
The XTE issue, autopilot behavior & electronics dollars

All those bodies boating in the rain represent a lot of money spent over a problem never fully “solved”…which may be why I let the story gather dust for many months. Two are representatives from Raymarine who drove several hours to investigate why the boat’s new ST7002 control head and SPX30 course computer autopilot system was still making the owner very unhappy. The other two are employees of Wayfarer Marine, which had already put about ninety hours — some of it uncharged — into what had seemed at first to be a simple replacement needed because the boat’s original Raymarine 300 course computer (manual PDF still available) stopped turning in one direction. Anyone with an autopilot, or concerns about the cost of marine electronics, might want to know more about what happened…
I won’t get into all the problems Wayfarer had getting the new AP to work with the boat’s existing electronics, and then with the Garmin 4212 that was chosen to replace the Northstar 952W in hopes that the new AP would get waypoint info from it. Suffice it to say that NMEA2000, or SeaTalkNG as Ray calls it, didn’t work as hoped; a variety of alternate data schemes, mostly involving NMEA 0183, were tried; and Wayfarer’s synopsis of the whole deal includes the sad if perhaps redundant line, “Raymarine and Garmin recommendations were not helpful and did not work.”
But by the time I got invited to go along on that rainy test cruise, the ST7002 was taking go-to information from the Garmin just fine. The final — and perhaps knottiest — problem was that the pilot seemed to behave badly when it was steering to a waypoint but told to dodge lobster pots or similar and then to resume course. The owner described the results as erratic and downright dangerous, but the guys from Raymarine made a pretty good case that it was acting as designed. However the design had apparently changed significantly from the 300 course computer to the SPX30. When the owner had asked the old 300 to resume course, it simply started steering toward the waypoint again, but the SPX30 thinks that resuming course means getting back onto the original track, and it’s willing to make a fairly substantial turn away from the waypoint to accomplish that.

It should be noted that this doesn’t happen if you are just steering to a heading and not to a waypoint, but I admire this owner for building routes and using them. If his new autopilot wasn’t driving all over the place after the regular dodging required around here, he’d have more time both to keep his head out of the boat and to enjoy himself. And it should also be noted that Raymarine displays have a fairly-easy-to-get-at function called “Reset XTE” which would make the SPX30 return to a waypoint course just like the 300 used to. Plus there’s little doubt that some of his unhappiness is due to all the time and money spent replacing the original course computer, which, he told me, was fixed by his crafty son using just a few dollars worth of diodes!


")





Wow!
I am amazed at this story. I have been having the same problem with a Raymarine S3 controller for several years.
Mini-history: I had a full Raymarine system installed on a new Catalina 42 in 2004, including an S3 AP computer and a ST6001 control head. The system worked quite well for several years, until a lightning strike took out the computer. I got a repair from Raymarine, which is actually a replacement of everything but the case. The system worked again, but it now had the XTE error. In my case the abrupt steering was 30 degrees, not 50, but otherwise very similar to what you describe. This was in 2008.
I complained to Raymarine and received the following response, “We have had more than a few people complain about this but once they understood what is happening, they were fine with it. However, some customers where still not happy with it. We have new software that dampens down this turn. If you would like the new software, you will need to send the computer in and have it installed.”
My answer back was, “Thanks for your response. I understand (and always understood) exactly what was happening. I am not “fine” with it, but I will just have to live with it. I don’t want to send my system back. I think it is quite absurd that the design folks put such a drastic action in place. Have any of them ever been on a boat? The only time I can imagine a need for such a dramatic course correction is when navigating a narrow channel. I would never leave the correction up to an autopilot in that case, but I suppose some folks would do so.”
It is hard to understand the rationale for lots of programming decisions by any number of companies. However, this one seems to be not simply a quirk or a preference but rather a dangerous “feature”.
I hope that highlighting this issue in Panbo may finally get some attention to the problem.
My AP behaves as the newer one described above does. I find this behavior obnoxious, a little dangerous, and less efficient than simply correcting the new heading to head towards the destination.
If I dodge around something by a few degrees and then resume the AP the boat takes a hard turn that will toss around anyone standing. Why? Especially in a big open body of water with nothing around? As Ben points out there are settings where this is the preferred behavior (in a tight channel, etc) but those settings aren’t that frequent and at least for me not likely to result in the use of the AP. Additionally, for those settings it seems like it wouldn’t be too hard to allow the resumption of the originally plotted course as an option requiring a few more button presses.
Ben
A 777 will do the exact same thing, if the XTE is big enough it will crank hard over to a 90 degree intercept to get back on course as fast as possible. If we have to go off course for traffic or thunderstorms we keep it in heading select, get on a shallow angle to the original course and wait until we’re close enough to the course so the plane will just smoothly intercept it when we put it back in LNAV.
You don’t want to just casually delete a course line that may be set to avoid an obstacle you may be too tired to remember at that moment.
Ben – this is a fairly simple problem to solve in the autopilot software. The problem is directly analogous to a basic process control problem. Say, for example, that you have a tank with liquids flowing in and out of the vessel and you want to keep the liquid level constant. There’s some upset and the liquid level changes. How do you move the valves controlling the flows such that you restore the liquid level to its desired height? Well you can overcontrol it and the valves start slamming back and forth (the 50 degree hard turn to overcompensate) or you can use a more advanced PID control algorithm to bring the liquid level back to the setpoint in a more gradual fashion and not destroy the valve seats (return to desired heading).
In your case, the liquid level is the course track on the plotter, the upset is the deviation around the lobster pot, the tank level controller is the autopilot, and the valves are the rudder.
This is not new technology. Raymarine should be able to easily put this in a standard AP.
My Simrad autopilot, directed by Furuno NN3D, behaves as Wayfarer’s does. Typically, but not always, I do not wish to return to the original course, so I go straight to the waypoint by pressing Furuno’s equivalent of the “reset XTE” button. I appreciate having both alternatives, and I don’t think its a big deal having to push the reset button (although it helps to push immediately before resuming a/p, rather than after, since otherwise the a/p will have started the course change back to the original course). I guess I would prefer that the default be to head to the waypoint, rather than to the original course, with the additional button pushing reserved for the relatively infrequent times that I do want to return to the original course.
I have a Simrad AP28 on my boat. It is possible to choose the steering behavior when off course between the two modes described in your article “old Raymarine” steer to waypoint regardless of original course and “new Raymarine” steer back to follow original course.
I have mine set to the mode preferred by the fellow in the article because it avoids large course changes. If there are obstructions or some other reason to resume the original course line, I just steer manually until I am back on the course to avoid the more extreme changes the autopilot would perform.
This is clearly a software issue that at least one company solved quite a while ago.
My five year old Raymarine autopilot works exactly as described.
But it isn’t that difficult to work around the problem. After altering course by 10-20 degrees, yes the pilot sometimes heads off course by 20,30, maybe 50 degrees to get back on. The closer you are to the waypoint the more it turns to get back on- simple geometry at work here.
But you can easily overide the 50 degree course correction by turning back the other way by 20 or 30 degrees. Sometimes it takes doing this twice or at worst three times, but eventually you get back on course pointed towards the waypoint.
Is this wrong? Well I don’t think so. You plotted a course not only to get where you want to go, but to avoid obstacles, shoals, etc. Simply setting a new course from the off track position could possibly get you in trouble. So I think Raymarine’s approach is the right one.
But I often do set a new course, but it doesn’t happen automatically. If I change course to avoid an anchored ship rather than a crab pot then I am pretty far off of the original track. I simply cancel the course and set a new course to the waypoint. Takes maybe 10-20 seconds.
David
Perhaps I was not quite clear. The dramatic turn behavior occurs even when I have done nothing to cause it. No dodging, no scenic joyrides, no nothing. If the boat drifts off course for whatever reason, including wave action, wind gusts, or currents, by as little as 0.01 nm (sixty feet!) the AP often decides to make an immediate and drastic correction of 30 degrees. Of course it overshoots and oscillates for a few cycles.
If I am purposely dodging something then, a) I am completely on top of the situation, and b) I can easily reset the XTE or ease back to the original line if I wish.
I went through every possible adjustment of the response settings, and nothing helped without completely destroying the AP functionality. Raymarine agreed there was no user setting that could fix the problem.
The default behavior is so bizarre that I rarely use the automatic route mode. I will load a route and follow it manually by periodically changing the AP heading.
I should add further that my Simrad autopilot also requires user confirmation if the course change to resume steering to a waypoint would be more than 10 degrees, which also avoids being surprised by a sudden course adjustment.
I looked back at the manual for the Furuno FAP-11 autopilot that was on my old boat. It also had a setting to control whether to resume course after dodging by going back to the original course line (new Ray) or by steering from the current position on a new course line (new Ray).
That makes two manufacturers who have addressed this problem.
Did you check for a bad heading sensor? If the autopilot is trying to track a course with wrong or erratic heading info it could get itself confused.
If your heading sensor is as old as your Ray300 it could be way past time to replace it. It may hold an absolute (but incorrect) heading perfectly in heading select and completely mess with your AP’s “head” in tracking mode.
Any metal end up piled near it?
The new gyro stabilized heading sensors are said to improve course tracking markedly.
Ben,
The SPX30 works the way that Furuno and Simrad Autopilots function and it is normal. The XTE Gain is very high because this is what customers demand in narrow channels and when they are watching their plotter screens. Note that the XTE information coming from the plotter will change rapidly in this situation but, the Course-to-Steer (CTS) value also coming from the plotter may not change much at all during this type of maneuver.
Most customers I have been involved with want to “Feel” the pilot fighting back to the original track line and expect to see the XTE value return to zero when they dodge an obstacle on the track line. If they want to steer straight to the waypoint from their position after they dodge, they simply need to reset the XTE on their plotter which may or may not be easy to do depending on the plotter. This customer obviously didn’t feel he should have to perform this step but he will have to if he wants the boat to ignore the original route and track line.
I agree that the pilot is working as designed and it is the same for many other manufacturers. It is cool that the raymarine pilot display can ask the operator and then force a raymarine plotter to reset the XTE value to zero if it senses that a dodge maneuver was performed.
The conditions described have nothing to do with the PID Controller Setting of the autopilot computer.
Eric
Eric – perhaps I was not clear enough in my original post. I did not maintain that the fault was in the AP’s fundamental PID schema that adjusts the rudder basis an error between a desired and actual course heading. I have a Raymarine AP and that feature works very well. Better, in fact, than I actually expected when I bought the boat.
I used the PID controller analogy to illustrate the proper response between a deviation manifested in XTE; i.e. actual position versus a preferred position along a route. If the AP actually used a PID mechanism to compensate for this error (which it should do given the comments on this page), you would be implementing a cascading PID controller inside the AP.
Quitsa, I have not seen where the choice of “return to course” modes is available in the Simrad AC12 course computer and AP28 control head I installed last summer ( http://goo.gl/v32RK ), but I do like how the NSE puts up a confirmation dialog box saying something like “The autopilot needs to turn 43 degrees to port to return to course…Confirm or Cancel.”
That’s the sort of thing that would make the owner I’m writing about clearer about what’s going on, but I’m afraid it only happens within the Simrad system. I’m not even sure the same message shows up on the AP28, as I’ve only tried it from Gizmo’s flying bridge, but I am sure it didn’t show up on other MFD’s that were on the same NMEA 2000 bus.
I do think that returning to track line (if beyond some XTE value like 75 or 100 feet) is the norm for modern autopilots, but I also sympathize with the owner. Here in Maine dodging lobster pot buoys is a very regular occurrence — which is why so many sailors love those + and – 10 degree buttons on Raymarine AP’s — but there is often plenty of deep water on either side of a route line.
I just installed a new Furuno autopilot, Navpilot 500, and it offers the option of returning quickly to the course or returning to a new course to the next waypoint. This works well, chose the immediate return if one has found a line through several potential obstructions or in a relatively narrow channel. In this case a gradual return might cross over an unexpected problem, in the ocean a gradual return would likely be easier. Either is easy to choose on the Navpilot 500.
No relation to Furuno, just a long term happy customer.
Will
I think the title is misleading. The main problem here and in many of the comments seems to be the autopilot is too aggressive in steering back towards the track, causing the large turns and overshoots. This should be fixed with a gain change, so the boat returns to the course line smoothly without oscillating or spilling your cocktails.
Steering to a courseline using cross-track error, in my opinion, is the best thing the autopilot can do when off course, since it is what you asked it to do when you turned it on (follow this path). There usually aren’t rocks in the way if it steers directly at the waypoint but if there were you would be even madder at raymarine. If the boat only steers toward the waypoint from wherever it is, the path will have a violent spiral as the waypoint gets close if there is any sideways wind or current.
Ben,
I’ve also experienced the crazy correction. I slowed the response time way down which seemed to help. At least the autopilot doesn’t throw you off the boat anymore. I’ve also heard the line that Autohelm/Raytheon/Raymarine/I forget who owns them now “was going through a rough patch then,” for about ten years now. I just installed a Raymarine system where I had to use Seatalk, Seatalk NT, Seatalk 2000 and NMEA 0183 just to get most of the information to be displayed.
I disagree that this is just a matter of aggressive auto steering. Changing an AP’s gain settings or only steering to a course instead of a waypoint are just work-arounds for people whose AP doesn’t behave as they’d like. What’s pretty evident in this valuable discussion is that there are two methods of recovering from a dodge, and some boaters like one and some the other.
I’m pleased to see this concept verified by Furuno, which does indeed offer both methods on the Navpilot 500 (as Will notes). Here’s the reference in operator’s manual ( http://goo.gl/2SRzD ):
“When your vessel goes off course while navigating between the origin (previous waypoint) and your current destination waypoint because of a remote control command, etc. the NAV mode uses one of two methods to get back on course: COURSE or XTE. (See figure in below.) If COURSE is selected, the NAVpilot-500 will calculate a new course based on your new position after dodging, etc. that will take you directly to your destination waypoint. If XTE is
selected, the NAVpilot-500 will use XTE or cross track error to steer the boat towards your ORIGINAL course before dodging. You may select, either COURSE or XTE as shown below.”
I can’t find a similar mode choice in the Simrad AP28 manual, but maybe Quitsa can point me in the right direction. I did confirm that the course change confirmation does appear on the control head as well as a Simrad NSE, and also that the 10 degree warning limit is adjustable.
All of the comments are are generally correct, and autopilots can be very finicky to set up, coupled with the fact that steering behavior of every boat is different. The AP’S job is to keep you on the original course line, and not to create a new one, unless you request it. The abruptness of course intercept change can be calmed down by playing with the gains, but at the price of time/distance to intercept. I try to explain this to clients this way. The gains controls how aggressively you want a change to be made (a lot of rudder, or less rudder), and the response rate controls how often you want a change to be made (Slow= sloppier steering,Fast=tighter steering. These are not all of the possible settings by any means, and some boats just don’t steer well at all no matter what you do and this can be caused by too much weather helm, the tendency to bow steer, hull/rudder design et al. Then throw in winds, and currents. It is always a balancing act based on conditions. I have historically had good luck with the Ray units, and most of them behave well. Don’t ever be setting on the bow, with adult beverages, believing a pile of integrated circuits will keep you safe, and will steer well. Always stay at the helm and be vigilant while letting the pilot drive the boat, they are not perfect machines.
I’m tempted to say that the Furuno technique is the best one: have a configuration setting for “resume original track” versus “calculate new course to original waypoint”.
The trouble with such an option is that it adds complexity- not a problem for the skipper, but it could cause a problem for crew who are told to take the helm but aren’t familiar with all the options of that system. The skipper needs to be aware of this and must take the time to train his crew appropriately.
I would expect the default behaviour, though, to be as described in previous comments: get the boat back on its original track. MFDs and autopilots are not yet smart enough to notice that the direct course from the new position comes just a bit too close to that barely-submerged rock that the original course cleared by a good margin. Ideally, after the dodge, two options should be presented on screen: “resume original track” and “calculate new course using current position”.
I can’t help but observe, though, that one should not be relying on an autopilot in tight conditions, or when there are many other boats around, or when there are things in the water you can hit. I have been nearly run down on many occasions by large power cruisers on autopilot, whose skippers had too much faith in the computer and weren’t hand-steering when they should have been. Autopilots are there to remove the drudgery when you’re in open water; if you’re using one in the presence of lobster pots, rocks and numerous other boats, you’re doing it wrong.
My Garmin autopilot (GHP10) behaves as obnoxiously as the one you describe, Ben. What’s amazing to me is that there is no “follow current heading until you intercept the route, and then resume” function. I’m used to this function on airplane autopilots, and it seems just the ticket for boats too.
To use it, one would be on a route, dodge a lobster pot, point the boat in the direction one wanted to use to re-intercept the route, and that’s it. The autopilot would then follow the current heading until it intercepted the route, and would then resume following the route. Nothing simpler. Why don’t all autopilots do this?
Dan
I am in two minds about this. My Furuno also does an instant XTE correction, and if you’re not prepared for that, a sudden sharp turn does border on the dangerous. On the other hand…
People rely too much on autopilots knowing what they’re doing, methinks. One I have defined a route carefully I am definitely not relaxed about the autopilot deciding for itself that a new course is fine just as long as it makes the waypoint. Narrow channel or not, the new course is not what you planned. If you had taken the extra precaution of writing down a paper backup of the route, all the more reason not to deal with electronics that tell you “I’m not sticking to your compass readings, but trust me.”
The compromise I could live with would be an XTE correction made dependent upon the distance to go to waypoint. With the waypoint miles away those few feet lost to a lobster pot won’t matter much, so sure, pick a new course. With the waypoint close, get me back on track quickly, please! In short, introduce variable damping according to the DTW. Better still, dependent on both DTW and the calculated turn angle; when the theoretical turn angle exceeds, say, 20 degrees, apply damping – or make the whole formula progressive.
HMMMM? I had the software in my Raymarine S3G upgraded last year and I discovered during testing that when I dodged a pot with my ST600r hand controller the tracked course I was following was automatically ended and I had to reinitiate the track EVERY TIME! The Dodge Reset My Autopilot Every Time. NOT IN MAINE… I Discovered after calling the person who did the upgrade that this was a design change by Raymarine. Probably to get around the problem you are discussing. I had the old software installed and all was well…. After I dodge, my boat calmly returns to the track at a rate that I can adjust. I have never had a problem with the old software and I am glad I have it back… I always dodge out and back as well.
I have a Simrad AP28 connected to a NN3D. The problem as I see it is in the interface between the AP and the plotter. The AP is going to do whatever the plotter tells it, so I just have it reset XTE when I have to dodge something, no problems.
The AP28 does have some nice features that limit rate of turn. Not sure if other AP’s have this feature, but my old Robertson did not. The AP28 can be set to limit a rate of turn or even limit it by how much the boat rolls in the turn. It’s quite intuitive this way. I’ve limited my AP to a rate of turn that causes no roll or discomfort for passengers. It’s my believe that if I need a more serious rate of turn, I should be doing it myself with hands on the wheel.
I also agree with the earlier poster that I wouldn’t use an AP is a tight channel.
The problems with so many of today’s electronics are that you must spend so much time learning them and their features to get the most out of them.
PS. I looked at this problem when Garmin first came out with their 4000/5000 series plotters and even called them. They thought the idea of resetting XTE was silly and told me that there was no need. I was happy with that answer, because it made the decision to stay with Furuno easier (and I’m still happy I did that).
Its worth pointing out that Rays SPX autopilot coupled with the ST70 control head also offers the two options when a dodge is requested, a popup displays essentially asking you to confim a return to the original track or create a new track from present. It also does the same for non track following , ie in “Auto Mode”, here a popup request a return to the old course or continue on the new course ( post dodge).
I do aggree that in my opinion the Gain of the system is wrong if such an agreesive return to zero XTE is needed. I sailed recently with teh latest SPX-30 and ST70 autopilot and it did not exhibit any particular agressive behaviour to control XTE.
SO thats three manufacturers all doing the same
Dave
Thanks, Dave, that’s good news, I think. But there seems to be a catch for someone like the owner of this particular boat. Here’s what it says in the ST70 Pilot Controller Guide ( http://goo.gl/oQqMx ):
“Using Dodge in Track mode
When in Track mode, press DODGE.
The DODGE popup will appear over whichever pilot
view you have currently selected.
Once you have finished steering manually you can:
• Press DODGE to track from here to the next waypoint, or
• Press AUTO to return to the previous track.
Note: The dodge to track feature requires a compatible multifunctional display.”
I don’t know for sure but a “compatible multifunction display” may only be one from Raymarine.
I just got the following note from the owner of the boat being discussed. But first I’d like to say that I do not share his specific assessment of Raymarine. At one time or another I believe I’ve witnessed intelligent, competent boaters like this gentleman become equally discontent with every single marine electronics manufacturer, and many installers! I think it’s more because the niche is extremely complicated than it is poor design or poor customer service, but when it happens it often ends up costing every party involved. Which is the point of the entry title I failed to follow up on. Regardless of who’s to blame, one of the reasons marine electronics are pretty expensive is because of situations like this one.
At any rate, here’s a comment from a guy who has paid dearly and who definitely wants the “Dodge to new track” mode he once had:
“At the end of the day the issues here are neither complicated nor subtle.
The first is the fact that the tracking algorithm that Raymarine uses produces steering behavior which can have dangerous consequences. No competent helmsman would ever steer a boat in this manner, and for that reason from what I hear 99 percent of the owners of this unit never use the tracking feature.
The second is Raymarine’s attitude toward its customers, installers, and dealers. It appears that company does not wish to take ownership of its problems even when simple fixes are possible. By ignoring its clientele instead of resolving problems of their own creation, they are, minimally and rapidly, attaining a very unenviable industry reputation.
The third is more general. It is our tendency to lose focus on why we have instruments in the first place – to assist in making seamanship safer and more efficient. Today’s hype with bells, whistles, and technical jabber tends to obscure and distort this goal. Too often the result is real time performance which is neither safe nor efficient.
On these issues Raymarine has scored one for the Luddites.”
If I can assume that the photo at the top is the boat in question (sail boat),it is really two boats in one. The first is a full displacement power boat when the sails are furled, and a sailboat when the sails are up. Within the sailboat scenario there other possible configurations, ie 150% head sail only, full sail, main furled only, you get the idea. My point is that it is difficult to take an all purpose pilot, and make it perfect for a wide variety of conditions, and possible vessel configurations.
In the end, my point is that some compromises are required. What works well at low speed, may not work well at high speed, or reverse it. I know that reducing the gain on the Ray, will provide less dramatic action, but at the expense of a slower intercept to the course line, whether caused by XTE or a dodge.
I understand the owners frustations, but I have not yet found an autopilot that is perfect for every boat, sea, and weather condition. I also under his frustrations with tech support groups, I spend more time then most using them, but with very polite deference to the frustrated owner, I have found the Ray staff to be generally excellent. The only problem they have is they are not there on the boat, and can only surmise scenarios they think might help, based on what people tell them, and they can’t re-write the software. I do agree it is a complicated world.
Whats rally needed is a settings that allows the user to specifiy the rate and which XTE is resolved, system gain and rudder response are somewhat crude for this. ST70/SPX has a setup feature that allows the turn rate to be controlled. ( in degrees per minute) but only when the PSX is configured in “powerboat” mode
Dave
Speaking as someone who is outfitting a hydraulically steered sailboat for world travel, and who already has a windvane, I am very interested in advancements in AP design and function.
However, the only AP I own and use is an antique Autohelm 1000 tiller pilot on our old f/g sloop. It’s a dialled-in rough direction that corresponds to heading, and it takes a couple of minutes of tweaking to get it to steer a given course. Once set, however, it’s better than a human, and does not know the meaning of XTE. It’s also not connected to a GPS.
I may be old-fashioned, or addicted to simplicity, but I do not see the need to sail to a waypoint using the AP. The sea is too dynamic, harbours too crowded and the flotsam too random to assume that there will not be diversions between two points, particularly coming into a harbour or otherwise “inside” from the sea. So my ideal AP is something pretty basic, like the ComNav APs. If I see something (because I’m supposed to be looking ahead) in the water I want to dodge, I simply suspend the AP and hand steer 10 to port or starboard, and then 10 back. Then I put the AP on again. A couple of growls as the course is reestablished later, and the task is done. Rarely do I have to touch a sheet.
I have seen, however, boats make sudden lurching movements some distance from boats that are likely to cross their track and their boats closely. I can only assume that the AP is being told to dodge a few degrees off to avoid an interception, and then lurches 50 degress the other way in overcompensation, as described. The slatting and banging of sails and rigging can be heard some distance over the water, as can the colourful nautical/biological terms.
So I am disinclined to get fancy when it comes to APs. I will input a course and the AP can solve the steering. AP to a waypoint isn’t worth it, and adds more potential hazards than it does solve problems.
Of course, I would say that: My other AP is a wind vane.
Marc, of course you’re free to use an autopilot any way you want, but it is not right to characterize steering to a waypoint as an assumption “that there will not be diversions between two points.” Carefully preplanned waypoints are valuable, especially up here where we spend a lot of time passaging among islands that can be confusingly similar (and where ‘soft’ groundings are nearly impossible).
And it shouldn’t be hard to autosteer to a waypoint while dodging. Thanks to commenters, we’ve learned that several major manufacturers, Raymarine included, make it easy to dodge like you do and then start a new track to the already selected waypoint, without worries about gain controls, angle back to track, etc.
Ben, thanks for the quick reply. I understand the value of waypoints, and perhaps my preferences would be closer to yours were I in your highly tidal and rocky-bottomed cruising ground, but while I understand that there are software work-arounds for this “automatic over-correction”, for the moment I prefer to keep a more hands-on approach. Were I a fisherman or a powerboater going to and from the same approaches every day, I might have an entirely different viewpoint, but I’m lookin at an autopilot from an open ocean “extra helmsperson” point of view. Every harbour we arrive at is going to be new, so the last 10 or 20 NM will probably be on hand steering or just to waypoints confirmed some distance from anything solid.
The Comnav unit I’m looking at has 1 and 10 degree “veers”, like some of the lower end Ray units, and it’s a feature I like and would use when motorsailing to correct for wind shifts. Sometimes you can use the pilot of course to purposefully divert a bit so that you arrive at dawn and not at 0330H local time, so this “strategic” use of APs is also of interest under sail. With motor, of course, you just go straight to your waypoint and throttle well back if you’re killing time until breakfast!
I think this discussion shows that different captains want different behavior. And the same captain wants different behavior in different situations.
I have an SPX30 with ST7001+ controller driven by a Furuno MFD. It exhibits the same behavior as originally described in the posting with an agressive change of course to zero out the XTE. However, like some of the other systems mentioned here, the Furuno MFD allows me to zero out the XTE and start the course from my current location.
I invest a lot of time in planning a route to ensure that I give a wide berth, or as wide as possible, to islands, rocks, hazards, etc. Having invested that time, I know that the route I’ve planned is as safe as possible given the available charts and information. This means that later on, when approaching a waypoint, I don’t rethink the entire situation, I’ve done the homework and when in doubt I trust my route (of course a visual hazard will change all that).
On passage, if the wind direction permits, then we have the AP drive to the waypoint with the Track function. The combination of leeway and ocean currents almost always means that having the AP drive to a compass heading will generate significant XTE fairly quickly. Driving to the waypoint allows the AP to correct for leeway and current set.
When I deviate from the course, and the next waypoint is far in the distance (e.g., > 100nm), then resetting the XTE will only change the CTS by less than a degree and doesn’t impact the safety of the route.
However, when closer to the waypoint I make sure that I stay on the intended route and I want the AP to get me back on course quickly.
Offering lots of options gives the captain choices, but also the burden of knowing which behavior they have selected. I agree with the SPX behavior. If the captain doesn’t want that behavior, then he should drive to a compass heading. Having the AP ignore XTE everytime you deviate will eventually lead to putting the boat onto a hazard. XTE is not called “error” for nothing.
Am I alone in thinking that steering by autopilot in an area where there might be a proliferation of pot markers or similar obstructions is unseamanlike at best?
Surely in such conditions there should be a live helmsman on the wheel?
Daik, using an autopilot does not mean that a live person isn’t at, or very near, the helm. I regularly see perfectly seamanlike boaters crossing bays full of pot buoys with ap assistance, and I do it myself sometimes.
Having a well behaved ap help with the steering chores often means that the watch stander can better concentrate on looking out for obstructions, avoiding collisions, and minding the navigation. The idea of a vessel driving along on autopilot with no one on watch is largely mythical, especially in coastal waters.
It would be grand if the AP/MFD could figure set/drift and provide a compensating course to steer. All the data is already there.
Isn’t that what the “No Drift” mode does (Simrad)?
I think you’re right, Quitsa, though Furuno may have been first with the idea in the Nav 500 (where it’s called Advanced Auto mode). In either case, I believe what happens is that when you set a course to auto steer, the AP establishes a “virtual” waypoint way down that course line and then uses it to compensate for set, drift, and leeway.
The difference is powerboat vs sailboat waypoint course acquisition.
Sailboats often don’t care how long it takes them to reacquire the course. They’ve already planned the trip to avoid shallows, stay out of the shipping lanes and generally provide enough seaway for modest course deviations. In addition, their courses are often planned with respect to the wind. Massive course changes bring the boom around without announcement, which is dangerous to both crew and captain (particularly so when the captain doesn’t know how his autopilot works). Their energy is “free” and short deviations don’t really cost them anything.
Powerboats have this thing called fuel flow. Every minute that goes by with them off their already optimized course costs them money. In addition, they’re probably traveling a shipping lane, river or inter-coastal waterway with limited space to maneuver. direct reacquisition of the waypoint course is considered “the way it should work”
The correct solution that will keep both communities happy is called a sigma curve course reacquisition and I’d be happy to program that for Ray Marine autopilots for a slight fee.
Hummm… then again, may it’s time for open source boat electronics and the code that runs the electromechanical sub-systems.
Sorry, Anontrol, but you’ve made a lot of incorrect assumptions. My powerboat often travels the same tracks as sailboats, and returning to a track does not save fuel versus simply starting a new track to the waypoint after dodging something.
And I think we’ve already learned here that there is no “correct” way to deal with this situation, except perhaps to offer a choice between the two different methods, which many manufacturers do.
Open source autopilot software? I don’t think so!
This rather popular thread shows once again how much effort it takes to do careful research on marine electronics so the set of features is well understood. As Ben notes, the various autopilot manufacturers have taken different paths in their software. If you want to have an easy choice on which way the pilot handles returning to a course when steering to a waypoint, go with Furuno or Simrad. I am glad that my system does what it does, but confess it was dumb luck since I did not focus on that feature.
As for open source autopilot control code — no thanks, I am happy to pay a manufacturer to take responsibility for an integrated system.
We agree again, Quitsa! But let’s add that Raymarine also offers the choice if you use the ST70 AP control head (and maybe also a Ray chart plotter), and other manufacturers not mentioned here so far may too. Let’s also hope that those who currently don’t give their AP users a choice about how to handle “return to course/track” will see from this thread that it’s quite desirable.
By the way, if that’s your charter fishing boat I can see by clicking on your signature, she’s a beauty.
Thanks, Ben. That is indeed my boat. Perhaps you noticed from the photos my rather excessive attachment to electronics (not helped by your outstanding site which is always giving me new ideas)– two Furuno MFD12 displays below and an MFD8 on the tower. It will be a struggle to resist a CHIRP sounder when Furuno launches their version.
After reading the entire thread I find that no one discussed the original setting up of the pilot. Most pilots have an initial set up procedure that requires you to go in circles to set up the compass, and also they have auto-learn features. The first thing I do before setting up a customers pilot is take the wheel in manual mode and check to see how the vessel behaves. How much rudder it needs for so many degrees of correction? Does the boat slide over and make lazy turns etc? If the vessel is hard to steer manually the pilot is going to have a hard time.
The set up procedure produces a bunch of auto gain settings, counter rudder, and rate adjustments. Most of the time these numbers are pretty good, but just for the current wind, current, and current conditions.
If it is found the the boat has a tendency to over steer an adjustment in the calculation can be made at that time.
Most autopilot installations for sailboats are set up while under power running about five to six knots. It is very difficult when you throw variations of sail aloft, balance, and trim. You would need 25 or so selections. The older pilots let you manually adjust for rudder gain, counter rudder and rate. In effect you, the helms person, was the PID (Proportional Control) setter. It took a lot of time to learn how to get to know your pilot. Most people expect to press the button and every thing will be done for them. The pilots do a great job considering the input from the operator.
It may be appropriate to reduce the max rudder correction and/or rate of turn so the correction to XTE would not be so abrupt. That would I think solve most of the problems discussed here.
Autopilots are rather complex devices, and the operator has to put in the hours of learning and adjustment to get it behaving correctly for his condition.
Murray-RadCom
Murray, the autopilot discussed in this entry was set up fine by the electronics crew at Wayfarer, and it was checked by the team from Raymarine. And it steered the boat well. What it does when steering to a waypoint and asked to recover from a dodge has very little to do with gain settings, counter rudder, etc.
The logic designed into the AP looks at the XTE and if it is over about 75 feet, it is willing to turn as much as about 40 degrees off whatever course you’ve dodged to, regardless of the actual course to the waypoint, in order to get back onto the original track line. There was a bit of oversteer when it finally returned to the original course, but none of the turns were particularly violent.
The real problem here is that the AP was not applying the logic that the owner, and many other boaters, want it to. And whereas this particular owner had had a Raymarine AP for years that did what he wanted — simply turn back toward the waypoint and start the XTE over again — he was convinced for a while that the new AP was defective.
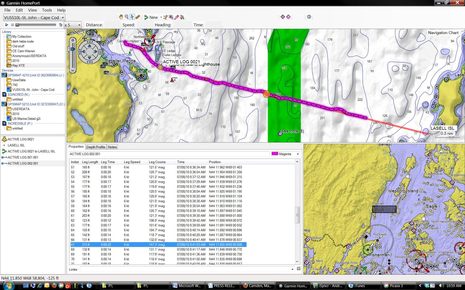
In fact, I created that particular Garmin split screen and data box up there as an aid to help him understand what the AP was going to do. When you could see just how much XTE you’d created by dodging and where you were relative to the original track, you could predict what the AP was going to do when you reengaged the go-to-waypoint steering. And it’s logical behavior if the primary goal is stay on the original track. It’s just not the particular logic the owner wants. That’s the story here.
Waypoint Switching Method on the Garmin? Cirlce vs Cross Line vs Both? What about the Rate of Turn (ROT)?
I looked through the user and install manuals, Brendan, and didn’t see much detail on those subjects, nor any on what the Garmin pilot does in terms of returning to a waypoint after dodging (the entry subject).
I believe the Garmin pilots do base their rate of auto turn on sensed g force, and it’s adjustable. In other words, it will turn quicker when the boat is going slower. The original developer of Garmin’s pilot, Nautimatic, may have been first with this.
Apart from the autopilot behaviour, the other thing which hasn’t been commented on is the problem in interfacing the instruments.
Recently I’ve been looking in detail at NMEA0183 data from a whole range of instruments, and in particular the GPS position, time and depth data. Implementations of NMEA0183 seem to be getting worse, not better. On the GPS side, we have GPS receivers suddenly losing a fix for no apparent reason (a fixed test installation with 360 degree clear skies), jumping several hundred miles and continuing to mark the fix as valid, or another GPS deciding to flip East and West and then flip back again, or at startup when acquiring a fix outputting a position either of the company HQ or 0N, 0E as a valid fix. On time, some receivers suddenly jump by several hours, or update the time but not the date for a considerable time past midnight, or at startup output a time starting at 00:00:00 and counting up by seconds until a fix is acquired. On depth, many of the smart transducers in particular output the depth below transducer as the depth below waterline, and output a transducer depth offset of 0, or some output different sentences in DPT and DBT. In TeamSurv we have the server side processing to cater for all of these idiosyncracies and more, but what hope is there for the installer when just plugging two bits of kit together after checking the NMEA tags in their specs? It’s a mess, and one that deserves more publicity so manufacturers get it right!
Relative to the comments, here is the link to a story in the local press about an autopilot incident. I know the owner, and spoke to him today after the incident. I have talked to him about a previous incident that occurred when he left the helm, (insert pointing finger here) and he almost left the boat during an XTE correction. Don’t leave the helm with the boat under autopilot control ever. If you need to leave the helm, full stop the boat first. It’s a much shorter swim. All is well, it is better to lucky than smart, and being a good swimmer helped, at least this time.
http://www.myfoxtampabay.com/dpp/news/local/sun_coast/boat-runs-aground-after-owner-falls-off-04202011
Ben, when I hear you state that the problem is that the AP will turn 40 degrees when 75 ft off the courseline, it sounds (to me) like maybe 20 degrees or so might have been acceptable, which is why I (and others, I think) have said this is a gain issue. Not the heading error gain but the crosstrack error gain (how much to change the heading command per foot of crosstrack error). I don’t know if this is adjustable; my experience is with UAV guidance and I know it’s a very important number to get right, but I’ve never set up a commercial boat autopilot.
Do you think a slower return to the original courseline would have been acceptable to the customer, or is it the old way or nothing for him?
-Mike
Maybe I didn’t write it well, Mike, but the turning 40 degrees is just a symptom of the problem. It is predictable, designed-in behavior and no adjustment is really going to satisfy this and some owners because they want a different behaviour.
I think we’ve established beyond any doubt that there are two possible directions an AP can turn when asked to resume a go-to-waypoint course after some dodging action. It can simply head toward the waypoint again — XTE be damned — or it can head back to some reasonable but close point on the original track line.
It seems to me that adjusting gain to somehow smudge the differences between two distinctly different heading targets is a poor way to go. Gain is meant to control how an AP holds a heading or steers along a regular track line and it would be a shame to mess that performance up just because you’re trying to get the AP not to steer back to a course line quickly. The obvious solution, offered by several manufacturers, is to offer the user a choice of targets when resuming a go-to autosteer mode.
Just in case the manufacturers are reading, let me add the mode that I’d like to see in an autopilot.
“Follow the heading that the boat is currently on until intercepting the programmed route, then follow it. Beep whenever you change the boat’s course.”
In other words, after diverting away from the route for whatever reason, I’d like to be able to point the boat in the direction I want it to follow in order to get back to the route, then ask the autopilot to follow that course until intercepting the route. Once the route is intercepted, the autopilot should resume following the route.
I’ve used this mode on airplane autopilots, and I believe it would work well on boats too.
Dan
I believe my ComPilot, Commander AP Made by ComNav, has a very good solution to the problem of returning to the track after a dodge maneuver. Here is how the manual explains the way the course computer works.
“When steering along a track, the ComPilot tries to minimize cross-track error by steering to a heading that lies between the perpendicular to the track and the destination waypoint. The farther you are off track, the closer to the perpendicular the heading will be. As you come closer to the track, the heading of the vessel will change closer to the heading of the track. When you are on-track, the vessel’s heading and the track heading will be identical.”
I have the software set for “Both” meaning the correction is a smooth turn and not an abrupt 90 degree correction – a hybrid of both turning toward the destination waypoint and heading toward the track line. I have the option to make the AP turn 90 degrees to get back on track and another 90 to head for the waypoint. This setting option was used once and never again!
Generally, while dodging lobster pots I don’t get too far off course so the AP never makes a radical 90, but more like an easy transition back toward the track and destination. In the case of getting way off course I tend to either reset XTE (I use Coastal Explorer for this) or if restricted by obstructions or depth welcome the radicle turn even if unsettling to watch.
If any improvement can be made to the ComNav software It would be what Dan Freedman suggested above, Point the boat toward the route at the angle you like and let the AP rejoin the original track when it intercepts. What a great idea – wonder why the AP companies never thought of that?
Thanks, Richard. I downloaded the Commander P2 manual and see that they also offer a CTS (Course to Steer) mode wherein XTE is ignored completely and the AP just heads to the waypoint after dodging. So ComNav joins the list of manufacturers who recognize that there’s more than one way to handle this situation. In fact, they offer three!
http://www.comnavmarine.com/html/cmnv9310.htm
But I agree that Dan has an interesting idea, a fourth way of behaving, though no manufacturer offers it yet.