
Ultrasonic Weather Wars, w/ Raymarine as Switzerland
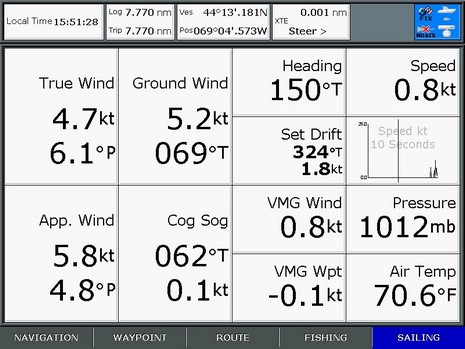
This example will be less funky once I get this whole test rig on the water, but still that’s an impressive screen shot. All that data is coming from, or calculated using, the NMEA 2000 output of Maretron’s weather station, compass, GPS, and water speed/depth sensor. The simulated ‘boat’ is underway but almost standing still (SOG = 0.1 kt) though there’s 0.8 kt of water going by the hull (me flicking the paddle wheel). True Wind then—sometimes called True Relative to Boat—is Apparent adjusted for Speed Through Water and Heading, and Ground Wind (sometimes called True!) is Apparent adjusted for COG/SOG. (A more thorough discussion of True Wind might be in order).
And—yes, contrary to yesterday’s post—there’s Barometric Pressure and Air Temp from the WSO100. It turned out that the E Series doesn’t recognize the standard NMEA 2000 “Environmental” PGN, but will display an alternate PGN that can be turned on in the WSO. This sounds like the screwy stuff that happens with NMEA 0183, and sure enough the E also has an issue with the 0183 “Environmental” sentence, which apparently is marked “do not use” in the NMEA handbook. But Airmar says it’s the only message available for pressure, temp, and relative humidity.
At any rate, the data on the screen below is all coming from Airmar’s all-in-one ultrasonic weather station (and will be joined by pressure, etc. when Raymarine does another code release). True Wind and Set/Drift aren’t calculated because there is no source of Boat Speed, though that would be easy by wiring a speed/depth Smart Sensor into the Weather Station’s Combiner box (multiplexer). Some other day I’ll discuss comparative accuracy, value, etc., but for now I think it’s impressive that the E Series (and C) can interface with both these super sensor systems. The screen shots also illustrate the vastly improved data window control that’s come to the C and E. You can customize the five preset panels pretty extensively (blame me for the asymmetrical graph cells), and use the panels full, half, or quarter screen on any given page. Well done Raymarine, Maretron, and Airmar!











I fail to see the utility of the Ground Wind when underway and when not underway it should be the same as the Apparent and True wind (assuming the GPS isn’t giving those annoying false readings when actually stopped). I believe this is another case of a landlubber engineer including something just because it can be calculated.
What about Wpt VMG being based on boat speed and not SOG? This is how Raytech works… I don’t know about you but when was the last time a way point was moving with the water.
Ground wind is more useful to me thatn Wpt VMG that is based on boat speed not SOG.
David, I looked in the RayTech manual and it defines VMG as:
“The boat�s speed towards or away from the TWD (True Wind Direction), used to measure performance relative to upwind/downwind targets.”
There’s mention of another value called VMC, Velocity Made good on Course, that may be what you’re looking for?
Hmmmm…and note in the top screen shot that the E 120 can calculate both “VMG Wind” and “VMG Waypoint”. This IS a complicated subject.
What I would really like to see is the ability to calculate whatever metric I wish, perhaps something that the manufacturer didn’t even
think of. A small programming interface (kind of like an exel interface) would allow you to truly customize what is calculated. Of course, you would still have a base set of common calculations. After all, the myriad calculations possible are based on just a couple real measurements. But then the manufacturers couldn’t brag about how many things their product tells you…doh!
Until the manufacturers allow this, I’m perfectly happy with “landlubber engineering.” They can calculate as many things as they can think of and I will just choose to display what is useful to me. It is simple enough for the manufacturers to provide different “packages” of metrics like a basic, advanced, racing, cruising, etc. in case you didn’t feel like wading through all the possibilities to customize your display.
Ben: In my opinion, the manufacturers MAKE this a complicated subject. It doesn’t need to be.
The Maretron display (and I believe the Raymarine E-Series) provides wind speed and direction three different ways depending on your application:
1) Apparent (measured) – This is the wind speed and direction relative to the wind sensor. This is what the wind sensor actually measures. If you were traveling 5 knots with the wind directly behind you blowing at 5 knots, the apparent wind would read 0 knots.
2) True Vessel Referenced (calculated) – This is the speed and direction of the wind relative to the vessel with the vessel’s speed through water subtracted from the apparent wind. In the previous example with a vessel speed of 5 knots and a tail wind of 5 knots, the true vessel referenced wind would read 5 knots. Sailors use true vessel referenced wind, as they are interested in wind speed and direction independent of the vessel�s speed through water. Sail trim is optimized by observing the vessels polar diagram, which plots anticipated vessel speed versus true (vessel referenced) wind speed and direction.
3) True Ground Referenced (calculated) – This is the wind speed and direction of the wind relative to true north. This is useful when you are concerned with the weather and you are interested in determining the movement of fronts and/or high and low pressures.
Lastly, Maretron makes an NMEA 2000 to USB gateway (USB100) where you can bring measured information from an array of sensors into a computer and as Robert suggest, calculate anything you wish.
What sort of damping options are available to the user with these data calculations?
Since many of the metrics are varying quite a lot, you often need to average or dampen some or all of the sensor input and or the resultant value to be able to make sense… or else your numbers are constantly changing.
This is especially true for a sail boat hand steered through “large enough” seas to push the bow or stern around a bit and wind that many be oscillating, variable or changing as the vessel move through the water. Not only that GPS fixes can actually be “jumping around a bit as well.. so using this as some sort of reference for speed can also skew the resultant data even on a large stable vessel.
My B&G Hornet series (quite old) have user settable damping and averaging to “quiet down” the data displays.
The Raymarine C80 has no provision for damping as far as I know.
What say you?
Jef
sv Shiva
Contest 36s
Jef,
The Maretron wind/weather station (WSO100) has a programmable wind speed damping period that can be set anywhere between 0.1 and 5 seconds. As you suggest, this filters wind speed and direction to provide a more stable display, although at the expense of slightly delayed wind shifts.
Rick,
That certainly would help, but I would argue that one should have the ability to adjust the damping on on sensor inputs to smooth them out.
One could use different values for different conditions.. even saved as a “set” of values.
Moving at slow speeds of a sailboat this could be significant. How about it?
Jef
sv Shiva
Contest 36s
Ben, thanks for the VMC idea…
I just checked the manual and they mention this:
“The Vmc plot screen displays the Velocity Made good on Course towards a specific
mark or target. Although similar in concept to VMG, Vmc is equal to VMG only when
the bearing to the mark and wind direction are identical. ”
Which sounds to me that both use boat speed and not SOG to calculate VMC or WptVMG.
Does these ultrasonic sensors have a noticeable advantage in measuring wind direction when atop a sailboat mast that is swaying back and forth, vs. a standard raymarine st60 wind machine? While it seems clear it would also report the wind direction changing on each oscillation of the mast, I am wondering if the effect would be much less … or if any damping algorithms in the raymarine e-series have the effect of making the mechanical and ultrasonic versions have similar readings.
Dan
Huntington, NY
Ah, I feel a little better. One reader who insisted that I was wrong that TWA/TWS is derived from STW not SOG/COG went and asked Raymarine how his ST60 does it. Answer: STW only.
Some manufacturers allow a choice, I know, which may be useful but further confuses some folks. But Raymarine has always done wind calcs thoroughly for sailors. Here are some old screen shots that suggest all the vector math going on inside, plus the bottom one shows how an E120 refuses to do TWA/TWS without STW.
https://panbo.com/archives/2006/06/ultrasonic_weather_wars_w_raymarine_as_switzerland.html
Ben:
Thanks for bring up wind and Ray E units again.
In your first screen shot of weather data the wind is almost directly on the bow with a boat heading of 150 degrees. The ground wind should also be 150 degrees in this case, but 069 true is displayed.
I think there is an error in the software, do you agree?
Blame the confusing numbers on me, Bill, not Raymarine! This was done a long time ago in my lab with essentially uninstalled sensors. A boat speed of .8 kn computed against a SOG of .1 and COG unknown led to a computed current set of almost 2 knots. In those odd conditions the ground wind makes sense.
I should make screens in more realistic conditions.
Ben: No, it’s not your numbers that are off, it’s Ray.
Notice how true wind(6 degrees) and COG(62 degrees) and up to ground wind direction(69 degrees).
The problem is COG is used to compute ground wind. When the boat is not moving COG is meaningless causing ground wind to be bad. Ground wind is fine if the boat is moving.
I would like to know what ground wind is when secure to the dock. It is a great feature if it worked right.
I have made product suggestions to Raymarine about this with no result.
Thanks
Ground wind does work right. It is referenced to the boat’s heading. If there is no COG or SOG, then the heading is used pure. If there is COG and SOG in the network, then these data are used to correct. The boat does not need to be moving in order for heading to be read.