
Lessons of Vestas Volvo wreck, but what about the C-Map Grounding Alarm & similar?

The fixed camera on the stern of Vestas Wind captured the worst possible unintended jibe. That’s when you’re blasting along at 19 knots through a tropical offshore night, but then your Volvo Ocean 65 suddenly smashes its way up onto a reef shearing off the rudders and spinning 180° as waves and wind take total control. That is a frightened and nearly naked man beyond the limp mainsheet and when watching the video you, too, may utter involuntary curses. No one was hurt, though, and the crew has been frank about the mistakes made. This has led to some useful conversations about the dangers of electronic charting, but it also reminded me of an uncommon electronic charting feature that might have prevented this shipwreck…

It’s impressive that the one-design Volvo racer hadn’t already lost her mast or canting keel when this morning-after photo was taken, but the boat itself is probably toast — note the “hinging” starboard quarter — and according to Monday’s press conference Team Vestas Wind may build another Ocean 65. Also impressive is how the crew removed possible pollutants and valuables like sails, carbon steering wheels, and that fabulous aft array of satellite, VHF, cellular and WiFi communications gear. And how about a shout-out to the Inmarsat sponsorship and Cobham Sailor hardware for making the HD video coming off these boats possible even in the “middle of nowhere” via FleetBroadband.

But how the heck did professional sailors make this mistake? Peio Elissalde over at Marine GeoGarage posted a great collection of chart images showing the “middle of nowhere” Cargados Carajos Shoal that Vestas Wind fetched up on. I’m not sure where he grabbed the screen above because I don’t see a satellite map option on the Volvo Ocean Race tracker, but the fairly large area of reef and islets is certainly obvious from space. Vestas Wind is on the very steep-to and dangerous western side while Alvimedica is on the safer side ready to assist while the other racers pass by.
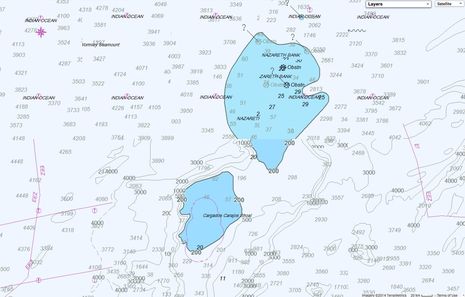
While I’m not sure that the GeoGarage image of the large area C-Map above looks exactly like the presentation that the Volvo navigators saw on their AdrenaPro Offshore and Expedition 9 charting and routing screens, several reported that they had to zoom way in to see the real danger, and Vestas Wind thought the shoal was at least 40 meters deep. There’s a long SailingAnarchy thread on how the mistake was made, some of it valuable, but Starpath’s David Burch may have nailed it in a blog entry titled Don’t Blame eCharts for Anything. I often draw a similar distinction between the act of navigation and the tools used (and I wish I could find the Panbo entry I once wrote about particular cautions to take with vector chart zooming, scales, etc.)
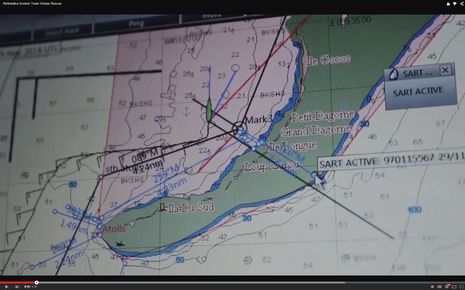
6 out of 7 Volvo boats did not make the Vestas mistake and you can see one of the techniques used on this Expedition screen from the gripping video of Alvimedica standing by. As I understand it, the light red exclusion zone drawn around the shoal would keep Expedition from routing the boat through that area and may trigger alarms, even when the chart is so zoomed out that the C-Map detail goes away. I think that a lot of regular charting programs and MFDs offer a similar boundary feature to highlight danger areas. Note that Vestas is marked on this screen by one of the crew’s Kannad R10 AIS SART devices, and that Alvimedica navigator Will Oxley did a lot of quick route and (light blue) divider work to get safely into the bight and prepare to possibly take on passengers or worse.
At any rate, Vestas Wind navigator Wouter Verbraak and skipper Chris Nicholson have admitted to a grievous navigation error, and hopefully, a lot of sailors will now be extra careful with their electronic chart work. But here’s the thing: I believe that most every charting program, app and MFD “knows” when we’re about to make such a mistake and could warn us! Vector charts are databases of objects and related information, and the algorithms that decide what gets drawn on a screen at any particular location and zoom level are what we need to be careful with. But the database includes geopositioned spot soundings and shorelines, while the display knows precisely where you’re headed relative to the data. A constantly running search algorithm that concluded, “Hey, shoal water and then land 1 mile dead ahead!” doesn’t seem hard.
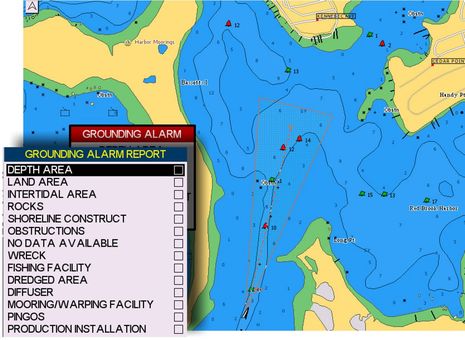
In fact, data-based grounding alarms have existed for quite a while. Jeppesen C-Map calls their version Guardian Alarm and any developer who wants their charting software to use C-Map Max or 4D cartography receives an SDK containing the search algorithms. When available — and apparently that includes a lot of current chartplotters by the likes of Furuno, Standard Horizon, and Humminbird — the MFD user gets to set a minimum draft and the distance to look ahead. They also get to choose what chart objects will be “interrogated”, and the search area is shown on the chart by that red triangle. If a danger is seen, an alarm pops up and you can also get a report showing which object type triggered the alarm. The Guardian Alarm can only be set to search 1 mile ahead at max, which is not ideal for a boat doing 19 knots way offshore, but it still might have helped (especially if they’d set their draft to 99 feet or whatever that max is). And couldn’t ever-improving processors handle longer ranges?
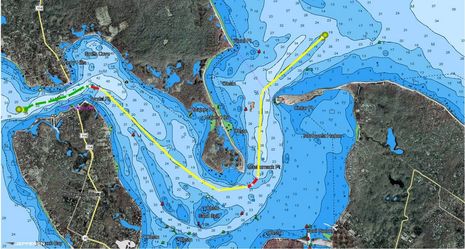
C-Map’s grounding alarm cannot only run when you’re underway but can also be used to check a proposed route, as seen above, and note that 4D includes auto routing. I’m happy to add that Raymarine is working right now to make C-Map 4D cards compatible with all its current displays. I don’t know for sure that Guardian Alarm will be part of Lighthouse II v13, but let’s hope so.
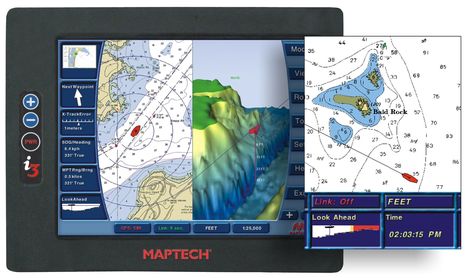
Let’s also note the similar “Look Ahead” function that was prominent on the Maptech i3 over a decade ago (and also on the sister Sea Ray Navigator, also now long gone). The graphic looks something like the Simrad and Echopilot forward scanning sonar that is gaining a new lease on life, but of course, is quite different in potential range and use. I want both!
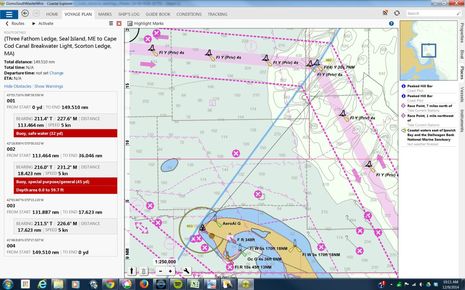
Finally, Coastal Explorer can also identify obstacles along a planned route and clicking on the red notations below takes you right to the problem area. The quickly created route name below also shows how CE can sensibly name a waypoint from the vector chart database, so if it had an underway grounding alarm it could maybe say, “Hey! Cargados Carajos Shoal 5 miles or 15 minutes dead ahead!”
So, what am I missing here? We all make mistakes. Why aren’t vector data-based grounding alarms more available or used more when available?








This reef seems appropriately named. In Spanish the noun carajo is slang for hell. As an interjection it means damn it!
if i designed the boats i would have put a plotter behind the wheels and one at the front of the cockpit. when im skippering i like to know whats going on.
Funny, Mark, they’re arguing about that now on SailingAnarchy. At least some of the boats seem to have B&G Zeus2 plotters in front of the wheel. But mind you that everyone on board thought they were far from any shallow water, let alone a surf line, and some people think that one contributing factor was how shorthanded these Volvo 65’s are. Apparently the crews are very busy and these guys had just been through a storm to boot.
I’m pretty sure there are legal reasons. MFD makers don’t want to get sued, if for some reason there is a grounding. It’s like automatic brakes on cars with obstacle detection. They could do a full stop, but for the above reason they only warn or brake lightly.
We see too many cases when boaters think that setting up AIS equals being free to spend the time in the cabin with beer. Manufacturerd don’t want to take the same risk with running aground in such a case.
Thanks, Szigi, but grounding alarms aren’t theoretical. They exist already. And they don’t have the liability of active safety device. A grounding alarm is not automatic brakes, it’s an alarm.
Ben on my Garmin 4212 with G2 chip installed when I go into Camden harbor from the bay I get a alarm, visual and audible, that I am entering a dangerous area. It happens in other similar areas up and down the coast. I have never asked what triggers these alarms but the chartplotter recognizes a dangerous situation. Whether it is the depth or width of the harbor or number of AIS targets I am not sure. Maybe I need to get into the setup menus this winter. Something is working right.
Good article, Ben. Your comments on Expedition are correct, but to expand a bit the light red polygon drawn on Will Oxley’s screen is an exclusion zone he has created around that reef system that makes that area out of bounds for the optimized routing routine. Further, some measure of red appears on the chart regardless of Zoom level. The Expedition program calls this feature “Notes” and is a powerful passage planning aid – to be done well in advance of throwing off the lines. As a side note, it amazes me that none of these guys are ever “hooked up” at night. They were very lucky that one or more didn’t get thrown out of the boat when the keel dug in and spun the boat 180 degrees…
Thanks, Larry! I gather that Volvo navigators routinely go over possible courses and mark exclusion zones before each race leg. But apparently the boundaries of this particular Volvo leg got changed at the last minute and the Vestas navigator thought he’d have time to recheck the route after they got underway. But he didn’t get around to it.
What I wonder is if Expedition and other charting programs that use C-Map Max or 4D have considered enabling the Guardian grounding alarm. I don’t buy the idea that lawyers would advice strongly against it, though I know that concept is being kicked around on SA (along with lawyers in general ;-).
Hi Ben,
That would be a good question for Nick White, the creator of Expedition. Nick is incredibly responsive to inquires and issues a program update nearly every two weeks. Expedition is by far the most capable Racing Navigation software I have used and seems to be ever expanding in capability. BTW, you can load both raster and vector charts into the data base and also has the ability to geo-reference a GIF file (such as a color Gulf Stream picture) into the chart data base.
Larry Hall
Thank you too, Allan, but your comment reminds me that any alarm has to be designed well to be effective. I think the Garmin pop-up is telling you what the presumed danger is — collision with an AIS target — but you’ve forgotten the specifics because it happens almost every time you enter Camden Harbor and there’s no real danger.
I say that because Garmin’s minimal AIS alarm is 500 feet CPA and 1 minute TCPA, which will nearly always kick off an alarm in summertime Camden, even though the “dangerous” targets are tied up! Plus if you turn the alarm completely off it will come on again the next time you power up the Garmin MFD unless you specifically check the “Always Off” box.
The “Always Off” option was a weak fix for the over alarming that many of us complained about. What Garmin should do is add a control like “Do not alarm on targets going less than xx knots” which is fortunately becoming fairly common on MFDs (you can’t just say zero knots because sometimes a tied up GPS generates a little SOG).
It might actually be useful if your Garmin alarmed and highlighted a moving AIS target somewhere in crowded Camden harbor when you enter. There’s actually a lot more nuance to good AIS alarming and Vesper Marine has been blazing the trail.
Meanwhile, the C-Map Guardian Alarm looks pretty good to me if it reliably picks up the objects desired, mainly shallow depths. And it might very well use detailed bathymetric data instead of vector chart spot soundings and depth contours, if the card includes the extra data.
However, I’d sure like to see a wider range of look ahead ranges. Alarms on dangers even .25 miles ahead could be quite annoying when doing some of the gunkholing I enjoy, but 100 feet could be useful (even alongside forward looking sonar). But how about 5 miles for offshore use, plus maybe the ability to alarm greater depths? Vestas Wind is just another vessel that went amiss on a well-charted but unnoticed hazard.
For a sense of how demanding this race is, consider the current situation:
http://www.volvooceanrace.com/en/dashboard.html
After nearly 22 days of non-stop racing, Team Brunel is in the lead but ghosting along a 4 knots with Dongfeng 2.6 miles back also at about 4 knots and Abu Dhabi 8 miles back doing 7.4. I think it’s hot too and I bet those paint jobs don’t help with conditions below.
Great article Ben! the screen cap showing Team Vestas on the reef is from http://volodiaja.net/Tracking/ an alternate tracker (using Google Maps and wxTiles overlay) that was developed by VOR enthusiasts in the early days of the race following some early disappointment with the VOR original tracker.
There is one more safety device that may have helped avoid the shoal, but has not been mentioned – FLIR!
I don’t know all the circumstances, but running at night (and fast) and knowing you are relatively close to dangerous reefs, I would use a thermal camera as an extra pair of eyes. It can distinguish breakers.
Just a thought.
True that; even a basic fixed FLIR thermal camera probably would have shown that surf line at some distance, in dark or glare. But I’m not sure where they’d mount it to avoid sail interference.
I also don’t understand the radar situation. The impressive list of B&G electronics you can see here…
http://www.bandgblog.com/volvooceanrace/
does include a 4G Broadband radar. But I don’t recall seeing a picture of an Ocean 65 with the radar mounted and I don’t know when, if ever, they’re required to use them. I saw a bold coastline at 34 miles with a 4G last fall (radome at about 12 feet, moderate sea state), but don’t know when it might have seen that low reef and islet area in rough conditions.
Good idea, Larry! Nick White answered promptly and here’s news: Expedition will soon have C-Map Guardian and Safe Route abilities!
Nick is cautious, though, writing that “It is something I have resisted over the years as I fear it would just encourage a large group of people to stop navigating altogether. An uncomfortably large percentage of the modern generation have a tenuous enough grasp on it as it is.
That said, given the recent Vestus incident, we have enabled the safe routing and guardian alarm functions. This is not released yet though.
Obviously there are some concerns. The main one is if a user comes to rely on it and something is missed. These aren’t ECDIS systems after all, which is why we have the start up window reminding the user that using Expedition does not mean they can stop navigating.
Another relevant point is that such an alarm probably would not have saved Vestas. It sounds as if there was no one in the nav station at the time of the incident and the chance of hearing an alarm on the laptop over all the noise and reacting in time is quite small.”
Pardon me if I ask the most basic question.
Where was the lookout? On soundings doing 19kts. was there no one with eye balls?
Back in the ’90s on a large 940′ vessel traveling at 27 kts I saw on the “new” chart GPS display what looked like the left overs from swatting a bug. On zooming it turned out to be a sea mount and our course would have taken us right into the center. The latest charting is far advanced but in the end it is the deck crew that needs to respond to the information.
Notwithstanding the righteous few who have apparently never committed a major navigation error, the Vestas wreck is a vivid example of how a boat with highly trained professional sailors constantly standing watches on an open deck can still hit a visible danger.
The video at the top of the entry shows what was happening on deck before the wreck and this interesting version shows a bit more: http://youtu.be/DLu3f6inudo
You’ll see that there were lookouts and in fact they did see and talk about something — probably the surf line — a few minutes before the wreck. A third guy comes on deck, purportedly the skipper, immediately comes on deck to look.
But the most important detail in this video is that you can hear the helmsman say “we’re going over submerged shoals right now, 40 meters deep.” No one on the boat thought they were anywhere near water that was less than 40 meters deep. That was the major mistake they made and a deep mistake like that will definitely change your ability to see things right in front of you, or at least your perception of them.
What the Vestas crew saw could not possibly be a breaking surf line because that didn’t make any sense!
Perhaps my closest call at sea was based on a similar fundamental navigation mistake that was very hard to see despite a lot of evidence. Seriously, I could have drowned and might have taken three good men with me, and I managed to do it with traditional paper chart navigation. Details here:
https://panbo.com/archives/2007/05/rfu_w_rdf_so_bad_we_missed_cape_cod.html
I hope those righteous few aren’t bragging — that would be tempting fate. The better claim is “there but for the grace of God go I”, or perhaps more PC these days, “there but for fortune” (Phil Ochs).
I agree with Ben, we need smarter chartplotters, the little angel that whispers in your ear (did Disney invent that image?) to keep you aware of possibilities. A quiet co-pilot, not a nervous back-seat-driver with annoying false alarms. Alarms have their place, but if one comes up you have already missed a warning or the warning was missing.
great article and thanks for writing it! I’ve been following this issue and still wonder why, unlike NOAA paper charts, vector chart depths at zoom-out resolution do not reflect the minimum depth in the grid zone. If you have depth readings spaced every mile and there’s one surface reef surrounded by 1000m deep water, that grid should show 0m a mile square. Not 1000m or something in between. Who knows what the depths on these C-maps mean?
The proliferation of an alarm to add safety into plotting is technically feasible and would certainly save boats and lives. Obviously, such an alarm should not be a legal question, but in the USA…ugh. Sometimes it’s cheaper to hurt people than do the right thing. (look at car recalls) I hope that is not the real reason why such alarms are not used widely. oh the woes of society, where $$ is more important than people’s lives.
I have doubts that any radar and particularly 4G mounted low on the boat, like on a post or arch at the stern, about 12ft from the water, would have clearly painted a reef and surf line. My experience with such a radar setup in open ocean waters even in fairly nice conditions was disappointing. I put this down to:
– the motion of the boat
– the antenna at 12ft height vanishing completely in the troughs of some of the larger seas
– my Scanstrut self leveling mount overswinging significantly. It should have much stronger damping IMO. I would no longer dare to put a unit like this up on the mast where the motion is much stronger again.
I think it is these three effects that work together to make real targets vanish and pop up again and make them jump around and this is then compounded by lots of false echoes from sea returns. The target filtering of the radar display and my own “filtering” when looking at the screen then blend out (discount) the real targets, even a container ship at 6nm.
When motoring in calm seas that same radar clearly showed the volcanic island of La Palma at 28nm range but then there was no real risk of us hitting that island. When there was a real risk, on passage from the Azores to England, I had to rely on AIS, especially at night when eyeball visibility was low in fog or drizzle. This is in spite of me spending many hours playing with the settings.
The radar alarm was unusable because of constant nuisance triggering or else, with the sensitivity down enough to avoid nuisance triggering, the radar would be basically blind.
In situations like what Vestas Wind had when approaching the reef, I think one would need the antenna way up at the mast and maybe a powerful magnetron.
A look-ahead depth alarm may make a lot of sense but it would require a fully satisfactory solution to the problem of nuisance triggering. IMO fixed settings for any kind of alarm (radar, AIS, depth alarm) just won’t cut it. On an ocean passage I would want an AIS alarm setting of 25nm and 2 hours TCPA while in port or in an inland canal I would want no alarm at all because settings that would avoid false alarms would be 5 feet and 1 second and alarm settings like these don’t make much sense.
My idea would be to define maybe 4 separate alarm settings that will then be activated by the plotter corresponding to the zoom level of the chart active at any time like harbor, approach, coastal and open ocean.
However, I would myself probably be more likely to use a route checking feature that walks along a route and checks it for sufficient water etc. rather than a “depth ahead” alarm. Coastal Explorer calls this Obstacle Checking but it’s not available for C-Map yet. It won’t help if it’s not run before taking off, true, but it would hardly ever issue false alarms, too. I usually spend some time setting up a route with some detail and then go along the route again to check for any kind of problem. When underway, I typically stay close to my route and am reluctant to cut a corner or follow local boats taking a shortcut because I hadn’t checked that other way out beforehand.
In some of the in port pictures you can see a small radome on the mast. I think the race would be very dangerous without radar.
I do not know if VOR does this but it is relatively easy to tie the alarm from the chartplotter to a speaker by simply connecting the audio out of the pc to a small amp like a car stereo. You want to disable the extraneous windows sounds if you do this. More professionally it is possible to have a program trigger a relay through all sorts of methods. So the objection that an alarm would not be heard has no merit.
I think a better feature would be a virtual forward looking sonar displayed on a small screen for the lookout and helms person. You also need to know about danger that you might turn into.
at the front of my cockpit i have 2 large plotters for all the crew to see. on one i split the screen showing far and near. the reason i have it set in that manner is for exactly the reason that caused the accident. with all their experience a novice has to wonder why they haven’t come to the same realization.
Henning has doubts that any radar would have clearly painted a reef and surf line. I have doubts too, but for a different reason. Everybody regards returns from waves as noise, so they are deliberately suppressed as much as possible. We know that radar can see waves and boat wakes, although it does depend on the wave shape.
With shipping using AIS, what exactly are you watching for on radar on a passage? Radar is not currently smart enough — blips come and go, where is the feature that determines which are real and tracks them, a more advanced MARPA which doesn’t just drop a target if it misses a few scans. A radar where you can change the range and the blips on the screen (which are real targets) do not disappear into a dust speck sized pixel or two.
Hi all, I just “unpublished” a series of comments about Simrad 4G performance offshore because we were really getting sidetracked and I hope there’ll be more discussion of the Vestas wreck and grounding alarms.
No comments were lost, though. In fact, the subject of 4G performance deserves its own space so that future readers searching for such info will hopefully find it here:
https://panbo.com/forum/2014/12/simrad-4g-radar-offshore-performances-issues.html
My thought was similar to the one George posted.
My first thought upon reading the thread(s) about the incident was why weren’t they using Forward Looking Sonar (FLS).
Is FLS not up to the task yet? Would it not have clearly shown an obstacle in those seas and would an FLS be fairly immune from false alarms?
Is FLS going to be more reliable on a multihull than one of these flat-out racing craft?
Opinions from anyone here with FLS experience?
Thanks,
Merlin
I think this applies here: You do not see what you are not looking for. However, if you were using radar to look for surf, I have it on good authority that it might work. Here is a blog entry by Steve Dashew about using radar to see turbulence, in this case caused by strong current. He uses high-end radar, so I cannot draw a conclusion that every radar would work as well.
http://setsail.com/s_logs-dashew-dashew416/
Hi Merlin,
Forward Looking Sonar would not have done Vestas much good at 19 knots. I haven’t gotten to test Simrdrad/B&G FS in deep water yet, but would guess maximum range at maybe 500 feet:
https://panbo.com/archives/2014/10/simrad_forwardscan_bg_too_a_breakthrough_even_in_beta_testing.html
The raw performance of EchoPilot FLS is similar and I’ve seen nearly 500 foot range with it, in deep water with an up-sloping danger ahead:
https://panbo.com/archives/2014/08/echopilot_platinum_fls_better_than_expected.html
But George referred to “virtual forward looking sonar” by which I think he meant the data-based grounding alarms discussed in the entry. The display can look like sonar-based FLS but it’s a very different technology. Every laptop charting program and MFD on Vestas knew precisely where the boat was, where it was headed, and what the charted depths were all around.
I use Raymarine E90 W and other E series plotters and they have a Collision Alarm which will sound if triggered. A proximity zone is user definable up to 2 miles in front of the boat and at angles from the boat 90 degrees. use specifies what types of hazhards will trigger alarm such as land, or water depth above a set value. Seems this is more then enough to have saved the boat, even if the chart and GPS coordinates were somehow out of sync by a very large degree.
Seems the main problem is, do people use this feature. To be honest, I was not trained on this feature or knew of it until the Vestas wreck. I will turn it on now, every time. Actually, kind of shocking this is not required by race regulations.
Wow, that’s a surprise! I found the E-Wide user manual…
https://flir.app.box.com/s/437qeua23rju68u793tv/1/1355225454
…and sure enough page 114 details the Collision Alarm
“You can set up a collision alarm zone in front of your vessel to alert you to charted objects above a specified depth, or below a specified height.
You can specify the size of the collision alarm zone, which consists of 2 sectors:
• the range in front of your vessel, which can be adjusted between 0.05 and 2 nautical miles.
• the bearing from your vessel (width of the zone), which can be adjusted between 0 and 90.”
The alarm area can show on your chart like the C-Map grounding alarm shown above, and you get a similar choice of objects to alarm on.
But, damn, I don’t see any trace of this alarm in the a-,c-, and e-Series manual. Raymarine, can we please have a second chance to use this alarm???
This is straight from the Raymarine e-series manual:
10.2 Alarms
Alarms alert you to a situation or hazard requiring your attention. You can set up alarms to alert you to certain conditions, such as collision warnings and temperature limits.
Alarms are raised by system functions, and also external equipment connected to your multifunction display. When an alarm sounds a message dialog is displayed on your multifunction display and any networked displays. The dialog states the reason for the alarm.
You can configure the behavior of certain alarms by selecting the Edit option on the message dialog or by using the Alarms menu, accessible from the homescreen via the Set-Up icon.
Silencing/Cancelling alarms
To silence/cancel an active alarm:
1. Select Ok on the alarm message dialog.
Note: Once silenced some alarms may remain active.
All of this talk of radar and collision avoidance and I think we are still missing some basic watchkeeper job – eyes.
I still contend the FLIR would have been more helpful.
Now all of our comments are armchair quarterback comments and hindsight is 20/20.
The fact is accidents DO happen and are sometimes avoidable (human error) and sometimes not and SOMETIMES a little of both!
I am just glad all aboard were fine.
Hi Valkyrie, I think they mean AIS and radar collision alarms for the a, c, and e-Series. The naming is confusing but I see no detail on a current alarm that’s anything like the Collision Alarm that’s in the E-Wide Series.
A recent version of Lighthouse II software did update a, c, and e alarms in lots of good ways but you have to get the manual dated Oct. 2014 to see what they did. Now the Alarms chapter is 12 not 10, for instance:
http://www.raymarine.co.uk/view/index.cfm?id=2966&collectionid=96&col=9612
It was an island.
It was on the chart.
The end.
Yo, Josh, did you know that real Slocum’s famous small boat voyages began after he wrecked the 326-ton Aquidneck on a sandbar in Brazil, and it wasn’t the first vessel he lost?
http://en.wikipedia.org/wiki/Joshua_Slocum#The_Aquidneck
I’ll bet that he took full responsibility and that other experienced skippers (like Norse) muttered “there but for the grace of God go I.”
Charlie Doane put together a good Vestas follow-up here…
http://www.wavetrain.net/news-a-views/638-vestas-wind-shipwreck-post-mortem-with-embarrassing-personal-recollection
…and a salvage attempt is underway:
http://www.sailingscuttlebutt.com/2014/12/18/vestas-begins-indian-ocean-salvage-volvo-ocean-65/
Cool, they did it! Vestas Wind is on the deck of a Maersk container ship right now, headed for a repair shop:
http://www.volvooceanrace.com/en/news/8188_Off-the-rocks.html
Valkyrie Yachts,
Accidents do happen, and you are absolutely correct. “Look out the window-” is the professional term. The human error chain of events is studied constantly- and error may be over simplifying- the error of not being prepared, not knowing the full situation, or in this event- maybe all the way back to the change of sailing boundaries- and the failure to prioritize the navigators time to study and double check the navigation anticipated track.
Probably not as applicable in this specific case the lack of understanding the limits of electronic equipment vs the expectations. This is an observed problem, particularly in the recreational market. In the professional maritime world the testing and procedural requirements are focused recognizing human nature- in the recreational world this is not regulated.
With the advent of electronic technology, the human has been able to significantly push traditional wisdom to the back seat-examples include making scheduled landfall in bad weather rather than hove to till better arrival conditions, venturing into fog with uneducated reliance on equipment, expectations of relying on integrated systems that permit belief the margin of risk to be significantly reduced.
Previously this past fall the United Kingdom Transportation Safety Board released a report of a chemical tanker grounding in the Straits of Dover. The short of the report- the mate in a hurry laid out the course to the next port over a shoal. Never was the ECDIS zoomed to double check the depths. As the bridge navigation integrated equipment had numerous alarms-some constantly tripped due to narrow parameters- the alarms had been silenced out of habit or routine. specifically- the entire route was in waters that made the depth alarm trip excessively. Additionally, the placement of the visible alarm on the ECDIS was not readily noticeable in the data overload of multiple sensory alarms-
The point of my discussion- all these new technology gizmos mentioned in this website are wonderful- but i would venture the majority end users have a limited understanding of the downside of the equipment and therefore many have found themselves lured into greater peril than they intended.
So all discussions above- keeping navigation simple includes the discipline of tradition- looking out the window- know the equipment and discipline the routine to properly program, planning the route to include awareness of all traffic, shoals, radio communications, charts, etc.
One last thought for many- the Ipad 4 lte technology does not necessarily use a GPS for position- therefore I find it amusing when positions are terribly inaccurate in areas of poor reception….
There is a lot of talk out there about what can and can’t be done , and what should and shouldn’t have been done , but a disaster like this was not due to a problem , but rather a chain of events leading to the incident . To show how professional this team is ,the chain was broken immediately on impact and the results show with everybody getting to go home safely . I have worked for a number of years with a lot of the crews sailing in this edition of the Volvo and they are all highly qualified to fill that position . Wouter is a very thorough ,professional navigator and it was a very honest mistake that he made and which every other navigator in the race would admit could also happen to them .
Nobody can pinpoint one problem that caused the incident as it was numerous issues , but a major one was the invisibility of the reef and islands at the zoom levels the navigators where using to do the performance routing ,which is so important in a race like this .
Posters mention the possibility of using FLS , but at the speeds these boats do and the steepness of the windward side of the reef , it would leave no time to react , not to mention where you would put the transducer as a lot of the time the boat forward of the keel is out of the water .
Hindsight is 20/20 and we can all sit comfortably at home commenting on the do’s and dont’s ,but unless you where actually there experiencing it ,there’s no room to talk ,only learn from the mistakes of others , and a lot will come out of this incident in a lot of different ways . I know Nick White is implementing some immediate changes for a new update for the boats which will try help prevent another incident .
All in all I hope boaters in general can quietly learn from this incident .
Its very rare that a single incident or mistake is responsible for an accident. I’m sure the Marine Accident people would have a field day if this was a commercial vessel. From overworked crew, poor charting, changes in the sailing plan, not enough time, poor navigation practice, lack of radar or position monitoring on a chart etc., etc.
Questions have to be asked why was CMAP data being used for navigating a yacht of this calibre, surely the use of official updated data (S57 AVCS/Primar) and a ECDIS style display would have been more appropriate and which is designed to prevent just this type of error? This was not a leisure yacht on a tight budget but a commercial racing yacht!
If the finger has to be pointed at anyone then its probably at the Volvo race organisers, they are the ones who control the pressure on the crews, for example they could rule there must be someone monitoring position, enforce a sign off of passage plans, add the requirement to navigate using official S57 data with weekly updates and an ECDIS style display etc.
But this is a race and maybe risk is part of the fun and the race culture!
Ben-
The above discussions are very technical- but I would like to point out to all- technology is based on data-in data-out.It is also easy to over-data with extraneous non-essential real time info.
The human error will be sourced to be the last minute change of boundaries for the race-and in this case a rushed navigator who failed to a double check in a seamlessly simple open ocean. The culprit is the over reliance on the technology and not a discipline practice aka: the watch officers periodically running out the zoom on the plotter for the watch time frame to anticipate conditions-potential landfall, sea conditions, weather.
Accidents do happen- just a bad day at sea.
technology provides fantastic tools to assisting the crew, but priority must be made to understand the limitations and the human errors that technology promotes. The downside is the more complicated and integrated it becomes, the more opportunity for errors to be introduced that significantly erode all the precision and efficiency of the design.
I believe due diligence was used in this grounding. Cutting edge of technology was being utilized. Automation and other programs may have helped- but sometimes it is just your turn. Meanwhile discussions allow others to learn awareness-educate- and hopefully prevent a future repeat. Most important- do not fail to practice the traditional methods of navigation.The on watch had a prior gut feeling the wave pattern was changing without reason but discounted it as not credible. Additionally, recognize that the charts may be incorrect- look at the dates on the soundings. When in the north latitudes of the Hudson Bay and Labrador much of the information dates back to Henry Hudson.
More computer assisted groundings and collisions are to come in the future. This is simply because technology promotes risk behavior that reduces tolerances. Nick White makes mention to the concerns about public reliance. The US Navy exampled that two years ago. Professionally it is a huge concern and topic in every continuing education course.
Ted
Brian, the Vestas wreck was caused by human error, as the specific humans have admitted over and over again. I think it would be ridiculous to mandate ECDIS systems on boats like these, but I’d be interested to know exactly what ECDIS would have done better.
For instance, what is dangerously different between Jeppesen Professional ECDIS charts and the C-Map charts Vestas was using? I believe that both formats are derived from the same C-Map database of information. I doubt that the non-commercial charts leave out some information that’s valuable to non ECDIS boats, but that would surely be good to know. Please illustrate.
And how is an ECDIS display specifically “designed to prevent this {Vestas} type of error”? I do know that Jeppesen Pro charts include human-vetted routes between many commercial harbors but they are not relevant to sailboats.
I also know that some very large yachts are mandated to carry ECDIS systems but often install non-ECDIS chart plotting like Nobeltec because the professional crews like it better.
Hi Ted, How the heck did you come up with “The culprit is the over reliance on the technology and not a discipline practice” when the navigator of Vestas has already explained how he failed to practice his normal discipline? Just like the other Volvo navigators who knew exactly where the danger was, he should have checked the area before he got there and marked the reefs as an exclusion zone.
“More computer assisted groundings and collisions are to come in the future. This is simply because technology promotes risk behavior that reduces tolerances.”
Sorry, but that’s also nonsense. Can you seriously make the case that it was less risky to cross oceans with poor charts and only celestial navigation and dead reckoning to determine position? History indicates otherwise.
I do share Nick White’s caution about lazy modern navigators, but it’s a matter of craft not the tools used. I’ve always taught that the correct attitude of a navigator verges on paranoia. You’re smart to be constantly wondering what wrong presumptions are about to cause you trouble!
Incidentally, doesn’t modern flying gives us all a terrific example of how super safe navigation discipline can be attained? And doesn’t it simply shatter the notion that the “more complicated and integrated it becomes, the more opportunity for errors to be introduced that significantly erode all the precision and efficiency of the design”?
Modern avionics are incredibly integrated and automated but the people using them are subject to rigorous training and regulation. They’ve also learned a great deal about the psychological dimensions of mistakes, like fatigue, miscommunication, cascading errors etc. and they’ve developed techniques to avoid them.
I think that pilots talk about situational awareness, not “computer-assisted collisions” because they understand the difference between craft and tools. Why is it so hard for many boaters to get this?
Ben-
The electronics are tools-
to go into a bit deeper explanation- Aware the navigator did not exercise completely his responsibility- but as well the responsibility is shared with the watch officers who as well did not zoom out the anticipated DR track prior to each watch. The time honored craft is being eroded by over expectation of the tools.
Comparing the aircraft industry integration to maritime is a debatable discussion off topic. I can argue the issue both ways in depth. A young industry, regulation, and single median(air) are the out front topics.
I do not discount the advances of integrated electronics-but it is fact that the general public prefers plug and play with expectation of infallible operation. This promotes a new set of risks while it diminishes others.
Examples include scheduled landfall when conditions are unfavorable, promotes transits in reduced visibility without concept of inaccuracies, passages without preparation for contingencies. The number of recreational incursions with commercial traffic is up compared to previous decades- the GPS has allowed many more opportunities for the recreational vessel to transit where it previously feared. Some of this is debatable because of better reporting methods and legal pressures, but the replacement for hard groundings is congestion in fog.
I have taken on a stance in the recent years to promote KISS- because the more integrated the systems (ECDIS ) , it seems the more it cannot be trusted in proximity to high risk (closed water, meeting situations within half mile).
Yes, it does well in the ocean-but coastwise professionals are trained (educated) to discount much of the data as risk proximity rises. A new term-data overload.
The Panbo forum, focused more towards the educated and interested global sailors, can get specific into the technology and issues with solutions for manufacture shortcomings. That said, more followers read and digest this information for the desire to improve their own electronic education. The perception that more electronic input should be added vs utilizing the existing craft is my concern- before suggesting adding more integration lets promote better understanding of the shortcomings of what tools are available. Computer-assisted collisions are on the rise- simply because people are relying on the computer to practice the craft.
Ted
The independent report on the Vestas Volvo wreck is out, and it looks like C-Map must share some of the blame {link updated 8/25/2021):
http://honeynav.com/wp-content/uploads/2016/06/m36616_team-vestas-wind-inquiry-report-released-on-9-march-2015.pdf