Impatient me was beginning to wonder if the intriguing Iridium 9602 short burst data modem would ever materialize into a useful product. The Cerberus communicator and service I discussed in Januaryis supposed “to arrive” for real in 7 days, but it’s gotten zero marketing so far, and I haven’t heard about any other 9602-based devices that might seriously appeal to boaters until yesterday. And, in fact, even the DeLorme inReach isn’t scheduled to ship until Fall. But it certainly looks neat…
Maretron’s Rich Gauer has repeatedly tried to explain to me how NMEA 2000 is an impedance-driven networking technique and that’s why it’s so important that the cabling have the right electrical characteristics with the proper termination. He can get quite passionate about the subject, almost poetically describing clean waves of N2K data bits getting distorted by reflections to the point that microprocessors along the backbone can’t recognize them anymore. But then again Rich is an electrical engineer and Maretron may well have more troubleshooting experience than any other company with the large N2K networks where impedance problems tend to show up. Installs or other manufacturer’s gear that cause trouble because the impedance rules aren’t abided to gets him upset! However, a guy like me is way better at visualizing the dynamics of a hull passing through ocean waves, and I couldn’t begin to fathom the “Transmission Lines, Reflections, and Termination” PDF Rich once linked me to. Which is why I am especially taken with the graphic N2K analysis (above) that our friend Kees Verruijt posted on his Yacht Electronics blog…
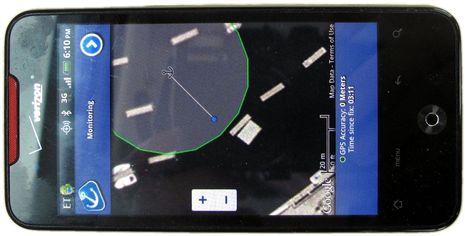
It’s obviously not practical to anchor in Camden’s Inner Harbor — especially as there are often two Gizmo-size boats on each of those floats — but it was a good first taste of Boat Monitor, a very interesting new remote anchor watch system. What’s happening here is that I used Gizmo’s low-power Datalux police car computer (seen in yesterday’s entry, and also here) to log onto Boat Monitor’s web site and establish a sophisticated anchor watch keyed to a Garmin 17x GPS connected via NMEA 2000. Boat Monitor’s server then started minding Gizmo’s position, ready to serve it elsewhere and/or send alarms as needed. One possibility is this $5 app on my Android phone, but there are others. The details and flexibility are impressive…
I’m a little spoiled. The home office where I do most of my online research, writing, and photo editing work is equipped with a pair of fairly spacious Dell monitors — 24- and 20-inches...