
Airmar H2183 compass, best in class?
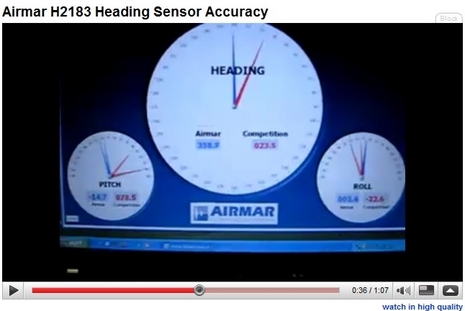
Airmar’s new H2183 heading sensor is motion compensated every which way; i.e. it’s a 3-axis solid-state compass integrated with a 3-axis accelerometer and a 3-axis rate gyro. That’s news both in terms of real world compass precision and the masthead performance of Airmar’s PB200 Weather Station, whose gyro only senses yaw. In fact, while Airmar is pleased with the how well the PB200 seems to work on Dan Corcoran’s sailboat, it may not promote the Weather Station to sailors until it can produce a model that incorporates the 3-axis gyro. But the H2183 is shipping now, for about $700 retail, and Airmar claims that its accuracy in “dynamic conditions” — i.e. on a boat in a seaway — is “best in class.” And it’s backing up the claim with the side-by-side testing video snapped above. While the “competitor” compass is not clearly identified, it’s almost undoubtedly Maretron’s well regarded SC200. The performance gauntlet is slapped down! And if Maretron or Simrad or whoever has a rebuttal, Panbo is ready to run it.
While I can not personally attest to H2183 performance, I’ve seen the unit and was quite impressed with the mounting system. The bracket can be fixed to any vertical bulkhead regardless of orientation, because the compass itself can be spun any which way in the bracket so it’s aimed at the bow. In fact, you only need to ease up on two thumb nuts to fine tune it. That’s dang clever, as is the flexible way Airmar incorporates both NMEA 0183 and 2000 data in one cable that can terminate to multiple plug or combiner/splitter box options. I’m getting personal experience with that data/cable scheme because it’s also employed on the PB200 — which I’ll discuss soon — as well as Airmar’s new GH2183 GPS/Heading sensor, which is cousin to both.









Looks like a simrad compass:
http://www.jmsonline.net/SIMRAD-RC25-RATE-COMPASS-22084438-(OLD-RFC35R).htm
The PB200 already has a 3-axis accelerometer and a 1-axis rate gyro as well as an onboard GPS. For purposes of correcting the True Wind Speed and Direction, would going to a 3-axis gyro really help? It could be that the H2183 is meant as a stand alone unit and that the PB300 is way out there.
It lloks impressive but for normal navigation (ie: connected to autopilot) why is pitch and roll so important?
Ben,
Looking at the video, the test “boat” is rotating in only one dimension, so how is it measuring angle of rotation in two?
Thanks,
John
John,
Unless the compass is perfectly aligned with the fore and aft rocking, then it will be picking up two dimensions.
Impressive demo, but… The pitching is way too fast for any boat I’d want to be on. It’s good that Airmar does well in these conditions, but in more normal conditions the difference might not be so obvious. It would be nice to try this yourself. Does mounting it closer to the CG help, does it still work well when mounted on a much higher mast?
After looking at pictures of heading sensors on the internet, my wild guess is that the competitor is a Simrad. The Maretron SSC200 is black. All the more reason to repeat the test in the lab.
I changed the screen capture to show how both sensors are detecting changes in pitch, roll, and heading, one a lot more than the other. I agree that the rocking horse test bed creates pretty extreme movement, but then again a seaway produces motion in all directions too, even when one axis seems predominant, especially high up.
First, is this product shipping in production quantities, or is pre-release PR hype?
Second, marketing claims are cheap to make and essentially meaningless these days. I hate to sound so jaded, but to quote The Who – “Won’t get Fooled Again”.
When some objective tester runs this through it’s paces in real world conditions against the real competition that is in the market place, I’ll pay attention. Until then, it’s just a press release.
I am writing to comment about the mounting system Ben wrote about.
I have only installed, not evaluated the H2183 (boats on the hard), … but the first thing I noticed was the great mounting system.
Ben was very verbose and right on about the mounting system … considering there is just not much to say … it goes from out of the box to installed very painlessly. Same with the N2K connection. When I plugged it into my Raymarine e-series, it just worked, making my first N2K install seem like child’s play.
Comparatively just relocating the flux-gate compass included with my autopilot, in an effort to get better accuracy, took 10x the install effort mostly due to the efforts to pull apart sections of my boat to just find a compatible surface that meet the installation manuals requirements.
Ben: can you provide any more information on your suggestion of an updated Airmar PB200 more specifically designed for a sailboat masthead (i.e. with a 3-axis rate gyro)? In particular, is such a product actually in the works or is it more speculative?
The rocking horse demo is impressive, but such motion is not at all extreme or inappropriate compared to the motion of a sailboat masthead in a seaway. (As anyone who’s had to climb a mast at sea can attest.)
Well, I spoke directly with Airmar’s product/marketing people (even taped the conversation with my magic Pulse pen), and I was careful when I wrote that they “MAY not promote the Weather Station to sailors until it can produce a model that incorporates the 3-axis gyro.”
So they were not definite about the change, and it sounds like they’re still working with beta testers like Dan and others to fully understand the PB200’s real world performance. And doing their own testing. There were various Weather Stations and compasses on board the Airmar boat I went out on last summer, all hooked up to the same comparative data analysis software you see in the video.
My impression (unlike that of certain cynical Panbots I know 😉 is that Airmar tests the hell out of products, while taking their sweet time to actually get them to market. It is, after all, an engineer founded and managed company (like Maretron, and Garmin, and ???).
Hence the SB(sailboat)200 might be the PB200 with a Windex on top, or might have the 3-axis rate gyro added, or who knows what… and I wouldn’t venture a guess as to when, or even if, it will appear.
This is Dan … (from Dan’s Sailboat). The primary focus of my evaluation has been on the wind measurements, and the effectiveness of the motion correction software on my sailboat mast on different points of sail at different wind speeds and when downwind with asymetric sails. When I spotted the improvments of the PB200 over the PB100 I saw the application in sailing I described in the PB200 article I wrote here in February … and was excited to get results better than I imagined.
When it comes to the compass however … if Airmar had not reminded me there was a digital compass on the PB200 a few days before my boat was hauled for the winter, I wouldn’t have even evaluated it beyond my original test to see if it was good enough for my radar MARPA feature to hold targets (it was). In that additional last day of testing my crew and I compared it to a Raymarine gyro and a Weems and Plath hand compass, on a flat sea. After seeing the results I won’t ever trust my flux gate again for DR navigation practice … but in a sense it isn’t a fair test, the PB200 is up there free from all iron objects, stereo speakers, etc. etc. … and my poor flux gate is subject to a 350+lb Yanmar engine four feet away, battery cables throwing feeding my DC panel 4-5 feet away in another direction throwing off magnetic fields that differ each time the fridge cycles, and all the accessories in my galley four feet the other way. Place a handheld compass on the same spot and the results are +/- 20 degrees depending on my point of sail. The calibration procedure improves upon that … but even though I get a very high level of success reported at the end of the calibtration procedure … the compensation made from the calibration procedure isn’t so good as bared out in my last day test results.
If our thoughts about where a compass should be on a sailboat was inverted (as Ben suggested) … I missed that entirely.
So I ask … is there a real interest in this community in knowing how well the digital compass performs on a swaying 50 foot high sailboat mast? Does a wildly accurate compass heading matter to anyone, or is the COG from your GPS the primary focus (be honest here) or the great circle route calculated by the chart plotter what matters … and a gyro compensated flux-gate compass otherwise good enough? If you want me to do some more digging … tell me how you would use a more accurate compass heading on your boat so I can give this some more thought.
Dan, Accurate, responsive, and fast heading data is very important to boats, for radar overlay, MARPA, autopilot performance, Class A AIS reporting, and probably other things I’ve left out.
It can even effect chart plotting if the plotter itself is fast enough. When I tried NavNet 3D last summer, its amazing performance at speed was slightly less so when we switched from using Furuno’s satellite compass to its flux-gate. The onscreen boat didn’t keep up with the real boat quite as well.
I don’t know for sure, but believe that smart autopilots use heading input to help steer a straight line even when they’re steering to a wind angle. If that’s true, could it be a factor you didn’t realize in your Airmar PB200 testing?
Here is some background info on why what Airmar is doing is important for us. In North America and Europe, one degree of tilt of a magnetic compass will cause 3 to 5 degrees error in compass direction. Greater tilts are common on a sailboat, so the compass errors could be huge if they were not corrected. Traditional compasses are gimballed to avoid this but they still have errors during acceleration. An electronic compass which is not gimballed needs to be compensated mathematically, which requires that the tilt (pitch and roll) be known.
@Ben:
Yes, autopilots generally always steer to the heading input. The wind angle will slowly change the ‘desired’ heading, often accompanied by an indication thereof (for example a beep.)
The ones that I am familiar with also remember the orginal heading when you enable the pilot and go into an error mode when the ‘desired’ heading changes more than a number of degrees from the original heading.
Thanks, Kees, but what I meant was the internal intelligence of the pilot, its ongoing efforts to analyze what the boat is actually doing and adjust its rudder commands so the boat steers as straight a path as possible.
I don’t think it matters if the pilot’s goal is a specific apparent wind angle, a waypoint, or a course; regardless, the pilot still needs good, fast heading info to make good rudder decisions.
Yup, you’re abolutely right. I did not intend to disagree so I my apologies if it came across that way, I only wanted to elaborate on how apparent wind mode works.
Fast accurate heading is instrumental to a pilot because that means it can trust the yawing info it is receiving.
I am about as sure as I can be, that the autopilot was not using the PB200. Raymarine technical support was clear that if another heading source is on the network, the autopilot will ignore it in favor of it’s own fluxgate compass.
As I go to add compass evaluation to my testing, I am wondering how to capture the multiple compasses all at once with some software. It would seem the flux gate I will have to pick off with NMEA-0183 output, for the PB200 and H2183 will I be better served with them wired as 0183 or 2000 ?
I apologize, I answered incorrectly just above.
When going through my PB200 test notes, planning more testing this Spring, I found that I documented taking the step to disconnect the existing fluxgate and substitute the PB200 heading output directly into the NMEA-0183 input of the autopilot during the testing I described.
Therefore, the autopilot was in fact receiving heading info from the PB200, in addition to, the wind angle to steer by the wind with … which provided extraordinary results.
I was wondering if anyone can address the following questions:
What is the difference between compass products called “rate compensated” and the Airmar, H2183? Is the rate compensated feature as accurate or more accurate then the design of the H2183?
A fluxgate compass like the one sold by ComNav needs a separate add-on unit called a “Heading Rate Stabilizer” to achieve heading information that ComNav says eliminates “Northern turning error”, (whatever that may be). How does northern turning error come into play with the H2183?
Thanks for any help on this
Richard, I believe that Northern turning error is symptomatic of gimbaled compasses. If the heading sensor gets pitch and roll from accelerometers or other tilt sensors, it shouldn’t be an issue.
Hi everyone.
This is Matti writing on 65d30m North, 025d11,1m East. I am tackling with just same problems as You all are.
AIRMAR H2183.
I have purchashed Airmar H2183 with Garmin GI10 display. Transducer itself is mounted on 2,5 meters height from standard bridge in an 24 meter long WWII harbour tug, in magnetically cleanest possible place.
Airmar H2183 is put to deliver heading information 10 times per second and connected to Garmin GI 10 display (compass rose mode).
Airmar calibration has been done with Airmar Weathercaster software, which seems to be the only possibility. I have not (yet) got any answer from Airmar, if there is possibilities to do “tabular calibration” to “feed in” previously steered true or magnetical courses. So, the only way to calibrate Airmar H2183 seems to be turning circles on calm seas.
GARMIN GPS18
As a gps I use Garmin GPS 18-5Hz, which is fast enough to deliver heading information 5 times per second.
SEACLEAR
I use a free program SeaClearII from Sping. Charts are from Finnish Maritime Administration.
In SeaClear I have connected Garmin GPS18 for true heading (only when moving) and Airmar H2183 for Compass heading.
NAVIGATIONAL TESTING
I have started to test Airmar H2183 + Garmin GI10 + SeaClear and Garmin GPS-18-5Hz + Seaclear.
1st TASK
was to make a deviation table. It shows a strong quarter circle error (D-coefficient) which the automated calibration routine inside Airmar WeatherCaster and H2183 could not (yet) correct.
This tells me that I have to seek more properly, magnetically cleaner place above deck. This work will be continued next summer when sea is not anymore frozen.
WHY DO I WANT A MAGNETIC COMPASS HEADING
I want heading information because it simply is the most important parameter of a moving boat or ship.
I also want to connect magnetic heading information to a radar an to a properly (= compass card like) heading display (which is Anshutz Steering Repeater Compass display 133-560).
WHAT ADD ON�s DO I WANT OF MY NAVIGATION SOFTWARE is big compass rose display with two needles, COG-heading line (from gps when moving) and Compass (keel) heading line
Regards Matti
Garmin is selling this too. They call it a “High Performance Marine Heading Sensor” (no Garmin model name, it’s just an accessory) and say it is “based on Airmar H2183”. I’m not sure what the value added is (it costs more).
How about …
https://panbo.com/archives/2009/11/airmar_h2183_improves_situational_awareness_feature_on_raymarine.html
Plus more if the Garmin autopilot uses both the heading and the gyro outputs of the H2183
I need to replace my faulty Raymarine flux gate compass for my autopilot, which has never been great even after a number of calibrations, and has now gone totally wonky.
Can anyone recommend whether the Airmar H2183 or the Maretron SSC200 is significantly better than the other (besides the mounting system, which I believe the Airmar wins hands down)?
Thanks
Evan
I too am looking at these alternatives: Airmar H2183 vs Maretron SSC 200. I want to output heading data on N2K to my NavNet 3D (MFD12) and simultaneously output HDG directly to an autopilot that only takes 0183.
I have learnt that the Airmar H2183 is about the same cost as the Maretron SSC 200, but ships without cables. A special combination cable and junction box need to be separately purchased to supply N2K & 0183 simultaneously…all a bit complicated compared to the SSC 200 which has separate N2k & 0183 ports and ships with an 0183 cable and takes std N2K cabling, without any need for junction boxes, etc.
Actually, my bigger question relates to the rate gyro features of these sensors. What is the right trade-off between getting close to the vessel’s centre of gravity (cog)vs avoiding magnetic fields? The Maretron SCC 200 & the Airmar H2183 both have sophisticated rate gyros, but their instruction manuals still urge locating close to the vessel’s cog. In my stabilizer-equipped motor cruiser, the closer I move to the c.o.g. the more ferrous metal & magnetic fields I have to deal with. If I go “up” to a locker under the flybridge helm, I’m further away from the c.o.g. but completely free of magnetic interference. I would have thought I’d be better doing the latter and letting the rate gyro features do their work….what do others think?. .
I am having excellent results on my sailboat placing the H2183 far forward (80% of he boats weight is behind the compass) and starboard of the center of gravity.
I use the feature of connecting the 0183 direct to the autopilot, and the N2K to my instruments. I didn’t use a junction box, just terminal blocks. You need to choose choose a power source, either thru N2K or direct. I choose direct so that my N2K and instruments can be powered down and I can still run the autopilot.
Hi Evan
Go for the Maretron, it is a fantastic sensor, and setup for magnetic deviation on board is simple (power on the unit and perform 4 complete turns of the boat within the first 8 mins) Additionally because there are no moving parts inside it can be mounted next to ferrous metals (as long as they are stationary, not like a tool bag or dive gear) We always use this sensor via N2K to NN3D and 0183 to a Navpilot.
Note: can only be powered via N2K side.
This is Matthew writing from 65d30m North, 025d11,1m East.
It is good to see that others on lower latitudes are working with those transducers as Maretron SSC200 and Airmar H2183, and others.
After few years of my last writing I have found that:
a) On higher latitudes the inclination angle of earths magnetic field makes all transducers almost useless in bad weather and exellent in good weather. This is based on the fact that on my home waters the inclination is 76 degrees, so the boat has only 14 degrees to pitch or roll before the magnetic flux vector comes from “zenith” of the transducer and after that the heading changes it direction of amoun 180 degrees.
This phenomena has not been taken into account on Airmar H2183 according my sea trials. Airmar does not deny that.
On calm waters both of them work exellent.
On speeds more than 10 knots Northernly Turning Error has no effect on them only as long as the boat itself does not heel. If the boat heels during tacking, both of those transducers became useles because of “zenithing”.
On acceleration and deceleration Airmar is good if and only if heading remained constant.
b) Installation of transducer to the cog or as hig as possible
ba) has effect on magnetic cleaness of environment of transducer and hence on the calibration.
bb) has no other effect on the transducer, as long as the total acceleration of transduder does not exceed transducers maximum values, perhaps 1g (= 9.81m/s2) (which Airmar does not tell). This will not be easily exceeded by sail, but by fast patrol boats it is the main limiting factor.
If You install the transducer in the cog, the angular acceleration remains the same as in mast top but trajectional acceleration ceases nearby zero and the only component making acceleration left is the heaving of the boat body itself. This is the reason why manufactures suggest placing nearby cog (no need for transducers of so wide dynamics).
Comparison of solid state transducers with transducers with moving parts inside (= gimballed), like all traditional magnetic compasses, fluxgate transducers (VDO ADIS 360, Ritchie DH100, Raymarine Autopilots (Autohelm 4000 in my own boat) etc.) shows that they both have same weakness, acceleration, but for different reasons.
On compassing the main aspect is to maintain horisontal level for measuring magnetic field components.
On lower speeds and latitudes and calm seas traditional compass, gimballed fluxgate compass and solid state compass with electronic levelling installed, in magnetically clean place as close cog as possible, are all good.
When seas go high, latitudes go hig and velocities go high, it means more accelerations which make moving parts swing, and far away off of the cog parts accelerate and decelerate with hig velocities.
Perhaps the 9 degree of freedom- transducers are not good enough for reliable compassing. I suspect – and recommend, that particularly on high latitudes we need a solid state transducer which has 3 orthogonal magnetic field measuring grids, placed at 60 degrees of each other, instead of only one, just to avoid the “zenithing” problem. 3-axis acceleration and 3-axis velocity measurements are a must to maintain virtual level of compass transducer.
I did not answere much, nor were there particular questions addressed to me.
But anyway, heading transducers are so interesting … I will continue tests …
Thank you very much Matthew for this insight.
I am in the process of positioning an H2183 in the boat and this comes at just the right time.
My current plan, using your advice, is in the cabin just under the cabin roof near the mast step. The old compass used to be on the cabin floor by the mast support just inches away from the keel bolts which I am not so excited about. This is for a 45′ GRP sailboat with deck stepped mast.
I have had serious problems with autopilot behavior in rough seas previously and have also replaced the autopilot computer to a Simrad AC12 this winter.
One question: Have you tried a GPS compass in these situations or what performance would you expect?
Hello Henning, and all others.
Answer to You question about GPS compass: Yes, I have tried a GPS Compass, Furuno SC50, and it was good, but still too expensive.
Bringing this back up. I am considering the GH2183 for a Furuno TZ Touch system with no autopilot.
The Furuno heading sensor & GPS is over $1k.. Combining the two sensors and ease of installation in a pilothouse style boat is another plus.
Is the GPS as up to date as some of the other GPS receivers on the market? Is the cold start the only issue with a 12 channel vs the newer GPS antennas?
I have a GH2183 that I use with a Simrad NSE system both for GPS data and heading and with my autopilot for heading. I have a second GPS data output from my Digital Yacht AIT2000 transponder on the NMEA2000 backbone as well. That is a “50 channel” new design unit.
I was curious and wanted to pick which one to use as primary GPS source so I set two data lines side-by-side on different displays. I could not discern any difference in their performance and use the GH2183 for everything.
That may not be fair comparison, Quitsa, because AIS transponders do not output GPS data like a regular GPS sensor does. I don’t know if it’s regulation or habit but usually sentences like individual GPS satellite positions are left out of the data stream, and 1 Hz is fastest position updates you’ll see even if the GPS could do better. The reason is to conserve bandwidth for AIS target info over NMEA 0183, but I’ve yet to see a transponder that took advantage of the much greater bandwidth of NMEA 2000.
I’m not sure if the Airmar GH2183 offered 10 Hz refresh rates when I wrote this entry, but it does now:
http://www.airmartechnology.com/2009/products/marine-product.asp?prodid=183
Also I believe that Airmar’s 3-axis compass, 3-axis rate gyro, and 3-axis accelerometer add up to the same technology that Raymarine is using in its 9-axis Evo heading sensor, though of course the software that makes sense of all those sensors is likely different.
Ben, I think the 10Hz update rate refers to the compass part of the GH2183, not the GPS. In the “Borchure/Specification” link on that page it says “GPS-Fix Update Rate: 1 x per second”.
I have been using an H2183 compass for 3 seasons now and am satisfied with its performance, especially when compared to my previous Simrad sensor that came with my old “Robertson” autopilot. On this season’s trip from Hamburg to (so far) Portugal, we have often been bouncing around good in Atlantic swell and low wind situations and the compass output is beautiful. My current Simrad AC12 autpilot computer performs much better with this compass than did the Robertson with the Simrad compass.
Re the GPS I am not so sure about 10Hz refresh. My GS15 Simrad GPS has 5Hz update and this causes large fluctuations in COG and SOG in the big swell that we now live in. It causes the blue predictor line in CE to jump around wildly, much reducing its utility (30 degrees either side and 2 times changes in length – this is no longer very useful in assessing a crossing situation). I did not have this problem with my older GPSes.
I have asked Rose Point for a settable damping value and have seen that the RTM 3.0 release for the Simrad NSS advertises a new feature “Configurable filtering for GPS COG and SOG to smooth fluctuations in received data from sensors”.
Bottom line seems to be that if you have higher than 1Hz update rate, you need some form of damping?
Not a rhetorical question: does the damping completely offset the effect of a higher update rate or is there still some benefit in it?
And on Airmar sensors in general:
I am satisfied with the performance of the PB200 in these swelly low-wind situation we have had so much here. TWD, TWS and AWA and AWS change very little if the mast top is swaying around wildly and it can’t be just from damping as if I change course, AWA and TWD will change quickly with the course change. At the moment, we are at anchor at Punte de Sagres on the very corner of Portugal. It’s a rolly anchorage and we have to leave soon. The PB200 reports a true wind between 1 and 3 knots and the boat is rolling through 20 to 30 degrees (as reported by the roll values output by the H2183). The Windex is flapping from side to side but the PB200 reports changes of AWA and TWD of no more than 30 degrees.
The CS4500 ultrasonic speed sensor that I also use is OK in that it was never blocked with barnacles, which is the main reason I bought it. But to say that I get prefect performance from it would be an overstatement. I would say it’s on par with a paddle wheel but it appears to have a problem with a tidal flow coming from either side, not directly ahead or astern. In these situations, I have several times seen it under-reading massively so that it was useless, like SOG of 8 knots and log output of 2.5 knots. I first thought it was broken but it has always recovered after a while, possibly when we were no longer going cross-tide.
I would love a small box or software feature that allows to calibrate log output (Airmar or any other sensor) while using the NMEA2000 roll values available from such sensors as the H2183 so that calibrating can be done for each bow you’re sailing on because my boat really needs it.
Hi there, does anyone have experience with KVH GyroTrack compass sytem ?
Hallo Henning,
It seems that a lot of manufacturers do not use the doppler shift measurements anymore to get precise SOG/COG data. Even my old Garmin 45 handheld GPS used that method to have a bang-on COG/SOG-result. The GPS unit I am using now for racing has a µblox-6 receiver chipset, an update rate of up to 5Hz and costs 43 Euro at Amazon.
http://www.navilock.de/produkte/F_785_u-blox-6_61840/merkmale.html
It is a USB device and therefore directly connected to my Laptop. Using the configuration software from the chipset manufacturer you can set the filter dynamics to “sea” as opposite to “air”, “automotive” or “airborne”
http://www.u-blox.com/de/evaluation-tools-a-software/u-center/u-center.html
A very good and reasonable priced GPS receiver is the Garmin GPS 19x, which comes either in a NMEA0183 or NMEA2000 version. This even gives out a 10Hz reading and the Kalman Filters for the dynamic characteristics can also be configured using the Garmin configuration tool.
All the modern chipsets are high sensitive ones, so I tend to install them rather below decks and at the center of motion of the vessel – provided it is a GRP hull. The installation on the pushpit is just too shaky as the modern GPSes measure every inch of motion.
Have fun,
Cheers Chriggel
Old thread but still interesting for me:-). I’m trying to increase perfomance on my Raymarine 400G autopilot. It is steering quite good with a rate gyro, but I want it as good as it get.
I was recommended a solid state compass on another forum. My autopilot is NMEA0183 and the rest Furuno NN3D NMEA2000.
The need for both 0183/2000 made me look at the Airmar H2183.
Questions:
Have anyone tested this compass with a Raymarine pilot? If so, is there a significant improvment compared to the fluxgate/rate gyro?
I understand from reading Dan C. post that the fluxgate should be disconnected from the
course computer in order to force it to read on the NMEA port.
Will the autopilot be able to read rge rate data from the Airmar? Or is the it “just” getting a better heading?
Oceansailor
I had a Raymarine autopilot that I used the Airmar compass with. This model had both NMEA 2000 and 0183 interfaces. I used the NMEA 2000 interface. It steered very well. I’ve since replaced the pilot with a new Evolution pilot which I sense does steer even better. While the Airmar sensors are still installed,and connected, the pilot uses the Raymarine evolution heading sensor. Since the Raymarine pilot gyro is separate from the fluxgate, and is essentially hardwired in, I assume the rate info from the Airmar compass is not used. You can check to see which 0183 input sentences your pilot understands. I recall that the number of NMEA 2000 sentences my old Raymarine pilot understood was larger than the number of NMEA 0183 sentences.
So the answer is that performance probably “depends” on the autopilot you have. Raymarine maintains documentation for their products, so you can look up what NMEA input data is used.
While I have not logged Raymarine Evolution heading data vs Airmar heading data for detailed analysis, I have the impression that they are comparable. Clearly this is only “hearsay” without the analysis.
Cheers
Don
Aboard Cats Meow
Ponce, Puerto Rico
Don,
What you write make a lot of sense. I would think the perfomace are about the same when it comes to the Evolution and the Airmar compass. The corse computer I have is from 2003 (RM 400G). It is a good autopilot that still performs better than some other later designs from other manufacturer that I have been testing.
I would expect that the EV-400Sail would steer better as I assume that Raymarine have had developed and fine tuned the algorithm.
Thanks for taking the time to answer. Happy cruising.
Oceansailor, when I upgraded my sailboat from the Raymarine S100G / H2183 combination to the Raymarine Evolution, I did not notice a difference in autopilot performance (both were great), but the p70 display has features the older display did not.
When connecting the H2183 I connected the NMEA2000 port to my main boat network, and the H2183 NMEA0183 output (2 wires) straight to the autopilot input (so that a failure of another 0183 device wouldn’t risk disabling the autopilot heading). I removed the 0183 output from the autopilot to the MFD (fast heading output), as my MFD got the heading info from the H2183 via NMEA2000.
Hi Dan,
I’m not sure what S100G means? What course computer is that? Did it have a rate sensor?
Did you upgrade from the “type 100” course computer (black aluminium case) to the Evolution series?
The 100 series must be app. 20-25 years old. It sounds really strange if 20 years of product development have not resulted in better perfomance?
Was there any significant differance in downwind sailing in higher winds and seas, (30 knots, 10 foot seas) after upgrading to the H2183 compass?
Thanks Dan,
Yourcomments are very much appreciated.
I’m not sure what course computer S100G means? Can not find that course computer.
There is a “type 100” course computer manufactured 20+ years ago. Is that the one you upgraded from?
Did you expearance any significant improvments in high wind and seas ( +25 knots and 10 foot seas) after the upgrade to H2183?
Sorry for the double posting!
Oceansailor – The correct model number was a Raymarine S1 Autopilot, when it was upgraded with rate gyro it became the S1G Autopilot.
The rate gyro made a tremendous difference in following seas. Ten foot seas and 30 knot winds were no problem, even before I used an H2183
Initially the H2183 was not connected to the autopilot, so I got a sense how much the flux gate directed autopilot didn’t accurately go in the direction i wanted. It was years ago, so I don’t remember the difference.
I can point you to the unexpected benefits of using the H2183 before I connected it to the autopilot. I wrote about here on Panbo:
https://panbo.com/archives/2009/11/airmar_h2183_improves_situational_awareness_feature_on_raymarine.html
When I did move over to the Evolution product (I wanted to retire all my seatalk gear for NMEA2000), I can’t say it did any better than the S1G + H2183 combination as it was already very good.
Dan
Raymarine Evolution: Updating from a fluxgate compass is a bigger deal than it might sound. This 2009 Panbo entry that highlights unexpected positive benefits of the H2183 solid state compass would be equally applicable to new Raymarine Evolution.
https://panbo.com/archives/2009/11/airmar_h2183_improves_situational_awareness_feature_on_raymarine.html