
Smoothing the seas, pitch and roll control systems compared

There are numerous systems that control a boats pitch and roll. These systems use a variety of in water devices to control the flow of water and alter how a boat runs through the water. In recent years quite a few systems have been introduced and updated including Lenco Pro Control, Seakeeper Ride, and ZipWake. With numerous options and different technologies, how do you decide which system is right for your boat? I put together a fleet of test boats to try and answer these questions and compare the systems performance. Read on to see the results and determine the best fit for your boat.
Allow me to state the obvious, bolting an adjustable device to the stern of your boat to deflect water and control it’s running trim isn’t new. In fact, there’s a whole category of such devices called trim tabs. Charles Bennett created the first adjustable trim tab in 1959, some 66 years ago. For about 40 years, it seemed trim tabs enjoyed small improvements but remained steady. But, in 2002 Niclas Olofsson co-founded Humphree and introduced interceptors and a 13 years later he founded ZipWake and unveiled a system that automatically adjusted pitch and roll as the boat moves through the water. Today, there are numerous systems that control pitch and roll. Broadly, I’ve described them as pitch and roll control devices or PARCD. This spring, I spent quite a few days on the water seeking rough conditions and comparing the performance of three PARCD systems.
Although I hope to be able to update my testing results as new products become available — and one already has with the new ZipWake Pro — the three systems I tested this time around are Lenco Pro Control, Seakeeper Ride, and ZipWake Series E. For my testing I had the opportunity to compare all three systems head-to-head as well as having the benefit of having each of these three systems installed on my test boat at one time. Well, almost. I had ZipWake Series S, not E on my Cobia 220 prior to the installation of Seakeeper Ride on that boat. My current Edgewater 280CX has Lenco Pro Control installed.
The systems
| Retail Price | Full Stroke Length | Deployment Rate | Time to Full Stroke | Roll Authority1 | Pitch Authority1 | |
| Lenco Pro Control Auto | $2,675 | 2.25 inches | 0.7 inches per second | 3.2 seconds | 9.9 degrees | 1.3 degrees |
| Seakeeper Ride 450 | $4,500 | 1 inch | 11.81 inches per second | 0.08 seconds | 10.9 degrees | 2.4 degrees |
| ZipWake Series E 400 | $6,430 | 2.4 inches | 0.8 inches per second | 1.6 seconds | 15.5 degrees | 3.5 degrees |
| ZipWake Series S 4502 | $3,500 | 1.2 inches | 1.5 inches per second | 1.5 seconds | Not Tested | Not Tested |
Lenco Pro Control Auto

Lenco Pro Control Auto is the newest and least expensive of the three systems compared. The system, with tabs, starts at $2,675. If the boat is already outfitted with tabs, the system starts as low as $2,480. Pro Control utilizes traditional trim tabs with more robust CANBus controlled actuators. As you can see in the table above, Pro Control also has the longest full stroke time by a factor of two.

Unlike the other systems in the test, there is a big variable in system performance based on the physical tab used. Seakeeper Ride and ZipWake both use in water devices available in multiple widths, but that’s the only variable. Pro Control can use tabs of varying geometry, thickness, and materials. For example, Panboat uses an 18.5-inch wide by 13-inch tab, Seakeeper fit a 12-inch by 12-inch tab on their boat — per Lenco’s sizing guide — and Lenco’s Cobia 220 came with interesting wide and shallow tabs pictured above. Lenco calls them hybrid tabs. These 18-inch wide by 4-inch deep tabs behave more similarly to the interceptors and rotary controllers of ZipWake and Ride.
Although the use of traditional tabs may limit some of the absolute speed stats for the system, it can also ease installation in retrofit applications. If your boat already has trim tabs, chances are very good you can reuse them. If your boat has pockets for tabs and you’re switching to either ZipWake or Ride, you will likely need to fill those pockets. That’s not a huge deal, but it comes at a cost. So, if budget is a major factor Pro Control may enjoy an advantage.
Seakeeper Ride

Seakeeper Ride uses neither traditional trim tabs nor vertical interceptors. Instead the system uses rotary controllers that deploy a water deflecting controller into the flow of water passing under the hull. The effect is similar to an interceptor.
Everything about Seakeeper Ride is about delivering maximum performance. Ride is headquarter in Fort Myers, just up the street from my house. I see their test boats on the water frequently so I have an idea of how much time they spend testing — it’s a lot! Their focus on performance shows in the system’s specs as well. Ride’s full stroke deployment is forty times faster than Pro Control.
Seakeeper’s commitment to speed isn’t limited just to the physical movement of the controllers. They tout 1,000 measurements and up to 100 adjustments per second. At times, the controllers move so fast I’m skeptical they’re actually effective. But, we will assess that when we look at the performance numbers.

Ride’s installation requires gluing the in water portion of the system to the hull. Based on my experience installing and watching the installation of all three systems, I expect Ride’s installations will typically be the most time consuming and expensive. The Sportsman 262 has two Seakeeper Ride 450 millimeter (17.7 inch) controllers installed with one inch of extension per controller. On the Sportsman, the controllers are installed in pockets which resolve the issue of the controller protruding pretty far aft off the transom.
ZipWake Series E

ZipWake’s Series E and Series S vertical interceptors helped introduce dynamic pitch and roll control systems. They’ve also been out for a few years and ZipWake is in the process of rolling out higher speed, updated versions of their system called ZipWake Pro.
The Series E system Seakeeper installed on their Sportsman 262 is the higher end system with double the deployment distance of Series S. That increased deployment distance shows in the roll and pitch authority of the system. Those measurements indicate the maximum roll and pitch movement the systems can impart on the boat. ZipWake’s maximum influence is noticeably larger than either Pro Control or Ride.

ZipWake’s interceptors install onto the flat surface of a transom. If there aren’t pockets on the transom, the installation is pretty straightforward. Typically, existing pockets need to be filled before the interceptors can be installed on boats with pockets.
The Series E 400 system utilizes two 400 millimeter (just shy of 16 inches) wide interceptors paired with ZipWake’s advanced controller. At $6,430, the Series E ZipWake system is just shy of double the cost of a Series S system at $3,500. The more expensive system provides double the deployment distance and speed and a more advanced controller. I think Seakeeper selected Series E to try and ensure the system had the best possible performance. But, based on my experience with Series S on my Cobia 220CC, I also think the system may be overkill and result in unfavorable price comparisons. So, as we look at price comparisons, just remember there is a cheaper option available that will likely perform nearly as well.
The tests
Testing PARCD systems taught me a tough lessen: testing these systems isn’t easy! In varying degrees, all three options require time consuming and potentially expensive installation — and in some cases hull modifications. To end up with useful comparisons, you really need multiple identical boats each equipped with one of the test systems. This comparison is based on the systems available at the time of my testing and based upon fleet availability I was able to cobble together a test fleet from both Seakeeper and Lenco as well as my own boats. I did the testing across several different days and with multiple types of boats.
Testing with Seakeeper’s fleet



The first testing was performed using boats provided by Seakeeper. They equipped three Sportsman 262s with Ride, Pro Control, and ZipWake Series E. We ended up testing over multiple days with these three boats primarily because our first day of testing was (of course) abnormally calm. Naturally when testing systems that shine in rough water, we got nothing but calm seas. Our second day out delivered the sort of short chop and generally snotty conditions we were after so we got good data.
During my days on the water with Seakeeper’s fleet, we had some issues with the Lenco Pro Control throwing an error and reverting to manual mode. I worked with Lenco to try and resolve the issue but ultimately we have no results for some tests because the system reverted to manual mode before completion of the run. You will see those results reflected in some of the results below.
Testing with Cobia 220CCs

Seakeeper completed the installs of the competitive systems on the Sportsman 262s. Fortunately, I still had my Cobia 220CC with the Ride system Seakeeper installed. In an effort to ensure we got good comparison data, Lenco installed Pro Control on a Cobia 220CC. Thus, I was able to hit the water with the old Panbo(at) Cobia 220CC equipped with Seakeeper Ride installed by Seakeeper and a matching 220CC equipped with Pro Control installed by Lenco.
Results
I pride myself on my impartiality. In my testing, I work hard to make sure they all products have an equal chance. I am confident each product in this evaluation was given a very fair shake. That said, the performance results, particularly in roll and pitch stabilization, weren’t close. Seakeeper Ride outperformed the other two systems in every condition, measurement, and onboard experience. The results section runs the risk of becoming an ad for Seakeeper Ride. If you’re after absolute performance and money is not a factor, Ride delivers. However, both Pro Control and ZipWake offer meaningful launch and list control benefits while also improving both pitch and roll behavior.
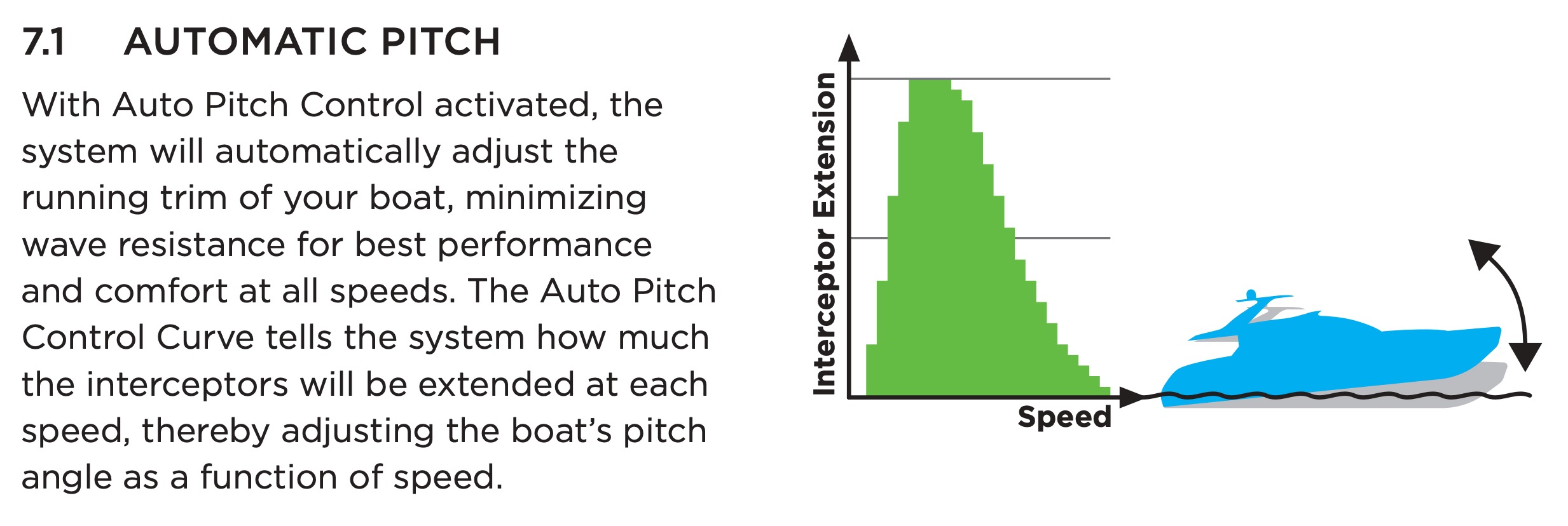
Although all three systems use in water devices to control pitch and roll, they all do it differently and with widely varying ambitions. ZipWake uses an auto pitch control curve to determine target blade extension based on vessel speed. The sample curve from the manual above shows significant extension as the boat begins to climb on plane followed by backing off as the boat gets more fully on plane.
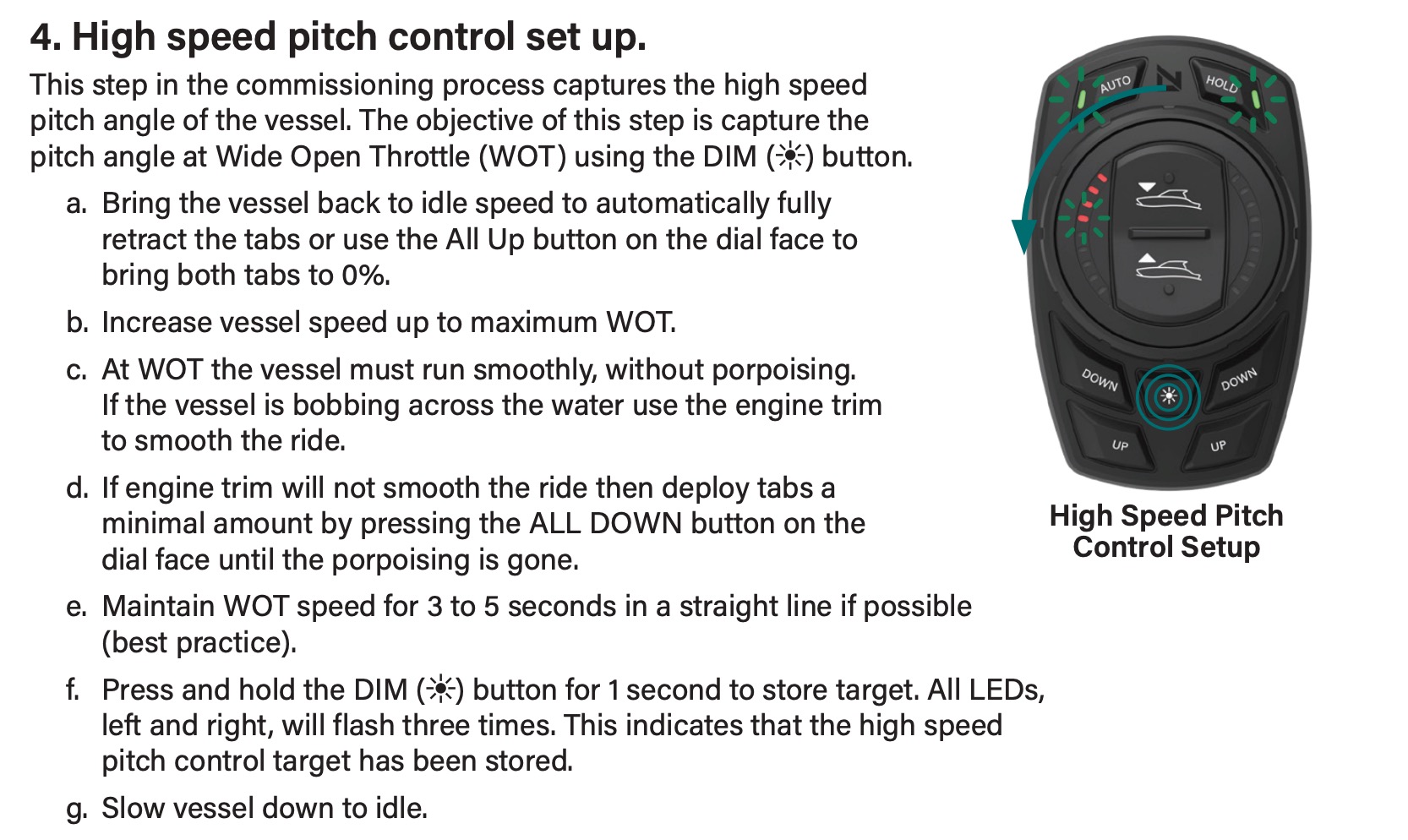
Lenco Pro Control uses pitch targets based on sea trial results. During commissioning, the system is calibrated for target pitch based on its angle as it climbs on plane followed by the running angle at wide open throttle. In operation, the system deploys the tabs to achieve pitch targets based on the values measured during commissioning.
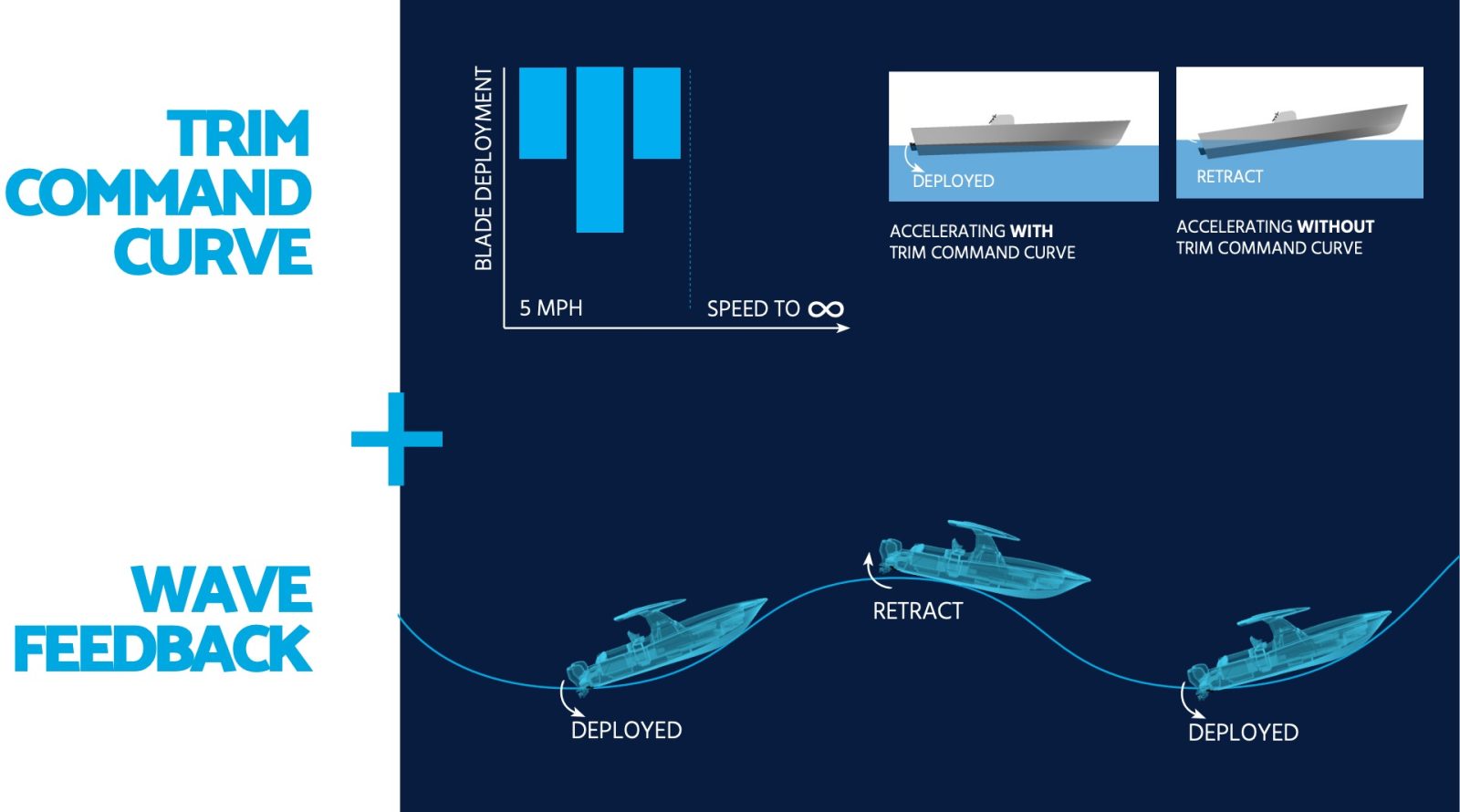
Seakeeper Ride takes a different approach. As the boat is launched, Ride uses a predefined curve similar to ZipWake. However, Ride also responds to observed conditions by reacting to pitch acceleration. If pitch is increasing, the system works to drop the bow, if it’s decreasing, it works to lift the bow. Once the boat is fully on plane, the system no longer uses a predefined deployment target and simply responds to pitch acceleration. For roll control, Seakeeper targets 0 degrees and works to counteract any roll.
By the numbers
I’ve been testing pitch and roll control systems for quite a few years now. I often concentrate on features like launch control and list correction. During testing with Seakeeper, I realized they barely look at these features, instead focusing on pitch and roll control in dynamic conditions. Seakeeper’s CEO, Andrew Semprevivo explained to me that launch control and list correction are easy and were dealt with very early on in product development. Seakeeper spent the lion’s share of their product development and testing on roll and pitch stabilization. Although I understand Semprevivo’s point about the ease of those tasks, I don’t want to sell launch and list control short. Those are important workload reduction features for operators and often the easiest to observe and understand.
Launch and list control
Launch control is an outlier. Ride is not clearly the best performing system and all three systems are competitive. I look at launch control in two dimensions, maximum bow-up attitude experiences and time to reach an on-plane attitude. ZipWake outperforms Pro Control and Ride in maximum bow-up attitude and Ride achieves the fastest on-plane attitude. I suspect that ZipWake’s additional authority compared to the other two systems explains ZipWake’s ability to hold a lower maximum pitch. One comparison not captured in this chart is the boat’s behavior at launch with none of the three systems assistance. I did have the benefit of such a launch and can speak to the value of any of the three systems to improve launch performance.
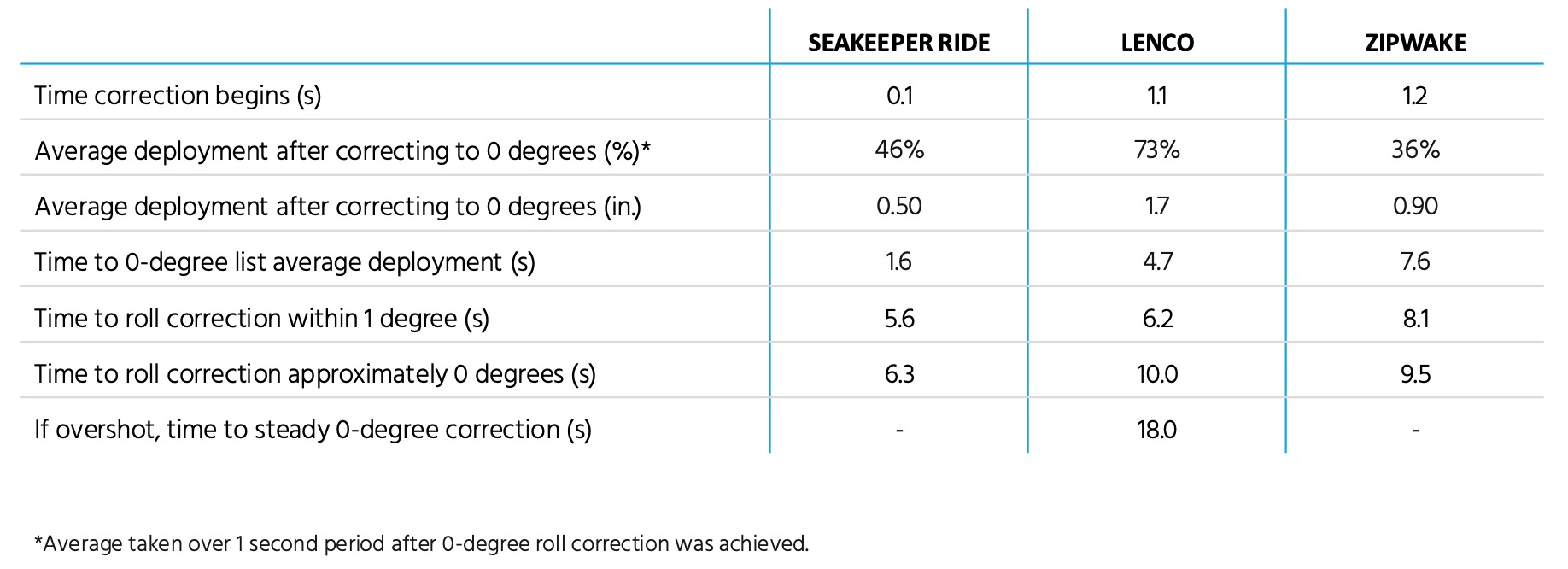
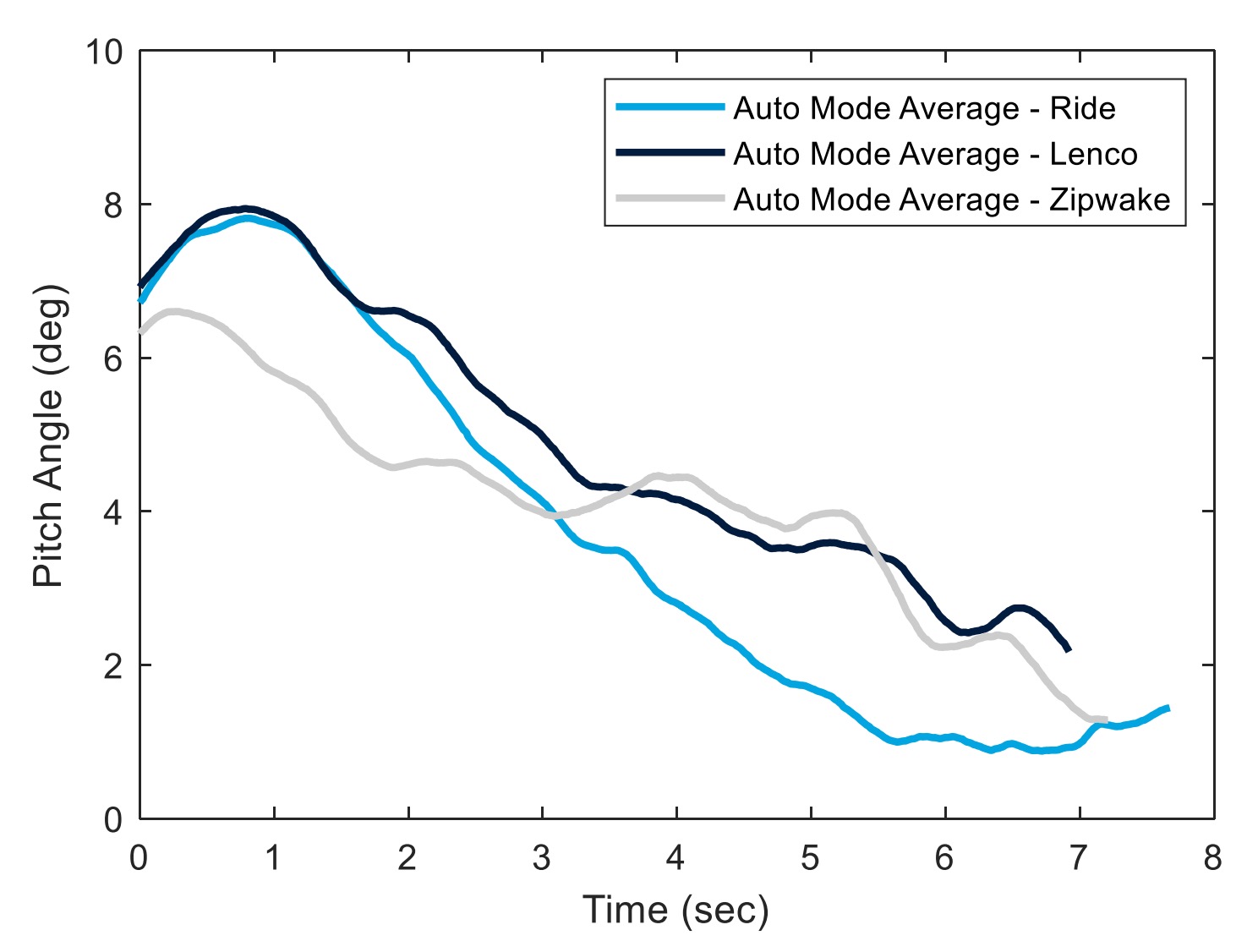
Much of my experience with all three systems has been on single engine outboard powered Cobia 220CCs. The 220 has a pretty pronounced list from prop torque. Early on in my time with Ride on the 220, there was a delay once the boat was on plane before Ride corrected for list. That delay has been eliminated, but while it was there, it served to clearly show the effect of the system in removing list. As the data above shows, all three systems effectively control list. Pro Control is a little bit slower than ZipWake and Ride to zero degrees, but gets within one degree in similar time to Ride and faster than ZipWake. Overall, Ride has a small but not particularly noticeable advantage.
Pitch and roll stabilization
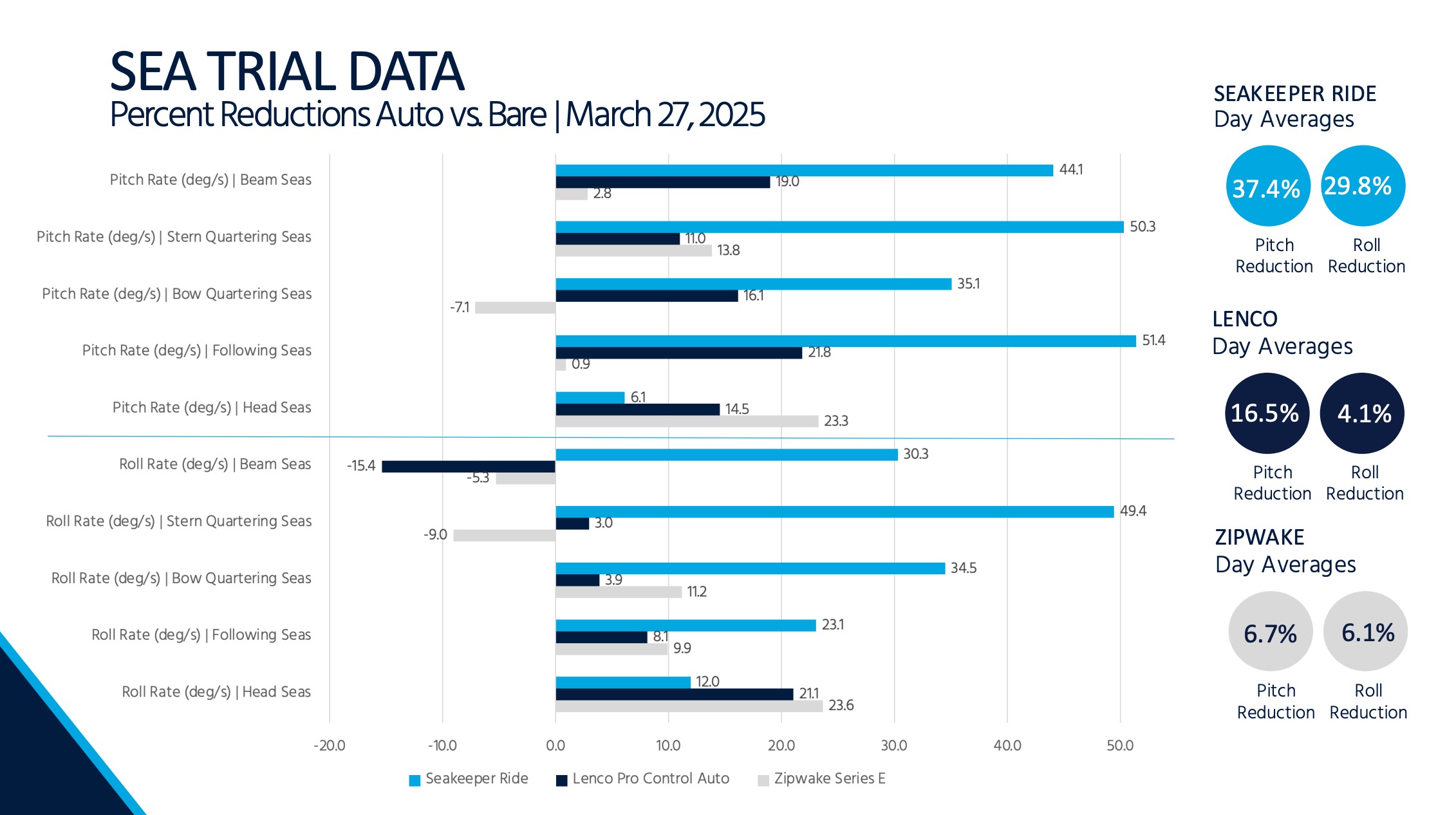
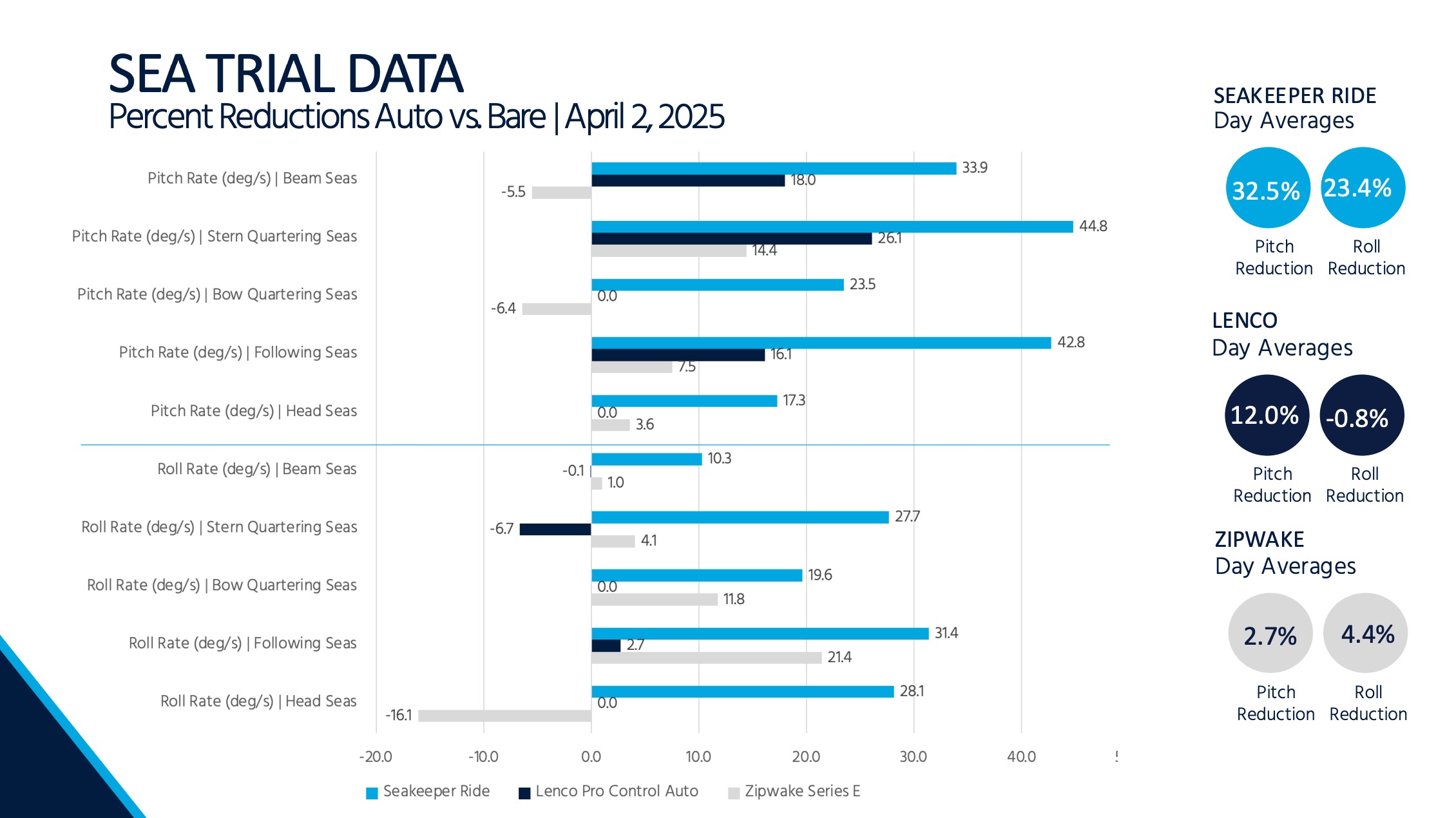
Seakeeper Ride stabilizes both pitch and roll and Seakeeper markets the system based on its performance in both dimensions.. ZipWake is clear that current Series E and S models utilize an auto pitch curve for pitch control and automatically stabilizes roll. ZipWake Pro will automatically control both pitch and roll. It is less clear if Lenco is claiming full stabilization for the system in both dimensions. Some of the marketing material seems to concentrate more on list control than roll stabilization. However, the system is marketed with a tagline of “Stability, Evolved.”
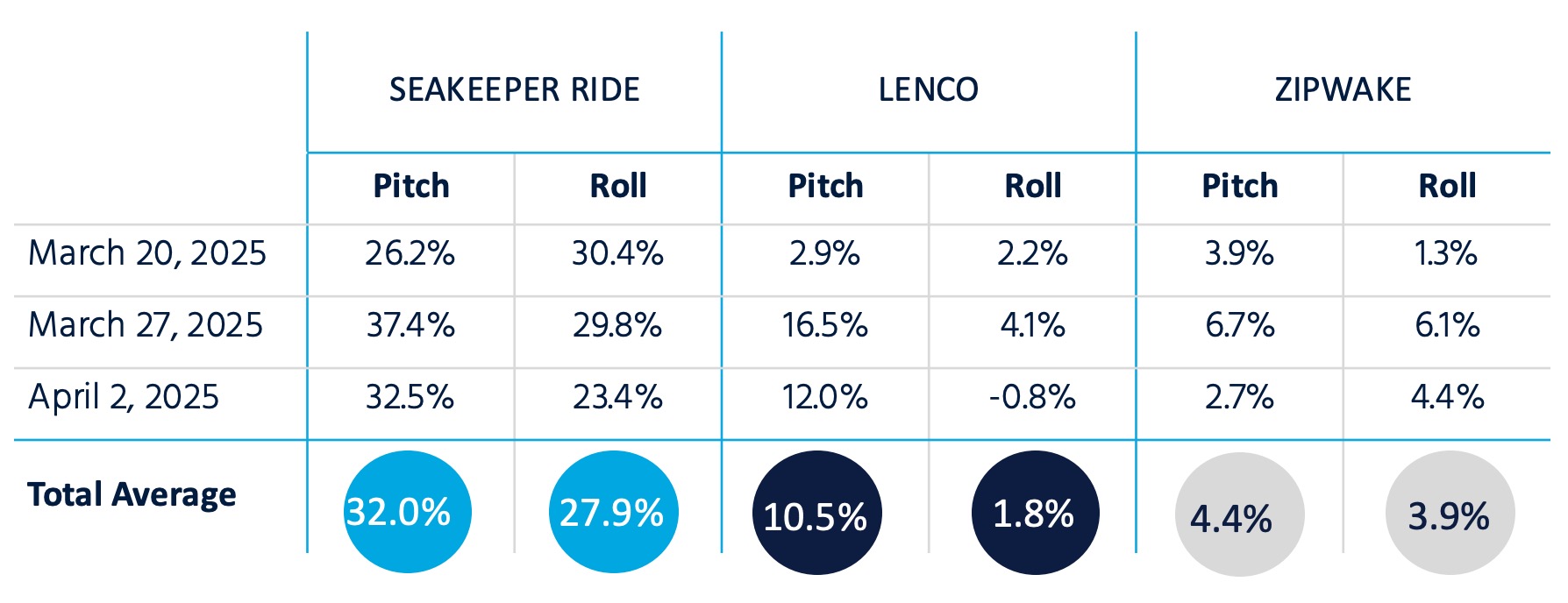
The two charts above show the data Seakeeper collected over two days of on the water testing. Conditions on March 27 were significantly calmer with seas barely over a half a foot on a three second period. April 2nd brought better test conditions with 1.8 foot sees at three seconds. Pro Control data is missing from some April 2nd tests because the system reverted to manual mode in head and bow quartering seas during the rougher conditions. Despite not producing any data for some tests, Pro Control’s test averages placed it in second place overall.
| Seakeeper Ride | Lenco Pro Control | |||||
| Test | Auto Roll Degrees – Standard Deviation | Manual Roll Degrees – Standard Deviation | Percent Roll Improvement | Auto Roll Degrees – Standard Deviation | Manual Roll Degrees – Standard Deviation | Percent Roll Improvement |
| 1 | 1.718 | 2.644 | 54% | 1.727 | 1.544 | -11% |
| 2 | 0.781 | 1.132 | 45% | 2.595 | 2.902 | 12% |
| 3 | 1.769 | 1.919 | 8% | 2.056 | 2.528 | 23% |
| Average improvement | 36% | Average improvement | 8% | |||
Lenco’s data collection with the two Cobia 220CCs was limited by only having one set of data collection equipment. As a result, the two datasets shown above were collected in the morning for the Pro Control boat and in the afternoon for the Ride boat. Unfortunately, conditions also calmed between the morning and afternoon runs. However, even with these variations, I see a continuation of the pattern from other tests as well as data that matched what the seat of my pants told me.
Onboard comfort
All three systems have the ability to significantly change how the boat moves through the water. Ideally, that ability is used to improve the ride, comfort, and control of the boat. But, there is also an opportunity to introduce adjustments at inopportune times or in ways that make the ride feel unnatural or even scary. My own judgement, forged both from the days on the water and having had versions of each of these systems installed on my boats, is that Ride delivers the biggest improvement with the fewest unintended consequences. Lenco Pro Control closely follows Ride with regards to natural handling of the boat, but does induce significant yaw. ZipWake is very steady — and I believe conservative — in the adjustments it makes. However, I also feel that ZipWake flattens out turns in a manner I find uncomfortable.
Judging the work of each of these systems can be challenging. I don’t think there is a way to test each system in the same water. Instead, I rely on exposure to lots of different conditions and comparing what I expect the impact to feel like versus the reality. I’m confident that in the right conditions, each of these systems shine. However, Ride sets itself apart from the other systems by creating a real mismatch between expectation and reality. On a ride equipped boat you will frequently look forward, see a wave coming and expect a large impact only for the impact to never arrive. Ride can’t mitigate all of the impact of sea conditions, but it can make the boat ride like a larger vessel.
Ride is the only one of the three systems actively working to mitigate yaw introduced by asymmetric deployment of the in water portion of the systems. Every time the tabs, interceptors, or controllers deploy, they create drag. If they don’t move evenly, that drag is uneven and results in the boat turning from uneven drag. Asymmetric deployment is required to fight roll, so inherently controlling roll creates yaw. Ride works to reduce the uneven drag and resulting yaw by measuring it and fluttering the controllers or even quickly deploying the opposite controller to counteract yaw. I noticed yaw mitigation primarily through reduced effort in keeping the boat headed straight. Over the course of the day, that reduced effort shows up as reduced fatigue. Additionally, mitigating yaw helps avoid potential interference with other onboard systems like auto pilots.
Final thoughts
Simply put, Ride is the cream of the currently available crop of pitch and roll control systems. However, that performance comes at a cost premium and the market doesn’t sit still. ZipWake’s Pro is right around the corner and I’m anxious to see how ZipWake Pro performs with updated control logic and five times the deployment speed. Looking at the systems available today, Ride sits at the top of the heap but also comes towards the top of the cost curve and potentially requires the most in depth (and expensive) installation. Lenco Pro Control offers the lowest cost of entry and, depending on the current hull configuration, the least expensive and fastest installation.
The right option for your boat is likely dependent on your boating habits. If you’re heading offshore, damn the conditions, Ride is going to deliver the biggest improvement. If you’re more of a fair weather boater looking for a system to make your coastal cruising more comfortable, both Pro Control and ZipWake have a lot to offer.
P.S.
I mentioned that Lenco Pro Control didn’t complete some of the tests, I want to provide an update on those issues. During testing it became clear that Pro Control had an issue when the sea states got larger and the impacts more direct, like in head seas. I was able to recreate the same issue on my Edgewater 280CX. In response, Lenco came out and moved the IMU on my Edgewater to the inside of the transom. That solved the problem for a while, but now I’m having troubles with the system reverting to manual mode from engine trim operations. It seems the engine trim motor generates a lot of EMI that is troublig the IMU. Lenco is working through the issue and hopes to have a fix soon.








It’s nice that Zipwake is offering PRO upgrade kit. not cheap, but still nice they give the option, instead of full replacement.
however need to see some results of the PRO to justify the spend.
we are installing our first set of pros shortly, i have played around with the running demo systems at the recent Sydney boat show. im impressed with how much faster they are compared to S series, and if the software has kept up it could be an interesting compeditor to seakeeper.. down here the Pro kit is about $2500 cheaper than seakeeper ride.
There are more systems that were not included such as Hydrotab interceptors .
There are numerous systems not compared. The hurdles of sourcing a boat, installing each system, etc limited how many systems I could compare on the water.
-Ben S
I installed two hydratab systems a few years ago. I’m pretty sure I was the only one to install them from our regional supplier. I had ……aallllloooootttttttt of issues with one set. Second set…not so much but quiet expensive with little to no support in my region.
strange
i have installed hundreds in Europe with zero issues and its is by far the most reliable and cheap system in the article
Too bad, I just went to their website to try and learn more. I can see the basic product pages but quite a few of the links are bad. The link to the SR series brochure gives an error that the document is unpublished, the learn about our technology link doesn’t work, and the product catalog is from 2019. I’ll reach out and try to get more info. I haven’t come across them in the U.S.
I did some digging in the downloads section of their website and did find a few brochures and manuals. None of them list the deployment speed or other operational details. Do you have any of that info?
-Ben S.
strange
i have installed hundreds in my region since 2010 with no issues ,it is by far the best value system from the options in the article .
One issue about which I am curious is the impact of these systems on autopilot performance. I have noticed over the years that the use of trim tabs can impart steering forces that can change how the boat responds to the rudder and confuse the autopilot and cause it to initiate incorrect course corrections. With one of these systems making hundreds of changes in trim per minute, I wonder if the autopilot will somehow ignore them or just get even more off track
Did you try running on autopilot to see what happens?
Fred,
If my understanding of the many forces involved is accurate, the steering forces you describe is yaw. Indeed, these systems can adversely impact the autopilot’s ability to accurately steer the boat. In my mind, I visualize this happening because if a stern mounted control device deploys or retracts, it is adding or reducing drag. That change in drag also has an impact on yaw. Essentially, the boat wants to rotate more or less about the stern based on asymmetrical deployment of port and starboard control devices. I think the real trouble comes when those corrections are made by an automatic system not coordinated with the autopilot. Imagine the port device deploys significantly to correct a roll, after a few seconds, the roll abates and the device retracts. As that happens, the port tab “grabs” the water and causes the boat to yaw to port. The autopilot sees the heading change to port and dials in starboard rudder. But, the autopilot is almost certainly slower than the pitch and roll control system. So, by the time it puts in that starboard correction, it’s not needed. In fact, there’s every chance the boat is now rolling the other way and the autopilot’s correction will only exacerbate this. The end result is a fishtailing effect and possibly even the autopilot disengaging with an error because it believes its inputs are ineffective.
Seakeeper says that their yaw mitigation minimizes the effect. In my testing on the water, I didn’t do any formal testing but anecdotally I definitely noticed better performance from Ride.
-Ben S.
Yes that is exactly the issue. The very rapid response rate of the Seakeeper Ride system could possibly be so quick to manage yaw that the autopilot controller would not perceive and respond to the minor course changes the way it does when the yaw is introduced by trim tabs that are being manually adjusted intermittently.
Interesting issue worth a test if you are on a boat with Seakeeper Ride that also has autopilot. My boat would probably have been a good candidate for one of these systems. She is a very light cold-molded express sportfish and consequently quite sensitive to trim. Even having a 200 lb crew member move from the port to starboard helm bench necessitates some adjustment of the trim tabs. That will also cause the autopilot to steer less accurately and generate greater cross track error steering to a waypoint if I don’t adjust the trim tabs. Too late now, it would have been more feasible eight years ago when I had her built.
It’s never too late Fred, it’s only money!
-Ben S.
And the best kind from your perspective — someone else’s money! But I am sure the builder could modify the trim tab recesses and create a nice recessed mount for the Seakeeper actuators…. fortunately I just had my boat hauled yesterday for winter and it’s too late to organize winter in Beaufort, NC.
You are correct, someone else’s money is indeed the best kind to spend. All kidding aside, a boat that is sensitive to trim is probably a very good candidate for Ride. Seakeeper has, to my understanding, developed some clever ways of filling pockets and mounting to the transom, though that may or may not work with your configuration. I imagine it would be a worthwhile, though several boat bucks, upgrade. Perhaps some day down the line…
-Ben S.
Was the Lightning system by Humphree ever considered for the test? From what I’ve understood, they pioneered the active trim and stabilisation market. Only been out once with a CC with ”the lightning” installed, but the performance was jaw dropping! Impressive how you can change the dynamics of a boat with the push of a button.
Chris,
Yes, I tried to get in touch with Humphree to include them in the comparison but wasn’t successful connecting with anyone there. I did some digging with colleagues and found my experience isn’t unique. Unfortunately, coverage without help from the manufacturer is very difficult.
-Ben S.
Thank you Ben! For providing full in-depth review on all three of the systems. Have been searching in comparison for all three of these and this is the only one I found so far with extensive details
Lovely article
My question
You are the only one to show curves of bow rise, squat of the boat
But, Where does the bow “ go on plane “ or “ over the hump”
My assumption, would be just free the bow rise reaches maximum ?
Hi Jeff,
I’m not sure I fully understand your question, but I’ll do my best to answer what I think you’re asking. If I’m off the mark, just let me know. Planing boats have a natural running angle on Plane. While getting on plane, the bow tends to rise some — how much varies by hull design, loading, motor angle, and more — and then settle flatter once on plane. Typically, controlling the running angle once on plane requires very little correction while controlling bow rise getting on plane requires significantly more correction via greater deployment of the in water devices.
-Ben S.
Also,
If not using tabs , interceptors , how would the bow rise & planing angles and time change ?
Assumption: motors trimmed ll the way down