
Raymarine 2013 demo boat: gS165, the RMK-9 keypad & more
 Yesterday I enjoyed a few hours on Lake Winnipesaukee, New Hampshire, aboard a Boston Whaler 280 Outrage recently fitted out as a Raymarine demo boat. Much of what I first saw introduced in Miami last February is now shipping and working in impressive ways. Note, for instance, how the “low end” Dragonfly sonar/plotter is holding bottom in DownVision mode at more than 106 feet and 28 knots. And if it weren’t for the camera-exaggerated glare you could also see how bright and sharp the “high end” gS165 Glass Bridge display was looking. I became particularly enamored of the new RMK-9 keypad that gave us hybrid-style control of not just the gS but also the two a6x MFDs…
Yesterday I enjoyed a few hours on Lake Winnipesaukee, New Hampshire, aboard a Boston Whaler 280 Outrage recently fitted out as a Raymarine demo boat. Much of what I first saw introduced in Miami last February is now shipping and working in impressive ways. Note, for instance, how the “low end” Dragonfly sonar/plotter is holding bottom in DownVision mode at more than 106 feet and 28 knots. And if it weren’t for the camera-exaggerated glare you could also see how bright and sharp the “high end” gS165 Glass Bridge display was looking. I became particularly enamored of the new RMK-9 keypad that gave us hybrid-style control of not just the gS but also the two a6x MFDs…
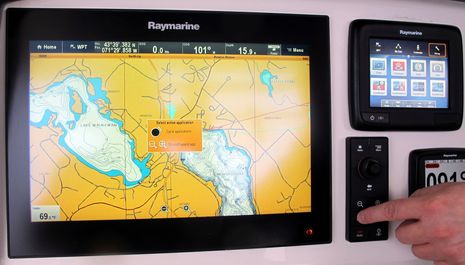 Since the install is still being fine tuned, I got to see how easy it was to go into each of the a-Series setup menus and pair it with the RMK-9 keypad. Then we could use its “Switch Active” button to flip from screen to screen, including individual windows if a screen was split. While I wrote recently about how I found even a little a65 all-touch interface quite usable on Gizmo — and about how the all-touch a Series has expanding in sizes and models — I can also picture where a keypad like this could be very useful on certain boats or helm situations.
Since the install is still being fine tuned, I got to see how easy it was to go into each of the a-Series setup menus and pair it with the RMK-9 keypad. Then we could use its “Switch Active” button to flip from screen to screen, including individual windows if a screen was split. While I wrote recently about how I found even a little a65 all-touch interface quite usable on Gizmo — and about how the all-touch a Series has expanding in sizes and models — I can also picture where a keypad like this could be very useful on certain boats or helm situations.
 The RMK-9 is compact but still seemed easy to use without even looking at it, mainly because of the big-button style Ray has adopted in recent years. In fact, the buttons and knob/joystick UniControl array are almost a duplicate of what you’ll find on MFDs like the larger e Series, though it also comes with an alternate face plate so that it can be installed in landscape mode (as I photographed in Miami and also seen in parts in the drawing above). So far the keypad is only shown at Raymarine.com as a gS Series optional feature, but it’s clearly part of Ray’s enormous a, c, e, and g mix-and-match game plan, as is also indicated by its clever multiple power sources.
The RMK-9 is compact but still seemed easy to use without even looking at it, mainly because of the big-button style Ray has adopted in recent years. In fact, the buttons and knob/joystick UniControl array are almost a duplicate of what you’ll find on MFDs like the larger e Series, though it also comes with an alternate face plate so that it can be installed in landscape mode (as I photographed in Miami and also seen in parts in the drawing above). So far the keypad is only shown at Raymarine.com as a gS Series optional feature, but it’s clearly part of Ray’s enormous a, c, e, and g mix-and-match game plan, as is also indicated by its clever multiple power sources.
If you have a gS Series MFD, all it takes to wire the RMK-9 keypad for data and power is that relatively slim RayNet cable (#8 in the drawing above) because the gS has three power over Ethernet (POE) ports. If you’re using a, c or e MFDs or an Ethernet switch without POE then you’ll also need to use that STng style power cable (#7). I’m told that the RMK-9 retails for $249.
 What’s really exciting about those POE ports, I think, is the prospect of plug-and-play IP cameras that will then be accessible anywhere on the boat’s a/c/e/g network. Apparently some Axis network cameras can be set up to do that now, but it should get especially interesting when FLIR marine IP cameras emerge (as one expected result of FLIR’s Lorex acquisition). Furuno deserves credit for spearheading IP cam and MFD integration, but it looks like Raymarine may take it to a new level. The new Lighthouse 7 software, for instance, supports video recording and playback on the a/c/e/g family and you can also take snapshots with the attached video camera.
What’s really exciting about those POE ports, I think, is the prospect of plug-and-play IP cameras that will then be accessible anywhere on the boat’s a/c/e/g network. Apparently some Axis network cameras can be set up to do that now, but it should get especially interesting when FLIR marine IP cameras emerge (as one expected result of FLIR’s Lorex acquisition). Furuno deserves credit for spearheading IP cam and MFD integration, but it looks like Raymarine may take it to a new level. The new Lighthouse 7 software, for instance, supports video recording and playback on the a/c/e/g family and you can also take snapshots with the attached video camera.
Note that the gS also supports two analog cameras, one via that big power/0183/video port at right above and the other via the light green alarm/video port. Aside from the white STng/N2K and three POE ports there’s HDMI output (so you can watch those camera videos on your big TV screen, too) and an USB port that provides power and data connection to the separate twin micro SD card reader that comes with the gS.
 Another feature of Lighthouse 7 is MFD autopilot control that works with many Raymarine pilots. You can see the “Pilot bar” at the bottom of all three screens in the top photo. And with a new Evolution AP a dedicated control becomes an option. In fact, that Evolution setup screen on the a65 above was more informative than what could fit on the demo boat’s p70R control head. But note that you will need a p70 if you want the pilot to steer fishing patterns or to a wind vane. Note too that AP control has been disabled in the RayRemote and RayControl apps, and users with only all-touch a and g Series MFDs are strongly encouraged to add something like the RMK-9 keypad with a dedicated Standby button – which all makes sense, right?
Another feature of Lighthouse 7 is MFD autopilot control that works with many Raymarine pilots. You can see the “Pilot bar” at the bottom of all three screens in the top photo. And with a new Evolution AP a dedicated control becomes an option. In fact, that Evolution setup screen on the a65 above was more informative than what could fit on the demo boat’s p70R control head. But note that you will need a p70 if you want the pilot to steer fishing patterns or to a wind vane. Note too that AP control has been disabled in the RayRemote and RayControl apps, and users with only all-touch a and g Series MFDs are strongly encouraged to add something like the RMK-9 keypad with a dedicated Standby button – which all makes sense, right?
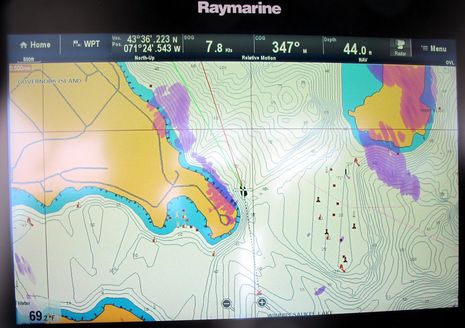 The demo boat did have Evolution installed and working with its twin Verado 250 outboards, but that demo did not go as well as it might have. Before we left the dock an enthusiastic marketing director thought it would be a neat idea to factory reset the Evo so I could see how easy it is to install. While it took only a few minutes to do the dockside setup and the AP performed pretty darn well right away, the much heralded needs-no-calibration EV sensor core did not seem to calibrate itself accurately during our short cruise. Hence, the offset between Heading and COG lines and between chart and radar overlay on the screenshot above. Apparently it had been working “perfectly” before the reset and part of the Evolution concept is that it constantly adjusts and improves itself. Besides, I’ve had an EV-1 sensor on Gizmo’s main NMEA 2000 network for about two weeks and a hundred miles cruising and I’ve been very impressed with stable, accurate heading in all directions as well as stable pitch and roll info (with no setup or calibration at all).
The demo boat did have Evolution installed and working with its twin Verado 250 outboards, but that demo did not go as well as it might have. Before we left the dock an enthusiastic marketing director thought it would be a neat idea to factory reset the Evo so I could see how easy it is to install. While it took only a few minutes to do the dockside setup and the AP performed pretty darn well right away, the much heralded needs-no-calibration EV sensor core did not seem to calibrate itself accurately during our short cruise. Hence, the offset between Heading and COG lines and between chart and radar overlay on the screenshot above. Apparently it had been working “perfectly” before the reset and part of the Evolution concept is that it constantly adjusts and improves itself. Besides, I’ve had an EV-1 sensor on Gizmo’s main NMEA 2000 network for about two weeks and a hundred miles cruising and I’ve been very impressed with stable, accurate heading in all directions as well as stable pitch and roll info (with no setup or calibration at all).
I also saw Evolution handle fast turns nicely and create just a slight track bump when one engine was disengaged at about 12 knots. And we did get to Lady of the Lake, a well known dive site where the Dragonfly did a nice job of imaging the 125-foot steam ship that sank in 1895. One of the crew who has dived the wreck said that there’s a large hole in her deck and I kind of thought I could see it in DownVision, not to mention the fish hovering above. Let’s heard it if you have questions about this new Raymarine gear, and especially if you’ve had more chance to try it than I had.











I’m definitely getting old. The first version of the entry had the big MFD as a gS125 when it’s actually a gS165. I knew it looked good but underestimated its size, which may be a modern phenomenon?
I also heard from the Raymarine demo (and video shooting) boat team that the Evolution did “auto linearize” itself after I left, which fixed the radar overlay and COG/Heading discrepancy on all courses. Apparently the developers in the UK are working on an explanation of how that process can vary boat to boat and we’ll get a link soon.
Ben,
After consulting with our autopilot development team, we’ve learned a few things about the logic inside the Evolution EV sensor core that explains our post factory reset heading anomaly that should be of interest to your readers. Out of the box or after a full reset the EV sensor core automatically linearizes itself, normally achieving a baseline calibration in 1 to 2 minutes. The EV sensor then continues to monitor and improve from there. The exception is when the EV sensor senses less than ideal conditions for linearization. When this happens the EV sensor actually pauses the linearization process and waits for conditions to improve.
It turns out there are some different conditions that can cause the EV sensor to pause its initial linearization process
1. Boat speed less than 3 knots.
2. Boat speed greater than 15 knots.
3. Rate of turn too low.
4. Sensing a large magnetic anomaly
During our Sea Trial on Monday we removed the existing baseline calibration by doing a factory reset. Next, we got underway and had conditions 1, 2 or 3 in play almost the entire time. As you noted Evolution did a great job of holding course and passed the single engine test quite well. However we did see the discrepancy in the heading vs cog because Evolution had paused its automatic linearization process. Here is why:
We left the dock at no-wake speed (too slow), on a mostly straight course across the lake (no significant rate-of-turn), and then ran fast (too fast) to demonstrate Evolution’s high-speed tracking and get over to where the Lady of the Lake Wreck was located. At the wreck site we made lots of circles (going too slow again.) Then we headed back to the dock going too fast and too straight again!
After you left we took the boat out again for a video shoot and Evolution’s automatic linearization process completed and the heading anomaly was gone. So lessons learned…proceed at a moderate pace, exercise the steering wheel more, and never let the marketing guys reset the autopilot!!
Thanks
Jim Hands
Director of Marketing
Raymarine
Thanks, Jim. That also makes sense with my EV-1 experience on Gizmo. Right off the bat I was making medium turns at medium speeds getting out of the harbor and yacht gawking, and once we settled into route cruising EV Heading seemed good to within a few degrees wherever we turned.
So maybe another lesson is that while Evolution does not require a tedious and often difficult 2.5 circle calibration on flat water at a steady RoT, it may be a good idea to do a couple of mid speed donuts with a new install. Also, if we could do a replay I might have spoken up something like, “Um, Jim, maybe should see how the techs set it up before you mess around.”
Interesting – I just installed an Evolution on our Tayana 48, and took a trip up to the yard and back (over a couple weeks) as the “sea trial”. Total distance is about 20 miles RT, with several turns along the way (Emeryville up to KKMI in Pt. Richmond, SF Bay) Right out of Emeryville I did a couple circles both ways at about 5-6 knots, but discovered the compass/radar synch was off about 10 degrees after I straightened out. I did a compass calibration twice, and that helped, but the heading vs chart calibration was off by significant (and different) amounts at different headings all the way there and back. I’ll be out again on Friday this week, and I’ll run through it all again, but I was not impressed with the initial outing. Other than that, however, the pilot did VERY well – noticeably better than my old j300X/AP22 that the Evolution replaced.
Now I’m crossways with Navionics because the initial update on my “All US” Gold chart chip is so huge it is impossible to get it downloaded before their server times out (and the 100 mB setup files came easily in a few minutes).
I’m sure it will get sorted out sooner or later..:-)
On the photos it seems A series MFDs now have black bezel instead of silver bezel ? Great ! Will it be available as option ? Thanks. (Still using his old C70 😉
Laurent, I guess it’s possible that black bezels will become an available option, but the ones on the demo boat are apparently the result of Krylon spray paint and the aesthetic initiative of the installers 😉
I like the look myself and think that helm would be even sharper if Whaler or Raymarine had used a black panel inside that nice dark-gray trim piece.
Has anybody tried mounting the evolution system in a steel boot.
Is it possible to the sensor bellow deck without affecting accuracy?
Hi Easymatic, I’m pretty sure that the EVO nine-axis sensor package actually contains three three-axis sensors, one of which is magnetic. The install instructions seem to bear this out:
“Location must be at least 1 m (3 ft.) away from any source of magnetic interference, such as compasses and electrical cables.”
Apparently the gyro and acceleration sensors along with a lot of computational power can automatically compensate for a certain amount of magnetic interference. The Evo package can apparently also handle a fair amount of boat motion so it’s OK to mount one on deck or higher, which is probably the recommended install on a steel vessel.
Manuals here: http://goo.gl/aieO07
Hi Ben, thanks for your help. So I understand the deviation coming from the steel vessel itself is compensated digitally however stronger influences like electric wires and magnets should be kept at 1m distance. I hope people with steel vessels with first hand experience can confirm! Cheers, Frank
OK, Ben here’s what I have..:-)
I installed the Evolution system on our Tayana 48 in July,and did a couple of shakedown cruises up & down SF Bay (had to go up to the KKMI yard in Pt. Richmond, plus a couple days out sailing around).
Note that my previous AP22/J300X autopilot was using a Raymarine hydraulic drive, and we retained this drive with the new Evolution. I did have to change out the rudder sensor, and I put the Evolution sensor in the same spot as the olde fluxgate compass had been, which was below the sole in the aft stateroom – about 8′ aft of the engine, and maybe 8″ above the hull, midway between the dripless bearing and the SS strut underneath.
Subjectively, the Evolution worked better than the older unit – 1 and 2 degree corrections were meaningful, and stability/course keeping on a straight course was noticeably better. Navigating in & out the channel from Emeryville was very easy, for example. The only fault I found was noticed because of the other new electronics I had installed – an e95 and HD radar. Registration of the radar to the chart was good on all headings except Northerly – within 20 degrees or so of North (I didn’t resolve this like I should have) it showed significant error (10 degrees or perhaps a bit more). I attribute this to some sort of magnetic anomaly on my boat that exceeded the sensor’s ability to compensate out. I did a number of circles, etc. iaw the manual, but the anomaly remains.
I am going to investigate moving the sensor to a different location, further from the engine, shaft and prop.
Have had the Raymarine Evolution autopilot instaled on my 11m steel hull boat from 1976 and it works great. Very impressive! The puck sensor is positioned in the cabin right beneath the steering wheel next to the fuses and under a whole bunch of wires. This does not seem to affect precision in any way.
OK, I moved the Evolution sensor, and all the “Northerly” glitches have dissipated. As I said earlier, the initial location was under the sole in the aft S/R, where the fluxgate had been, about 6′ aft of the engine. I moved it basically vertically about 7 feet – it’s now in the overhead perhaps 6″ forward of where it was earlier, about 24″ aft and below the helmsman’s butt at the wheel. While there were a few 1-2 degree misalignments, once I had it calibrated (I scrammed it and started over) it was basically dead on on all headings – including North!
Raymarine’s R4 EVO autopilot update looks great:
http://www.raymarine.com/content/?id=17621
Among other improvements the 9-axis sensor can now stabilize wind data. I hope that Hartley and others try it and report back 😉