
Pilot Line autopilot, unfinished business
 I hesitate to write about a marine technology that isn’t an actual product yet, especially when I don’t understand it! However, there may be a story here worth telling. At the end of his career, a very experienced engineer came up with what he believes to be a superior autopilot technology, but it will never become available to boaters unless someone new carries the project forward…
I hesitate to write about a marine technology that isn’t an actual product yet, especially when I don’t understand it! However, there may be a story here worth telling. At the end of his career, a very experienced engineer came up with what he believes to be a superior autopilot technology, but it will never become available to boaters unless someone new carries the project forward…
 I first heard about Pilot Line a few years ago when William Pease and his family contracted a guy quite experienced in the current marine electronics industry to market Pease’s 2012 patent. That person is quite knowledgeable about autopilots, and was quite enthusiastic about Pilot Line, but he still couldn’t get a non-engineer like me to comprehend what makes the system special. I decided to wait for sea trial results, then he apparently lost interest, and I forgot about the whole thing until today when William’s daughter Leone got in touch. The story now is not so much about selling a patent as helping a 94-year-old dad see his last invention at least evaluated by fellow engineers who could possibly use it.
I first heard about Pilot Line a few years ago when William Pease and his family contracted a guy quite experienced in the current marine electronics industry to market Pease’s 2012 patent. That person is quite knowledgeable about autopilots, and was quite enthusiastic about Pilot Line, but he still couldn’t get a non-engineer like me to comprehend what makes the system special. I decided to wait for sea trial results, then he apparently lost interest, and I forgot about the whole thing until today when William’s daughter Leone got in touch. The story now is not so much about selling a patent as helping a 94-year-old dad see his last invention at least evaluated by fellow engineers who could possibly use it.
 And it only takes a glance at William’s partial resume above to see that he’s eminently qualified to design autopilots, even reinvent them. But getting the attention of active autopilot engineers is not easy, even via Leone’s Panbo Classified ad (though a surprising number of sales have resulted from that largely dormant effort). I have no idea if the Pilot Line algorithms could benefit the latest systems from Raymarine, Garmin, Simrad, or Furuno, but I understand that a prototype is up and running on the sailboat seen below with Bill Pease and some of his family. Furthermore, they say the system could also make sense as a new PC-based autopilot. I hope that interested engineers will contact Leone Johnson and give Pilot Line a good look.
And it only takes a glance at William’s partial resume above to see that he’s eminently qualified to design autopilots, even reinvent them. But getting the attention of active autopilot engineers is not easy, even via Leone’s Panbo Classified ad (though a surprising number of sales have resulted from that largely dormant effort). I have no idea if the Pilot Line algorithms could benefit the latest systems from Raymarine, Garmin, Simrad, or Furuno, but I understand that a prototype is up and running on the sailboat seen below with Bill Pease and some of his family. Furthermore, they say the system could also make sense as a new PC-based autopilot. I hope that interested engineers will contact Leone Johnson and give Pilot Line a good look.











Generally speaking, selling patents is really hard. First, the claims (the numbered paragraphs at the end of the patent) have to be really well written and need to cover what a potential infringer does or is going to do before the patent will be worth much. Second, if a company simply wanted to use a technology like what is described in the patent, its engineers will most likely just learn from the patent and then make a new product that does not infringe on the patent’s claims and send it to market (this is called “designing around” the patent) all without buying the patent. Third, even if the technology in Mr. Pease’s patent was great, to sell this to a premier marine electronics company would require a lead engineer at that company to admit that this is better than what his/her team has developed and suggest that this technology be used. Such an admission would naturally make one nervous about one’s job (notwithstanding Mr. Pease’s impressive creds).
To the extent that this is not the present strategy, rather than trying to sell the patent, I would find a trusted person to take this idea (as well as Mr. Pease’s know how) and move the idea forward as a prototype and then product. Could this be done as a black box which communicates with existing autopilot hardware (actuators) over NMEA 2000? That is all beyond me.
To Mr. Pease’s family: Make sure you pay the maintenance fee that is due starting September 11, 2015. It will be $800 or $400 (if you can establish micro entity). Talk to your attorney or look at: https://ramps.uspto.gov/eram/patentMaintFees.do
Great insight…..there is a prototype already, still needs work, but enough that a new entrant would have a whopping head start and save a bundle in development costs, or a participant that is private labeling could better control their own destiny, or a dealer consortium could offer a less expensive alternative with more functionality. all are options. designing around this type of control law requires a lot of knowledge not readily available in the market.
I’m no patent expert, so please correct me if I’m wrong, but looking at the patent, it looks like every autopilot hooked up to a chartplotter since rate gyros were used? Is the only point of difference the fact the whole thing would be in the one box? Isn’t the new Lowrance autopilot just that?
Most of the provided equations are basic but make sense, except for the one in paragraph 34, which seems to be a reshuffled version of the differentiated equation from 32, except it doesn’t take the ships heading into account, but does include the rudder command?
Am I reading it correctly that “Pilot line” is exactly the same as desired heading in any other autopilot?
Ahhhh I just had a shower and thought about it, ignore my comments about 34/32 they do make sense. Shouldn’t have hurried through them.
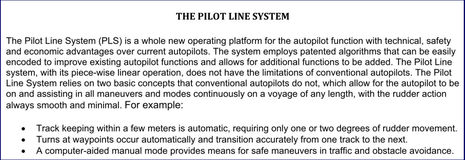
Robert, would be glad to have you speak to inventor if you have more questions and thoughts as you seem to be understanding of technology and thoughtful. please email me and I will start a conversation. I am the daughter and a market researcher by trade, but my understanding from my dad is that the piecewise continuous operation, the triad loops and the feedback are the differentiating factor allowing for stable feedback cycles and better smooth and minimal rudder action with minimal error. would like to have him talk to a technical person to sharpen our teeth on marketing message.
ugh. please dont renew this patent. if you really want to see this technology out there let the patent expire and then everyone can use it freely. then you might half a chance of getting this into actual products.
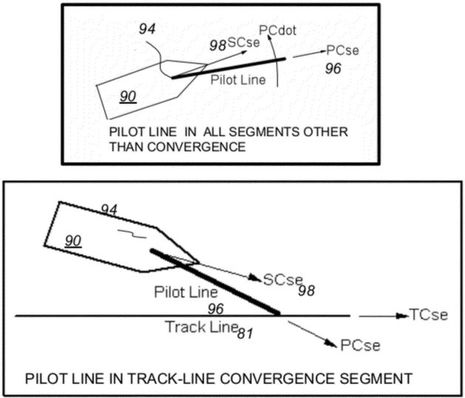
The direction of the Pilot Line is always the desired heading. Depending on the maneuver being programmed, the direction can have different meanings. In a turn, the direction changes at rate and represents the heading during the turn. On a straightaway, the direction may mean the compass reading, but it also could mean the direction from one waypoint to the next relative to the bottom in the presence of wind and currents. The programming method is made up of well defined piecewise linear segments which define both the direction and the rate of turn of the Pilot Line.
If you ever need a blue water sailboat for testing I would be more then willing to assist with feedback on performance and features. I’m located in the Chesapeake near Annapolis.
Hi,
I think this invention could be applied well in one specific autopilot implementation, the dynamic positioning.
Google it up.
Although the DP algorithm is relatively simple to implement in any AP, almost no main stream vendor does it. Only the high-end vendors are bothered with it, and their implementations are not that elegant, more focused on producing expensive product and thus implying value.
Think about the value of a smooth DP algorithm that could be added to any AP that drives twin-engined boat (cat or mono) – say $300 software add-on that could allow one to anchor over the shallow coral field, “look-ma-no-anchor” style.
Still is not going to be an easy ride for the inventor. though…
thank you email me more details as we are in test mode now….
Dynamic positioning is a whole other market and a whole other navigation problem. It would be big deviation from our current efforts.
Our bread-and-butter is navigating between waypoints by controlling steering/rudder commands for smooth and minimal rudder action in all conditions and for all maneuvers, not holding a fixed position using differential thrust of twin propellers which is the gist of Dynamic Positioning. If someone were to acquire the Pilot Line System they could develop an autopilot and then add on their DP system to form a multifunction product.
Our goal is to sell the patent and prototype, the future product direction is up to the owner.
The Inventor elaborated on my comment to add that the patent owner could use the Pilot Line System to design a superior autopilot and part of the patent could be used to add in Dynamic Positioning thus creating a new patentable hybrid product.
Happy to report that the Pilot Line autopilot is being introduced at the NMEA Conference right now. Here’s the press release:
https://panbo.com/images16/NeySea_Pilot_Line_System_press_release_9-26-2017.pdf