
Aboard Tranquilidad, more adventures with N2K (& Raymarine)

Regular Panbo readers may recall that Jeremy Anwyl wrote a 2011 guest entry about his efforts to bring some stability to his admittedly complex NMEA 2000 network. Back then, he was focused on the backbone, minimizing voltage drops, managing reflections and so forth. Anwyl continues to enjoy using his lovely Beneteau 57 Tranquilidad as an electronics lab, but he’s also finding bugs in new places…
Jeremy Anwyl: Since I wrote that entry I have learned that I may have been focused in the wrong area. The backbone is certainly important, but even the best setup won’t help if the devices themselves are at fault. I haven’t seen this discussed much, but my impression is that many first generation NMEA 2000 devices were not really up to the task of playing nicely with other devices on larger networks. Maretron gear has always been pretty good, Furuno as well, but the Lowrance LMF displays and EP85 storage devices, not so much. A bit better were my Airmar PB200 and Floscan devices. (Generally, the worst that would happen is that these devices would randomly drop off the network.)
My experience with Raymarine devices was particularly frustrating — especially with the ST70 displays. They would reboot or freeze; not occasionally but all the time. When a display was frozen, the only way to fix the problem was to power down, then re-power the network. It wasn’t just the ST70s. The original E-series had all sorts of problems when connected to a NMEA 2000 backbone. The newer widescreen MFDs were better, but they would still reboot repeatedly and drop off the network from time to time. (I also found them to emit a noticeable high pitched whine.)
Firmware upgrades failed to remedy these issues and eventually I realized that hardware issues really could not be fixed — at least with that generation of hardware. That lead me to the painful conclusion that I needed to upgrade the troublesome hardware. Some readers might question my judgment, but I decided to stick with Raymarine. I had an investment in AIS, SPX30 pilot, radar, Sirius receiver, and depth sounders that — with the exception of the DSM300g sounder — were working very well. (The sounder suffered from the common “lost connection” problem.) I have also found there is a good market for used Raymarine equipment on sites like eBay, which takes much of the sting out of buying new hardware.

So when Raymarine introduced the i70, I purchased one to test. The good news is that I found the device to be rock solid. I now have swapped out five ST70s for i70 displays and none have ever locked up or rebooted. (I have a few ST70s left that I have running on a small Seatalk bus. They seem quite reliable as Seatalk instruments.)
Next, I had to confront the issues with the E Wides. These have obviously been replaced by the newer e-series MFDs, which like the i-series instruments seem to be from-the-ground-up beneficiaries of the deep R & D pockets of Raymarine’s new owner FLIR Systems. I had two wide screen MFDs. One E120W at the helm and an E140W, set as the master, at the cockpit navigation station. (Our Beneteau 57 sailboat is a center cockpit design, but has a hard carbon t-top that turns it into something of a pilot house. We do most of our navigation work in the cockpit with PC based navigation software at the inside navigation station.)

I started by replacing the E120W with the e125. At the time, there was no replacement for the E140W, so the new e125 was set to run in “compatibility” mode with the E140W as the master. (Raymarine has a very ominous looking set of instructions concerning the running of a new e-series with an older E-Wide, but I experienced no problems with this set-up.) The best news is that the new e125, like the i-series instruments, is very stable.
There are a few things I found during the installation that are worth noting. I work in the technology industry and looking at these new devices, I can see that Raymarine has adopted two “best practices.” The first is the idea that less is often better. Apple started this trend when they took away a floppy drive on the original iMac, and it didn’t stop there. So on the new e-Series, don’t expect to find a SeaTalk port. Raymarine also took away one NMEA 0183 port. Neither will be missed on new installs, but if you are upgrading, you may need to get a SeaTalk ng to SeaTalk adapter to get data to your SeaTalk devices. (I have a couple of these running; they can get tripped by complex data, like ground, true and apparent wind when all are on the bus, but generally work OK.)
The second “best practice” Raymarine has adopted is to reduce software features in order to hit a deadline. Generally this is a good idea, but you may find that one of the features that Raymarine chose to eliminate (or delay) was one you were expecting. To be fair, of late, Raymarine has been great about releasing new software. We are already up to version 5.x and each update either adds back old features or in some cases entirely new goodies. (Like the fuel range ring in the last update.)

There are a couple other issues I ran into when upgrading. The first is really just an observation: Counter intuitively, the new e125 is actually smaller than the E120W. This means that existing cut outs, pods, etc. will have to be repaired or replaced. (Since I installed my e125, Raymarine has introduced a range of bezels that make upgrading from older C/E-series and C/E Wides easier. I have the e125 installed in a Nav pod above the helm and would have probably still have replaced the pod as the new pod is more compact.) The second is more of a quibble. Emulating Apple’s move with their new Lightening port, Raymarine has introduced a new port to replace SeaTalk hs. It is called Raynet and seems to be a good example of a solution looking for a problem. Raynet is still an Ethernet based network and the only change (other than the name) is the physical connector. Of course, my boat already has runs of the older Seatalk hs cables, so I needed an adapter. (I ended up cobbling one together using a Dremel tool.) Since I installed my e125, Raymarine has introduced a complete line of adapter cables. So now if you are planning an upgrade, you just need to factor in the cost of an extra cable.
My biggest issue with Raymarine and the e125 has to do with WiFi. Raymarine has released a few apps for tablets or smartphones that repeat the MFD screen, via WiFi. Cool, huh? The problem is that Raymarine decided to only allow a connection via a unique SSID. This means that if you already have a ship’s WiFi network, you will be switching from one WiFi network to another (and back). As an example, one the features that is still missing from the new e-Series is the ability to control Sirius Satellite radio from the MFD. (This is “rumored” to be coming mid-Q1.) The “solution” is to connect satellite radio to your stereo directly instead (and pony up for an extra monthly subscription). I did this with my Fusion 700. Like Raymarine, Fusion also offers cool apps for controlling the stereo.
The problem is that I have NMEA 2000 data available on WiFi via a SeaSmart adapter. And I can control the stereo via the Fusion app. And, of course, I have Internet — all on the ship’s WiFi network. But if I want to see what is happening on my MFD, I have to switch SSIDs. In practice, this is too much trouble and my Raymarine apps just don’t get used. (Hint to Raymarine: You need follow the lead of Furuno and make your WiFi more flexible.)

Most recently I received a new e165 MFD. Unlike the e125, this unit fits exactly in the cut-out for the older E140W. (Which I again quickly sold on eBay.) Like the e125, the e165 is a solid piece of hardware. Much faster than the Widescreens, brighter displays and a clean new design. In the case of the e165, the screen is huge.
The e165 seems more stable than the e140, but as it is the system master, I have found a couple wrinkles. The first is that on a recent 36 hour trip — the first with the e165 — from Cabo San Lucas to Puerto Vallarta, the unit did reboot once. (This is much better than the E140W that would only go around 3 hours between reboots.)
The second wrinkle is a bit trickier. During this trip I was seeing a “lost GPS” warning and occasionally the boat heading would be wildly different than the actual heading. I traced these problems to the NMEA 0183 input. I have a small NMEA 0183 subsystem with a Garmin 300 VHF, an iCom 802 SSB, a pactor modem, AIS data and a PC with navigation software all connected via an Actisence NDC multiplexer. NMEA 2000 data is bridged to these devices via an Actisence NGW.
The problem is that I also need to connect the Garmin 300 VHF and the e165 via NMEA 0183 for DSC functionality. Connecting the e165 to the NMEA 0183 output of the NDC looks like it creates a data loop, or some such problem. Raymarine says that when data is available via NMEA 2000, the MFD ignores NMEA 0183 data. This doesn’t seem to be entirely accurate. I have been experimenting with filtering data on the NDC, but because it has only one NMEA 4800 baud output, this is limited in value. Short of not connecting the e165 to the NMEA 0183 data stream, it seems the only fix would be an entirely new NDC multiplexer. This would be used exclusively for the e165 and would allow both input and data to be filtered. (Limited to DSC data.).
This points out a couple things: The first is that even today, boaters are still stuck using NMEA 0183 for VHFs and other “legacy” devices. It doesn’t look like the equipment manufacturers have fully thought through how all this should work.
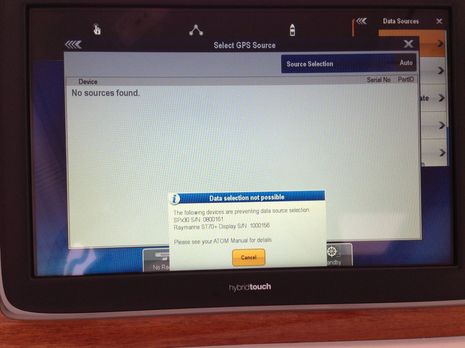
The second is that Raymarine still has some work to do with their NMEA port software. It is possible to filter data out, but not data in. (All I need is DSC data.) The e165 also has a feature that allows you to select data sources–which if it worked would seem to offer a solution. The problem is that when I try to select a device, I get a message that there is a conflict and to refer to my Atom manual for more information. (Anyone have an Atom manual they care to send me?) Strangely, even with these errors, when I select the device selection to manual, even without the ability to select a device the NMEA 0183 issues stop. (Apparently, this data source selection is only designed to work with the Raymarine’s latest NMEA 2000 devices. Systems with ST70s, SPX pilots, etc. will get the errors messages I experienced.)
And I should probably note that one previous feature is still missing from the new MFDs is the ability to transfer waypoints and routes via NMEA 0183. This can be important if you are using a PC as a backup navigation system. (It might be possible to transfer via Seatalk, but as I noted, the e165 doesn’t have a Seatalk port, so you will need the Seatalk to Seatalk ng converter. And if you want AIS data on the PC, you will need a multiplexer as well!)
I should put all this into perspective. The latest generation of Raymarine equipment is vastly improved. Many boaters will never run into the issues I have. And even for me, the kinds of things I run across are much more manageable than the issues of just a few years ago.
With all the good stuff Raymarine has been releasing over the past year, there are a couple things I would still like to see. The first is a Seatalk ng/NMEA 2000 version of their wireless smart controllers (With a color screen please.) Garmin’s new wristwatch controller/display has reset the bar in this area.
The second is a long overdue upgrade to Raytech Navigator. They did release Voyage Planner, but I have found that to be slow, buggy, and it won’t work with my chart library. Plus, it is really just for route planning anyway. (Fugawi has released Marine 5, which apparently connects to the new MFDs, but there is no trial version and I have not given it a try.) I am still running Raytech 6.2 at the inside navigation station, getting data via NMEA 0183. It is much better than Voyage Planner, but is looking very old school. A snazzy new version that was connected via WiFi would be great.
Oh yes, don’t forget about fixing the limited WiFi on those MFDs…

When not cruising or tinkering aboard Tranquilidad, Jeremy Anwyl is Vice Chairman of the automobile information site Edmunds.com.










If I were the owner of FLIR/Raymarine, after reading this and without knowing you personally, I would offer you a position as head of product development. And if you accepted, I would fire my existing head of product development 😉
On a more technical side: In your old entry, you had described problems with termination of the PB200 at the mast head (there was none) and how you combated that by adding an inline terminator at the mast step below deck.
When I ordered my own PB200 I was extra careful to get a cable with termination as I was afraid this would not be marked on it and I would never know for sure. I then learned that Airmar puts termination into all cables over 6 metres and I found a reassuring piece of yellow shrink tube near the connector stating clearly “this connector has built-in termination”. So Airmar seems to have learned from your experience.
But following your example, I still added an inline terminator at the mast step, thinking “the more the better”, or, more specifically “one too many is better than one too few”.
I turned out that it didn’t work with the additional terminator. The PB 200 appeared to not exist at all. Only when I removed the terminator did it work.
In the 2012 season, I had the PB 200 disappear on one occasion (exactly one). At this time, it would not come back on even though I cycled power. But the next morning, it was back and has never failed since. My PB 200 has it’s own power tee so I can power it up or down independently. So when I cycled power, the rest of the bus stayed powered up. Overnight I had everything powered down so maybe this is why it came back to life the next morning.
Not sure I would want that product development job! I do think Raymarine–and other manufacturers–could benefit from a bit more time with retail customers. (Particularly in the beta testing phase.) Things are a bit different in the real world than the lab. 🙂
Another thing that I am constantly surprised by is the gap between assurance in brochures and what products are actually designed to do. I remember trying to get my ST70s working with the original e-series over NMEA2000 and being told that was an “illegal combination.” (Obviously not literally illegal, although that was the term used.) Of course, all the marketing materials clearly showed exactly this combination.
Even today, claims can get murky. Buyer beware, I guess.
I ended up running a new backbone up the mast, that was properly terminated. I also replaced my CAN bus bridge with Maretron’s NMEA2000 bridge.
So I have two bridged networks, separately powered. One networks is for non-critical sensors like temperature and battery monitors. The main network has depth, GPS, speed, etc. Unfortunately I still can’t get the Airmar PB200 working on the primary network. (It drops off the network.) I have a new Weatherstation 200 wx on order and am hoping that this unit will offer improved stability along with performance gains. (I would really like to get it in the some network as the displays to avoid even a slight data latency.)
At least the weather down in Mexico has been reliable. 🙂
Hm, maybe we should organize a PB200 self-help group.
I also had frequent “drop from network” issues with my PB200. I’ve since segmented the network like you, Jeremy, and that has helped a lot. Maybe a few times since.
My PB200 recycles automatically when this happens, but it does take 5-10 minutes.
Did you any performance/reliability difference between your CAN bus bridge and the Maretron NBE-100? I tried both and they worked exactly the same for me. My CAN bus bridge is a ICPDAS i-7532-G.
As long as we are wishing out loud to Raymarine, how about producing a “broadband” FMCW radar!
I participated in a radar seminar at IBEX and got to publically ask senior managers from both Garmin and Raymarine about the possibility of solid state radar. Mind you, both companies already have similar technology within their corporate families. Garmin politely said “No comment” but Raymarine replied “Racked and stacked!” However, no date was given and the manager was later assigned to Siberia 😉
I think I used that bridge originally as well. Both bridges worked–and I can’t say I noticed a real difference
This is a topic very near and dear to my boat. I was a complete newbie when I purchased my boat, so, because it had three existing Raymarine ST-50 instruments, I decided by default that Raymarine would be my choice. Not having loads of money with which to play, I bought most of my bits from eBay, the rest by careful and timely shopping at chandlers. Given my proclivity for pushing boundaries, I have spent a lot of time on the phone with Raymarine tech support.
For several years, it was clear that the tech support people were very frustrated and downright glum. When I’d ask about fixing obvious software bugs in my two E-series MFDs, they’d snap that it costs money that had to be used for other tasks.
Within months of the FLIR purchase, tech support got calmer, friendlier, and more enthusiastic. They spent more time with me working out a problem. And it’s clear that their software team is more robust (and undoubtedly larger) than before.
I personally like Raymarine, in spite of the problems and their proprietary tendencies. And I feel confident that the new Raymarine is going to produce much more timely and usable gear. I’m especially glad to hear Ben’s comment that a solid state radar may be on the way. (That manager may have been sent to Siberia because he revealed something before being authorized to do so — I would get fired for doing that at my job.)
As a long-time software developer myself, I understand the difficulties associated with making random combinations of equipment (of different generations) work together seamlessly. It is a seriously difficult problem resolved only by constant testing and debugging.
Jeremy, I enjoyed reading this. Please write more often.
Jeremy, you have a taller mast than I. How is the PB200 for apparent wind measurement / mast motion correction? (I assume you don’t use it for heading or GPS). Does the PB200 motion correction work very well in rough sea states?
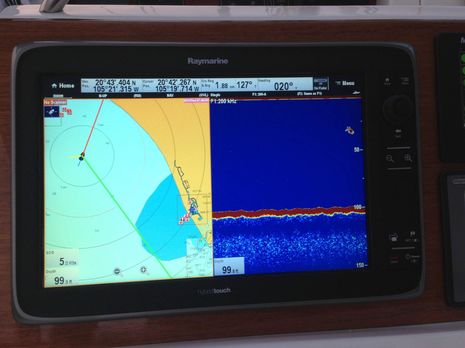
In the picture I see an ST70 dedicated to true wind angle. Did you find, as I did, having the PB200 made a big difference in getting a useful TWA & TWS?
I am not absolutely sure, but the mast head would have to be 70+ feet above the surface.
I really like the accuracy of the PB200. The wind readings are much more stable than with other sensors. I tried the compass and GPS, but as you probably found as well, they is not really usable. (Too much motion at the mast head.)
I use an Airmar cs4500 for STW and combined with the PB200, my TWS and TWA look very good. (I am hoping that with the new 200 WX they will be even better.)
One thing I did notice: I originally had the PB200 set up to transmit apparent, true and ground wind. I shut off the true and ground wind as the Seatalk to Seatalk ng converter would confuse apparent and ground wind. The indicator on the display would jump from one source to the other.
As I said, the easy fix (once I figured out what was happening) was to turn off everything but apparent wind.
A couple comments. I’m in the process of replacing all my instruments with N2K. One of them being the masthead wind vane.
– I’m so far not impressed with some of the newer wind vane mounting options. They need to be robust, yet easily removed for the winter.
– I’m further not keen on running the N2K bus up the mast (particularly with the termination point). I would much rather minimize the electronics at the top of the mast and instead run the analog signals down to an analog-to-N2K converter at the base of the mast. The N2K bus stays within the hull. Are any of the vendors doing that? I recall Furuno comes close, but they require their display be used.
Thanks
Paul, Check out the Raymarine iTC-5, which will take their analogue wind, depth, etc. sensors straight to N2K/STng. But I suspect that Ray will have a native N2K wind sensor eventually (and maybe a TackTick to N2K adapter) and also that there are many pure N2K Simrad, Garmin, and Maretron wind sensors out there now that have never had a problem.
I have not had issues myself with any of those or the PB200, nor do I recall a problem running an ST70 with Ray E Classic, C Wide, and E Wide (though the thing was crying out for updates by the time I took it off Gizmo). Everyone reading Jeremy’s interesting entry should be aware of how large and complex his N2K systems are — like 7 ST70’s at one point http://goo.gl/R0S2g — plus he tends to be an early adopter.
I just had a 2007 Raymarine S2 course computer fail (Seatalk bus died for no apparent reason). Rather than fix it I upgraded to an X-10 course computer. The X-10 they sent me was defective in that for whatever reason it couldn’t handle the compass when the leads were only 7′ long (worked at full length); they sent a second X-10 and it worked fine (I am assuming anyway, as I’ve only done dockside setup and not sea trial yet).
So Raymarine doesn’t get high marks in my book for reliability. With my S2 course computer I would have plotter flashes, GPS signal lost, AP drop to standby, etc. for no apparent reason, usually after the network had been up for 12 to 36 hours when sailing off shore. These sound like classic memory leak bugs to this software developer.
If a vendor started marketing their products as more reliable, rather than just more feature rich, I would stand in line to buy them. For example, if anything goes wrong again with this AP – even if its small – i’m ripping out the entire AP system and putting in a Simrad AP (exceptional reputation for reliability as far as i can tell). New features only make me slightly more happy, but gear not working makes me hate my boat and the company that made the gear. It ruins the entire experience.
End of Rant.
Paul,
These guys are the guys behind the airmar PB/WX tech and are busy creating a NMEA 2000 box that you mount internally and that talks to their NMEA 0183 based sensor.
http://www.lcjcapteurs.com/?lang=en
Another solution is to use a bridge.
Thanks Ben. I did check out the ITC-5. I was told it only works with Ray’s analog wind sensors 🙁 But conceptually that is the setup I’m looking for. With a mast head vane that is rugged AND easily removed.
The CV7 ultrasonic unit looks interesting. How do these units do at the top of a pitching 50′ mast? Accuracy, etc?
All very interesting stuff.
I too ventured down some of these paths recently.
The London Boat show allowed me to preview the Fusion Link app on the iphone and on Raymarine’s stand via a MFD running what must be beta v6 of Lighthouse.
So on my boat I already have one e7d and will be installing an e9 so we have flybridge and lower helm covered. We already have Raymarine radar, and now I buy the Fusion IP700.
Raymarine apparently stopped making a Ethernet switch, but that is easy to deal with.
The question next was how was I going to talk to all this via wifi. A quick email to Fusion tells me you will be able to talk to the Fusion IP700 via the e7d wifi in Lighthouse 6.
This all sounded promising until you realise most of the time I will have the music on, I will have the Raymarine gear off.
OK I think, just put an AP on the lan, Fusion say it will work but will Raymarine? I didn’t get a reply yet. 🙁
Paul:
I had the same wish to be independent from the NMEA 2000 bus to go up the mast.
With a PB200 you have the option of getting a combined NMEA0183 and NMEA2000 cable. That would allow you to use either interface, or, I think, both at the same time. So I got this combined cable and believe I could fall back to NMEA0183 if the NMEA2000 bus in the mast developed problems. It wasn’t needed yet, however.
I think all functions of the PB200 are supported via NMEA0183, even firmware upgrades.
The combined cable actually comes with a box and is called “Splitter COMBINATION NMEA0183&2000 15M CABLE KIT”. JGTech in the UK exchanged the 15m cable in it against a 35m cable. I laid down 199 pounds sterling for it plus something extra for the cable exchange. The box is just hollow plastic, no electronics. I did the breakout with screw terminals not using the box – it didn’t fit my space.
Regarding the mount I had a custom mount fabricated from aluminum which includes a 1” pipe going straight out forward of the mast by 2 feet to achieve a minimum distance from the VHF and AIS antennas. The pipe can be disconnected at the mast and folded over for winter storage.
I couldn’t find a commercially available solution.
Kees:
LCJ Capteurs and Airmar are linked?
More details, please!
Mike:
The Fusion only has an Ethernet port. To connect over WiFi, it needs to connect to a switch and WiFi access point.
From what Fusion told you, I am guessing that the Fusion will be able to connect to a switch on the Raytech (Seatalk hs) network. That will allow the MFD to communicate with Fusion. I suppose that the MFD’s wifi could also allow iPads, etc to communicate with the Fusion.
This all seems a very convoluted way of going about things. Raymarine should just follow the lead of Furuno and others and just allow the use of existing WiFi ssids. Assuming that Raymarine refuses to budge on this issue, there has to be a way to bridge a Raymarine Seatalk hs network and a standard Ethernet network. Anyone have any ideas on this?
FYI, I believe Raymarine still offers switches. I think I saw one that featured the new Raynet connectors and there is also a combined Sirius radio receiver/switch that has the older Ethernet style connectors.
Hopefully Raymarine have/will see the light and V6 will allow any AP on the lan to control the MFD.
Until V6 I guess we have to wait. I’ll look into switches, but any standard ethernet switch will do the job.
P.S.
I don’t think the UK does Sirius 🙁
Kees & other PB200 users … possible source of these kinds of problems is having two devices (the PB200 and one other, like a instrument display or chartplotter) transmitting true wind information, causing a feedback loop that manifests in several ways, including wacky apparent wind information and loss of wind information altogether. The problem will come and go depending on the sequence devices are powered up.
Sounds weird right ?
Typical cup and vane sensors don’t provide true or ground wind, so its up to other devices on your boat to do the math (e.g. STW + AWA + AWS) to output true wind. Some products on your boat listen for true wind information and if not heard shortly after power up, they start broadcasting true wind information at the first moment they successfully listen to apparent wind, and they won’t stop even if another true wind transmitter shows up on the network, until they power down. E.g. for every apparent wind sentence they see, they will transmit the true wind (example ST60 wind instrument display not in repeater mode will do this)
Unfortunately that helpful functionality (automatically calculating true wind) doesn’t always work correct and you end up in a feedback loop that inexplicably screws up the apparent wind transmitted on the network.
For example, if your ST60 starts first, and you turn on your PB200 tens of seconds later, the ST60 will transmit true wind (also) the moment the PB200 starts transmitting apparent wind.
If you start up all your devices together, the ST60 won’t output true wind. If you turn your PB200 off (say for the night) while the ST60 stays on, the ST60 still won’t output true wind when your PB200 comes back on again (which is good, I observed the ST60 only checks during its on power up). Power the ST60 on first, then later the PB200 and problems occur.
I observed the classic E chart plotter behaves different. If no true wind on the network, the e-classic will do the math, display true wind and ground wind, but won’t re-transmit it. That’s desirable harmless that it does the math, because it doesn’t re transmit and create a feedback loop. Perhaps other chart plotters would?. It also seemed like the E classic was flexible in turning on/off that capability automatically based on the presence of true wind on the network, e.g. it would stop the math and use the ST60 result.
The solution to ending these issues is to power them on all together, or better yet, either
(1) disable true wind and ground wind output on the PB200 using Weathercaster software. Or (2) search your devices for one that is also broadcasting true wind in conflict with the PB200, and disable it. (Example, Raymarine ST60 wind instrument has an option to be a repeater, when set it will never inject true wind sentence on seatalk).
Someone mentioned having the PB200 on it’s own N2K segment, I suppose that could help if the feedback loop is somehow prevented, but the solutions above are better.
Note: The cable Kees mentioned that supports N2K and 0183 has some drawbacks. The cable works perfectly, and you can get both outputs if that turns you on. Not a bad idea to send the 0183 output to your VHF radio for example. But if you use the N2K leads, your gobbling up some of the maximum distance limits of N2K.
Dan,
You’ve got me mixed up with Henning wrt dual N2K/N183 cabling.
Maybe your true wind calculation is relevant for you but my situation is different.
I have dual or triple sensors on the network for basically all original nav data:
– Apparent wind from Simrad IS20 on mast top (95 feet in the air) and PB200 on arch at rear.
– GPS from MFD, PB200 and AIS.
– Depth from keel sensor and hull sensor (this is brilliant as we have a varying offset between the two: the keel moves up + down 2,5 m)
As I’m using Navico and not Raymarine displays that works very well. I select sources for what I want to see where.
I’ve got two IS20 displays: one shows depth under keel — how many meters (feet) do we have left to play with before we tack / lift keel? The other shows water depth referenced to water level, for comparison with chart depth etc. The difference shows me how deep the keel is set.
Anyway, my PB200 problem is that it really, really drops off the network. It doesn’t even react to a PGN query (you can induce one by asking your MFD or instrument display to show you a list of sources on the network). I notice this because I use it as the main GPS source: the AIS transmits location only, not DOP (how good the location fix is) and the built-in MFD GPS doesn’t receive much in an aluminium doghouse. I’ve got the MFD on auto-select which means it looks at all GPS sources’ DOP and takes the best one, but since the PB200 is the only one with a valid fix AND a DOP transmission it’s the only one it can choose. So I used to get “GPS fix lost” when the PB200 went missing.
I’ve confirmed that it just stops by logging all N2K data.
As I said before, since I’ve bridged the network and segmented it into two physical networks that problem has been reduced by 99%. This tells me it’s a physical network thing, as the bridge is in ‘stupid’ mode that just re-transmits ALL data on both sides. If it were a ‘logical’ issue as you describe the introduction of the bridge wouldn’t have made any difference.
Dan, I think you also got mixed up about the Raymarine ITC-5. Doesn’t it convert analog transducer data, not 0183, to N2K?
And aren’t your findings about True wind conflict based mainly on experience with your Raymarine gear? I think I recall, and maybe Kees can confirm, that Simrad instruments let you decide if they calculate True or not.
Yes I did, fixed that
The conflict is not specific to the ST60 (which is fixed by a setting on the ST60, or simply insuring both products start up at the same time), it appears with other equipment.
Two folks I helped with the same problem remedied with a PB200 setting (disable true wind out) via Weathercaster. It could be a wild guess on my part, but I suspected the instrument display that formerly had an analog cup/vane attached was the culprit as neither boat had an MFD.
Hi all,
Lots of interesting comments here !
I can give you more details about the CV7 sensor from LCJ Capteurs. Airmar is using the technology behind the previous version(CV3) under licence. The CV7 is an evolution, lighter and with higher data rate and more accurate. It can be used with its standard cable for direct NMEA0183 connection (easy, simple installation, no terminator, 25 m mast cable, 4 mm diameter). Alternatively, a black box allows connection with NMEA2000 compatible instruments. It sends standard PGN data and there is a built-in calibration process with a couple of keys (no need to connect a PC for calibration). The CV-7C version of that sensor is supplied with a vertical mount to place the sensor out of upwash (as much as this is possible…). I know this product for long time, as it has been on the market in France for years.
I didn’t know of this link between LCJ Capteurs and Airmar. In fact, I hardly knew LCJ Capteurs at all, bypassed it at METS and Paris boat show. Probably a mistake. Many or all of the design choices they made seem right to me and better than the Airmar sensors:
– no NMEA2000 up the mast but conversion below deck when needed (weight of Airmar combined cable will be a problem for racers but you could use NMEA0183-only cable with Airmar as well)
– no integrated compass (the masthead is the poorest possible position on a sailboat for a compass; can’t be disabled in the Airmar sensor but can be set to not output data on the bus and true wind calculation in the PB200 can be set to use a different compass, in my case an H2183 at deck level; still uses power, though)
– no integrated GPS (same as for compass)
– model available suited to mount before the mast (I had to spend on a custom aluminum construction and the combination of that and the PB200 is going to weigh 10 times as much as the CV7 sensor and mount)
I never thought I would ever say such a thing: LCJ Capteurs, please invest more in marketing!
Henning,
don’t feel bad recommending marketing efforts ! 🙂
I know there has been changes in that company recently and I think they will follow your advice !
I shall forward your words to them. I agree with you, their technical choices are smart and their products deserve dissemination !
Henning / Olivier,
I see that LCJ now show a CV7-SF wireless mast head sensor unit.
Does any one have any knowledge of this unit and would it interface with a TackTick system?? The refresh rates on the wirelss CV7-SF seem a bit slow at night at 13 seconds??
Hello Paul,
This wireless unit will not interface directly with the Tacktick wireless network but via NMEA0183.
It was originaly developped with shore installations and day boat use in mind. The low data rate is due to a technical choice : there is no battery. It uses a super-capacitor instead for weight gain, reliability and to keep the “no maintenance” spirit of the range.
Hi Oliver
The LJC Capteurs units look interesting, particularly given the lack of movings parts. But I’m wondering how well they will work at the top of a sailboat mast. Can you provide some info as to where they are used on racing sailboats today? For exmple, the Volvo or Vendee or AC or any other high end race programs?
Thanks
Paul, Dan Corcoran races with a masthead Airmar PB200, which is apparently based on LCJ Capteurs tech, and he wrote about his findings on Panbo:
https://panbo.com/archives/2009/02/sailing_with_an_airmar_pb200_-_part_ii_.html
That said, Airmar may be using some heel and pitch compensation that LCJ doesn’t and the “PB” in the product name stands for power boat.
Thanks Ben. What is Dan’s ride and where is he campaigning it? I’m looking for references in which this tech has been proven in high end race conditions.
Paul, pls take this to the Panbo Forum and I can reply there.
Dan’s right that this is getting far off topic, but it would be interesting to discuss why grand prix racers don’t seem to like ultrasonic wind sensors or NMEA 2000.
Hi Paul,
I know a good reference in which the CV7 from LCJ Capteurs is being used : the french skipper Damien Seguin is using that sensor on his Class 40. He made a second place in the Transat Jacques Vabre 2011 with that equipment. I think his new boat will be fitted with a CV7 again. http://damienseguin.com/
The design of the CV7 does compensate pitch and roll without any other measure source. This is due to its shape.
Find quite a bit of experiences shared here 🙂
So, I’ll just launch my query:
we have a Raymarine E80 plotter, and a PC connected via the HS bus.
We often have issues of the PC not being able to talk to the plotter. We’ve found that the Pc should be powered up at least 5 minutes before even launching the Raymarine programme (and afterwards we found a reference/confirmation to this in the manual (which of course we read as a last resort :-P)).
My question is however, why? What network component takes 5 minutes before it’s operational? is it the autoIPconfig of windows? (We have a fixed IP on the PC, but the autoIPconfig remains on by default in windows)
It’s pretty annoying and doesn’t inspire trust in the entire setup?
Thanks beforehand for any comment/ideas!
Regards,
Kris De Pauw
I have a Jeanneau 50DS with a E120w and E90w. I would like to add (replace) the E120w with a E125. My biggest issue is the size of the icons (buoys) which are so small its difficult to read them. If I add the E125, will this by itself allow enlargement of the icons using the same Navionic charts or is it a question of the Platimum Plus charts causing the reduced size. Raymarine says there is no fix for the E120w icons so I guess my question is if I use both the E125 and E90w will the E125 hardware remedy the problem on that unit. This is not a problem with the classic e120. a little rambling, but thanks.
Good you asked! The Raymarine gS125 and a77 displays I’m currently testing also show nav aids icons on Navionics charts at quite a small scale at many zoom levels, so I don’t think a hardware upgrade is your solution.
What helps me with this is putting the chart window in “Easy View” mode, which scales up nav aids and some depth soundings. It’s not perfect because Easy Mode can also eliminate some useful chart info from view but I think it’s available on your E Wide displays and may help.
Also, pay close attention to upper and lowercase series names. I believe that your E Wides are the last of the upper case E’s and that unfortunately means they run different software than all the e, c, a, and gS displays introduced since. Don’t presume any networking capabilities between your E and the current e (or other lower case) displays unless it’s specifically vetted by Raymarine.