0183 and test it’s ability to steer to a waypoint.
BTW, I used a Raymarine rudder position feedback sensor with Garmin’s cable adapter. Garmin tech support indicated that while the GHC10 would show rudder position, the data would not be available to my GMI10 MFDs. They were wrong. I can easily display an analog rudder position graphic on the GMI10.
The installation was very straightforward although the alarm/power on pigtail from the CCU should come off the opposite end of the cable to make routing easier. Once powered up the GHC10 walked me through the initial setup which includes selecting the non-Garmin drive unit. The sea initialization was also very easy to do.
Warning, there are many typos and incorrect wiring info in the Garmin Docs which are very limited to begin with. If you use a field installable NMEA2000 connector, wire it according to the back of the connector, not what the documentation says.
The only feature this AP does not have that I used to use often on my Ray S1 and Robertson AP300 is the dodge feature which makes it easy to temporarily alter course to steer around something and then resume you original course. On the Garmin you either have to step turn around it our go to standby and remember what your original course was.
Tim R.
http://www.tkronaboat.com
John,
Its been a number of years since this post. Can you tell me if you would rate autopilots different today? My understanding is Garmin has made some significant progress in their autopilot technology.