
Navico writer’s event 2014: B&G, Simrad & Lowrance product highlights
 Navico did it again, even better than last time. The company gathered 24 boating writers at the Hawk’s Cay Resort along with a deep roster of Lowrance, Simrad, and B&G product experts and 9 demo boats loaded with gear. The demos very much reflected the refocused brand identities we learned about last year in Las Palmas, and in some cases the Navico team went some extra distance to make them real. Thus, I found myself not only sailing on a nearly new J/111 with B&G’s long-time Race Specialist Matt Fries, but actually pinging start line buoys and later working our way to the windward mark…
Navico did it again, even better than last time. The company gathered 24 boating writers at the Hawk’s Cay Resort along with a deep roster of Lowrance, Simrad, and B&G product experts and 9 demo boats loaded with gear. The demos very much reflected the refocused brand identities we learned about last year in Las Palmas, and in some cases the Navico team went some extra distance to make them real. Thus, I found myself not only sailing on a nearly new J/111 with B&G’s long-time Race Specialist Matt Fries, but actually pinging start line buoys and later working our way to the windward mark…
 My Sail magazine colleague, Charlie Doane, has covered this same demo in great detail — actually, the whole event with “Hax and Flax” hilarity — so I get to chime in with some nuances. Charlie, for instance, explains what’s happening on this amazing start line screen, including the calculated bias advantage in boat lengths to crossing at the starboard pin (which might also be viewed as the speed you’d need to make up if you decide to blast through a hole toward the port end). But I learned a couple of things about the bigger picture.
My Sail magazine colleague, Charlie Doane, has covered this same demo in great detail — actually, the whole event with “Hax and Flax” hilarity — so I get to chime in with some nuances. Charlie, for instance, explains what’s happening on this amazing start line screen, including the calculated bias advantage in boat lengths to crossing at the starboard pin (which might also be viewed as the speed you’d need to make up if you decide to blast through a hole toward the port end). But I learned a couple of things about the bigger picture.
For one thing, this H5000 graphic display is probably the first to show such a sophisticated start screen, which used to be the province of high-end PC racing software like B&G’s Deckman. But while the graphic display apparently has enough processor to run the same NOS (Navico Operation System, a special flavor of Linux) as the Zeus2 MFD cleverly mounted in the J111’s companionway, it can not do the Start Screen without an H5000 CPU working in the background. On the other hand, and in keeping with B&G’s desire to attract club sailors and even cruisers, the graphic display can work fine as just an especially large, bright and fast NMEA 2000 instrument display. Hence, a production builder can easily install a graphic display and tell customers that if they get serious about racing they can simply add the CPU to get the start line screen and other advantages. Let’s also note that a Navico user can get somewhat similar racing aid from third party apps like iRegatta that can use the generous data flow emanating from a GoFree Wifi1.
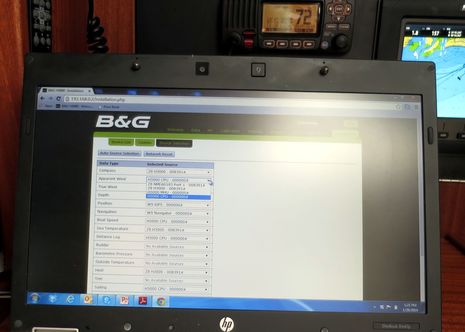 Sailors should check out the SailSteer and layline overlays that Charlie was impressed with (me too) as well as Kees’ H5000 overview on Panbo. But yours truly was willing to go below for a live view of the H5000 web interface in action. I failed to photograph the neat sensor calibration tables and curves it lets you make, but this picture shows how deep the data sourcing is. It’s sort of like NMEA 2000 when it’s done right and you can choose between, say, port and starboard depth transducers or even show both. But the H5000 lets you choose data before or after it’s massaged by the CPU and even apply logic like “if on starboard tack use port speedo.”
Sailors should check out the SailSteer and layline overlays that Charlie was impressed with (me too) as well as Kees’ H5000 overview on Panbo. But yours truly was willing to go below for a live view of the H5000 web interface in action. I failed to photograph the neat sensor calibration tables and curves it lets you make, but this picture shows how deep the data sourcing is. It’s sort of like NMEA 2000 when it’s done right and you can choose between, say, port and starboard depth transducers or even show both. But the H5000 lets you choose data before or after it’s massaged by the CPU and even apply logic like “if on starboard tack use port speedo.”
I also enjoyed hearing product manager Robert Langford-Wood describe the delight of the B&G programmers when the decision was made to manage the H5000 processor via a built-in web server instead of trying to squeeze it into even the powerful graphic display. It looks like the smart future to me, too.
 It was indeed a change of pace and brand identity to almost go fishing with Lowrance’s Lucas Stewart, who is fairly famous here for his tricked-out kayak and his manly StructureScan HD transducer (we had the rods but not the time). He showed us a nice advance in sonar that unfortunately, we can’t share for several weeks, but that is indeed a competitor’s sonar product mounted on the dash of this 24-foot Yellowfin Bay Boat (with mini flybridge)…
It was indeed a change of pace and brand identity to almost go fishing with Lowrance’s Lucas Stewart, who is fairly famous here for his tricked-out kayak and his manly StructureScan HD transducer (we had the rods but not the time). He showed us a nice advance in sonar that unfortunately, we can’t share for several weeks, but that is indeed a competitor’s sonar product mounted on the dash of this 24-foot Yellowfin Bay Boat (with mini flybridge)…
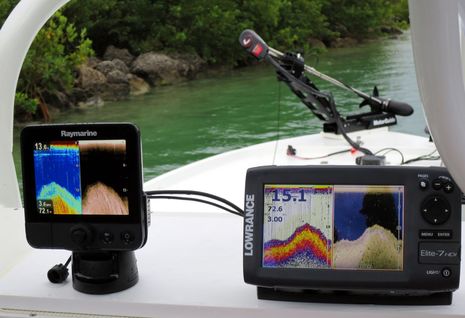 Stewart wanted to make the point that higher frequency Lowrance DownScan yields more detailed information including a deeper bottom profile than the CHIRP-assisted downscan seen on Raymarine’s Dragonfly. But I was confused, because this Dragonfly imagery didn’t seem nearly as detailed as what I saw demoed in Miami last year. But apparently, I’m going to see a new Dragonfly demo next week in Miami and the downscan/sidescan wars are cranking up to a fever pitch, which strikes me as great for everyone, with the possible exception of the manufacturers. And note the Motor Guide trolling motor on the bow with a vaguely visible hose clamp holding something to the motor.
Stewart wanted to make the point that higher frequency Lowrance DownScan yields more detailed information including a deeper bottom profile than the CHIRP-assisted downscan seen on Raymarine’s Dragonfly. But I was confused, because this Dragonfly imagery didn’t seem nearly as detailed as what I saw demoed in Miami last year. But apparently, I’m going to see a new Dragonfly demo next week in Miami and the downscan/sidescan wars are cranking up to a fever pitch, which strikes me as great for everyone, with the possible exception of the manufacturers. And note the Motor Guide trolling motor on the bow with a vaguely visible hose clamp holding something to the motor.
 This is SpotlightScan Sonar, Lowrance’s response to Humminbird 360 Imaging. I had just seen 360 in action a few weeks before on a lake in Alabama and had gotten how it works in conjunction with regular cruise and side imaging. You use those technologies to find the fish or the structure they like and then 360 for the stopped or slow final hunt. SpotlightScan can’t do all that 360 can with its independent mount and scanning motor, but it seems like a darned smart way to get a similar result with less cost and less hardware to go wrong.
This is SpotlightScan Sonar, Lowrance’s response to Humminbird 360 Imaging. I had just seen 360 in action a few weeks before on a lake in Alabama and had gotten how it works in conjunction with regular cruise and side imaging. You use those technologies to find the fish or the structure they like and then 360 for the stopped or slow final hunt. SpotlightScan can’t do all that 360 can with its independent mount and scanning motor, but it seems like a darned smart way to get a similar result with less cost and less hardware to go wrong.
Besides the transducer clamped to the trolling motor, there’s really just an NMEA 2000 position sensor (quite like a rudder angle sensor) you have to attach to the underside of the trolling motor foot pedal control. (Lowrance even provides instructions for how to install one in the pedal of a Minn Kota, Humminbird’s sibling company). Then the fisherman controls his own scan, either with the boat at rest or with the motor pulling the bow around. It seemed quite effective in the shallow water where we tried it, and especially intimate when Stewart spotted a fish and then homed in on it with slow prop turns.
 It was also fun to blast around on a VanDutch 30 with Simrad maven Mike Fargo who first showed me the NSS in Palma, Spain. Of course the thing now is the new line of NSS Evo2 MFDs that essentially replaces both the NSS Sport and the NSE, and also the all new “Heroic” software interface that’s sort of played second fiddle to the hardware introduction…
It was also fun to blast around on a VanDutch 30 with Simrad maven Mike Fargo who first showed me the NSS in Palma, Spain. Of course the thing now is the new line of NSS Evo2 MFDs that essentially replaces both the NSS Sport and the NSE, and also the all new “Heroic” software interface that’s sort of played second fiddle to the hardware introduction…
 It looks good. That “system controls” dialog box swipes down from the top of any screen and you can see how the new autopilot and audio widgets can appear there and/or in the Instrument bar at right.
It looks good. That “system controls” dialog box swipes down from the top of any screen and you can see how the new autopilot and audio widgets can appear there and/or in the Instrument bar at right.
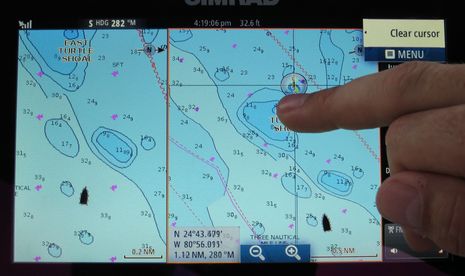 I also liked how a long touch puts the magnifying glass cursor in sight above your finger, so you can place it with great precision. Window sizes are also adjustable horizontally and vertically, a nuance I liked a lot on the NSE and missed on the NSS.
I also liked how a long touch puts the magnifying glass cursor in sight above your finger, so you can place it with great precision. Window sizes are also adjustable horizontally and vertically, a nuance I liked a lot on the NSE and missed on the NSS.

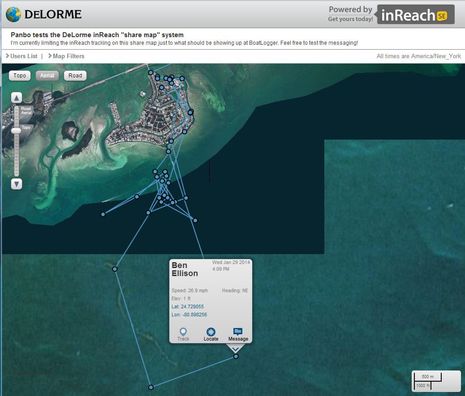
I didn’t get out on the Viking 50 sportfish Tailwalker2, but I did get a peek at her new NSO evo2 system. Twin OP40 control pads manage the twin MO19-P monitors (that will soon be replaced by the 3X brighter touchscreen models that are about to ship). NSO is also running the new interface, and this dual-processor black box system figures largely in Simrad’s ambition to “crush” the megayacht electronics market and make a big splash on the commercial marine scene. But that’s a story for another day, probably after Miami, where Navico will be generating new stories. As much as I learned while boating around Duck Key — somehow home of Hawk’s Cay, and shown with my trusty inReach SE 10 minute satellite tracking below — I may have learned more from the Navico presentations and some solid face time with upper management.








Another interesting new thing in sail racing electronics — plus another sighting of the 9-axis solid state sensor — is the Velocitek Shift compass:
http://www.velocitek.com/shift/
Aw shucks, what a drag that you had to leave Maine now that the weather is so nice in Camden 🙂
One thing I’m noticing is how the “Heroic” (NSS2) interface is starting to share UI features with the HDS interface like that “drag from top” feature and (auto) hiding of menus.
Now that the brand separation is fully implemented I’m curious whether HDS 2T will in turn use some NSS2 features in the upcoming “spring 2014” update. I can understand that fearures like “SailSteer” and laylines are limited to B&G, but why keep autopilot control off limits to HDS owners? It will surely only increase sales (of autopilots!)
Truth is I caught a cold just before I left, was an undesirable on the planes and spent much of the Navico event in a medicinal haze. I’m not complaining, though, and am getting a second chance tomorrow night when my wife and I head to Miami for a week.
I’ll ask about HDS autopilot control (and dual range 4G radar display), but I understand that Navico is putting a big emphasis on Simrad this year and they’re looking for ways to highlight the brand for power cruising and sport fishing. At least one very interesting way will be announced Thursday morning 😉
I also think that the Lowrance and Simrad interface teams remain fairly independent (with B&G adding special seasonings to Simrad’s). I don’t the experience with HDS you have, but it sounds like they’re borrowing ideas from Android, iOS, and Win8 as much as eachother.
The current generation NSS got windows scaling in sw v.3.0 which was introduced in September. Go to the Pages and touch and hold the icon for the window combination to be scaled. When a spinning ring appears remove the finger and a menu with several choices including windows scalings appears. Then a cross point will be shown at the page with the windows to be scaled, this cross point can be moved freely in X and y direction to change the intersection point between the windows.This function is identical to HDS Touch.
… and I am still puzzled that the NSS2 and Zeus2 do not seem to be drop-in replacements to the NSS and Zeus?
By factors of millimeters. One realizes that they have gone from squarish (4:3?) screens to “HD”-like screens (16:9?) but the outer dimensions are different by very small amounts.
Perhaps their market research shows that people only upgrade MFD’s after many generations, as opposed to merely to the next gen?
Ben, I’m glad someone has seen H5000 in the flesh! Announced 8 months before it will ship, there is a lot of pent up excitement. Also plenty of disappointment that it will not be here in time for spring refits for summer racing. Buyers want seat time with new equipment before using it in battle.
From everything I can see and have been told, I think H5 will be a huge leap in the right direction for high end sailing instruments. I didn’t think I would say this… but cheers to Navico for finally seeing the value in the B&G brand and investing in H5000. But please, keep the announcements to within a couple of months of product shipping!!
Millimeters of difference on cutout size should not be noticeable. I think my installer was more than millimeters off on his cuts. For me anyways, the NSS16 Evo2 is close enough to the NSS12.
Lowrance released a software update for HDS Gen2 Touch yesterday.
The 2.5 version includes support for SpotlightScan Sonar, support for CHIRP with SonarHub, FUSION-Link compatibility and improved performance for C-MAP Max-N cartography.
Does anyone know if the Zeus2 or Simrad equivalent accept any type of digital video in (VGA/DVI)? It is time we can use our larger plotters and their great video screens to display some PC info when needed….
I read the reviews on Panbo and brought the 4g broadband radar and B & G Zeus touch 7 plotter and had major problems from opening the boxes. I am an experienced cruising sailor and have clocked up over 70000 nm and also electronics engineer. Installation was easy. From the start though there were numerous glitches with the radar only firing up 50% of the time. The MFD would blank out / freeze / show holes in the chart information on display/ and crash. The radar was mast mounted and had good mid range and close in range but long range was poor and picking up rain squalls was poor. There was a blind spot that was large enough to not pick up a 60ft motor yacht coming up astern until it was overtaking us. C Map N charts had limited functionality and displayed no tidal information. There is a software fix coming for this some time in 2014. Technical support was poor and blamed the numerous glitches on the fact it was self installed. They blamed insufficient 12v supply, alternator spikes, wind generator interference and poor batteries ( battery bank had been replaced with new Gel batteries) . Local approved Navico technicians were not familiar with units, they had no spare cables or units to try substitution to isolate the faults and confirmed that if there was 12 volt supply then that was all they could really check and after that both units would need to go back to factory. So it all looks good in the boat show demo and marketing advert but after struggling to resolve the issues both units were returned for a refund. Brought instead a Garmin HD radar and 741xs chartplotter and installed under same conditions and it has worked faultlessly straight out of the box. Almost identical power consumption. Slightly longer radar on to target aquisiton time but more consistent target recognition and picks up rain squalls and better at long range. Garmin support is outstanding as I made sure to test this by phone, email and online web support whilst the items were still in the no hassle return phase due to the bad experience and fight that I had with Navico to get my money back. Navico after 3 months still owe me money for accessory cables returned to them that I purchased from their online store.The other merchants I brought the radar and MFD units from have now refunded my money. Hope this helps others.
Thanks for that Paul. I’m in the middle of a purchase decison. Would like to hear more from Zeus 7 owners.
Paul, I’m glad your second install worked out better. I don’t know what was wrong with your B&G system, but I don’t recall any similar complaints. I’ve had a 4G radar and Simrad NSS8 installed on my test boat since late 2011 without any “blank out/freeze” or failure to power up issues.
As for Broadband Radar, it’s definitely better at close and mid ranges than distance, and it’s also unusually sensitive to onboard structure interference. I hope a good dealer would have told you that and it’s certainly in my reviews. (Like this 4G hand’s on: http://goo.gl/p34QG )
Here’s another entry comparing 4G and Raymarine HD in rain and squall conditions: http://goo.gl/YYZSd Obviously the Ray magnetron did better, but I can add that the 4G was still better than the Garmin 24HD I had installed then.
In fact I doubt that many users would find a Garmin HD radome comparable to a 4G radome, and the amperage draw is definitely different, with the Garmin HD and other 4kW magnetron radars drawing nearly double the amperage, as I recall. I’m hoping to try a Garmin xHD radome this season and expect notably better performance (though I imagine the power draw will be similar).
It might be useful if you told readers where those “local approved Navico technicians” were because I suspect you had a bad Touch 7 and switching it out without messing with the radome might have been a relatively easy fix for what looked like power issues.
However, I don’t think that many installers for any brand have spare units sitting around to use for swap testing. Plus the warranty standard these days is that you only get onboard service if the equipment was professionally installed or at least inspected by a pro.
Sparky, the Simrad NSS7 is the exact same hardware as the Zeus Touch 7 I’m pretty sure. And there’s a fair bit of NSS7 discussion at The Hull Truth, like this thread about a unit that seemed to have freezing problems like Paul’s: http://goo.gl/KfVEsq
Had the B&G Zeus 12 (same hardware I believe as the Simrad) and Simrad 4G installed in our Tartan 3800 in Mar 2013. We have cruised from Deale MD to St. Pete over the course of the year – has been very reliable for us. Very pleased with the purchase.
Only complaint I have is that they seem to be holding back on a software update on the B&G units versus the Lowrance / Simrad – last update was Jul 2013 for the Zeus. Waiting for the Fusion Link audio server support – this has been available on the Simrad since Sept 2013 .
The THT thread you are linking to is about one single unit which is first unstable and then dies.
I’ve had NSS since September 2011, now have two NSS7 and a NSS12. I’ve had one freeze with NSS7 with the first 1.0.xx software version the first units were shipped with. Already in October 2011 the next 1.0.yy version with improved stability stated in the release note came out. After this I have not experienced any problems with NSS. I probably spend 10x as much time as the average user operating the menu system when I’m out fishing, no problems at all.
Some users experienced stability problems with the first 2.5.xx NSS version related. It seemed as some units had and most hadn’t problems with this version. A 2.5.yy version fixing the issues was soon released. NSS is now at 3.0.xx.
The problem you describe with the radar firing up only 50% of the time looks like a problem I’ve seen in another setup. I managed to locate the problem to NSS12 and Navico confirmed the unit had a problem with the Ethernet interface.
The issues with blind zone you are reporting for the 4G is of course related to your installation and not the radar. I currently have 4G radar, I previously had Raymarine RD418HD Digital. This Raymarine dome was at least until the introduction of xHD domes short time ago the best 18″ magnetron radar. The 4G is much better both when it comes to performance and automatic operation.
Navionics is a much safer choice than C-Map for these units. Especially with previous software versions. Which software version did you use? I see the date for the current Zeus Touch software version (1.1.43.115) is 25th of July 2013. So it should at least incorporate everything from the latest and stable NSS 2.5 software.
I doubt that there is any difference between traditional and broadband radar in their blind spots or sensitivity to structural interference. Is there any evidence to back that up? Gizmo would be a good test bed for a comparison except that the broadband radar is mounted where few would dare mount a magnetron radar (and nobody would expect good performance in directions where it is shooting through the boat). Does anybody else have a stacked pair of radars to compare?
Dibert compares apples and oranges:
http://www.dilbert.com/strips/comic/2014-03-23/
There is a difference, Norse, and I think the Broadband Radar manuals include a pretty strong warning about structural interference. I’ve seen it action moving the original BR24 from Gizmo’s mast to where it is now in front of the fly bridge. I also tried the Furuno DRS19 on top of the fly bridge BR24 mount for a while. The 2kW DRS could definitely see better through the fly bridge structure and all the gear aft of it.
However, I’ve also seen how the 4G version of Broadband Radar definitely handles obstructions better than the original, though I don’t think it’s quite up to magnetron performance yet.
Regarding the “radar not firing up”: I have had and still have problems with the 4G radar where my NSS7 showed the dimmed out radar icon and on a radar page showed a message that there was no radar connected even so the RI10 radar interface was powered up and connected. If I restarted both units one, two or sometimes three times, eventually the radar would be detected and work. I tried to debug the problem and test-connected the ethernet interfaces of the NSS7 and RI10 with a crossover direct coupler. This made no difference which is why I rule out my TP-Link router as the source of the problem.
This problem was much improved (completely gone except for one single occurrence) with the 2.5 and now 3.0 software. In my opinion, this is another indication that it was a software problem.
Then I bought and installed an additional B&G Zeus Touch 7 in the cockpit. The ZT7 has the same problem of frequently not detecting the radar as the NSS7 had before the software updates. However, I now have a more or less useable workaround: While the ZT7 shows the dimmed radar icon, if I then start transmitting from the NSS7, the ZT7 changes it’s mind about the radar not being there and immediately shows the radar picture.
I wish B&G would make the overdue software update available soon.
Regarding the “radar not firing up”: I have had and still have problems with the 4G radar where my NSS7 showed the dimmed out radar icon and on a radar page showed a message that there was no radar connected even so the RI10 radar interface was powered up and connected. If I restarted both units one, two or sometimes three times, eventually the radar would be detected and work. I tried to debug the problem and test-connected the ethernet interfaces of the NSS7 and RI10 with a crossover direct coupler. This made no difference which is why I rule out my TP-Link router as the source of the problem.
This problem was much improved (completely gone except for one single occurrence) with the 2.5 and now 3.0 software. In my opinion, this is another indication that it was a software problem.
Then I bought and installed an additional B&G Zeus Touch 7 in the cockpit. The ZT7 has the same problem of frequently not detecting the radar as the NSS7 had before the software updates. However, I now have a more or less useable workaround: While the ZT7 shows the dimmed radar icon, if I then start transmitting from the NSS7, the ZT7 changes it’s mind about the radar not being there and immediately shows the radar picture.
I wish B&G would make the overdue software update available soon.
Henning, what is your overall level of satisfaction with the Z7T?
Thanks
Henning,
Have you tried disabling the DHCP server in your TP link, and then have the radar and Z7T powered up afterwards. Try this until you get a link, then see if the problem is gone afterwards.
On my boat I saw a difference in network behaviour of my HDS G1 and BR24 when the DHCP server assigned floating dynamic IP addresses. This went away when I either did away with the DHCP server (as in a pure Navico environment) or gave both devices fixed IP addresses. This is really weird as most if not all traffic between the Navico devices is broadcast traffic which does not need knowledge of sending or receiving IP addresses, so I can’t explain this.
Since then I upgraded to H2T and 4G, and I haven’t seen any issues at all with those.
Sparky: Note that I don’t use either the NSS7 or the Z7T as a “chartplotter”. I use Coastal Explorer for that. Because of this, I don’t have a Navionics or other chart card in either one of them. I bought them because they have so many other functions and cost so little. The Z7T in the cockpit serves as an instrument display and a radar display and a little bit as an autopilot controller. The radar display function is the most important and the reason I bought it. This specific function works no different than on the NSS7.
I chose a B&G versus a Simrad for the cockpit as I wanted to get a chance to play with the “Sail Steer” functions. But these require that you have the waypoints that you go to in this plotter. So I first have to learn how to upload a route from CE to the NSS7 and Z7T. Also, these functions are really only helpful when going upwind. And while I like to do that in my protected home waters on a Sunday afternoon, where I am at the moment, the Canary Islands, I feel no desire for it whatsoever. In 25 to 35 knots of trade wind in the open Atlantic with just wife and kid aboard, even a beam reach is something you spend two more days in port to avoid.
So, I’m sorry but I guess you need to ask someone else.
Given that the Z7T has the “radar not firing up” problem which the NSS no longer has and that B&G is slow to fix it, if I had to do it again, I probably would have chosen a NSS instead of a Zeus Touch.
Kees: But I need the DHCP server in my TP-Link router! Also, I think, the fact that I continued to have the problem when I used just a direct ethernet coupler to connect the ethernet ports of the NSS7 and the RI10 with the 4G radar proves that the problem is not or at least not entirely related to any kind of non-Navico ethernet hardware or services – such as DHCP.
The NSS7, RI10 and Z7T all pull an IP address from the DHCP server. I have spent a long time wading through all the configuration options on the NSS7 and did not find a way to specify an IP address. When you say “or gave both devices fixed IP addresses”, do you mean I should assign a “permanent address” in the DHCP settings of the TP-Link router for the 3 Navico devices? That could be done easily. If not, where do you set this for the MFD and the RI10?
When I use Wireshark I find a lot of communication between the Navico devices using IP addresses other than from my pool – like from 192.168.0.104 (the NSS7) using UDP to 224.2.1.2 and to 236.6.7.10 or from 192.168.0.101 (the RI10) using UDP to 236.6.7.15 or 236.6.7.9. There are lots more combinations. I don’t know what to make of this.
But note that I don’t have a problem anymore since NSS RTM 2.5 software.
For the Z7T the current software which is the one that my unit came with is still 1.1.43.115 which exhibits my problem with the radar not detected pretty badly as in more often than not when I turn it on, the radar is not detected.
Henning, “but I need …” is all fine and good, but you are the one having issues…
If the TP link drops just one or two UDP packets this is fine if they come from the radar and contain scan lines, but if they contain the “radar on” command then you’ve just shot yourself in the proverbial foot.
You disconnected the router, but did you fully reset any devices that _did_ get a DHCP address so that they lost it and all started working in the same address range?
I take it that you upgraded the 4G? What software version is your RI10 running? There is a software update that the RI10 needs if you bought it before the NSS, or was from old stock that wasn’t updated. I had to wait for my 4G when I ordered the H2T as my distributor wanted me to have the correct RI10/11 software version.
This is unfortunate but my guess it is a consequence of the added capability to run with dual radar range mode and multiple scanners that was added. The dual range is implemented by having the radome act as two independent radars (and two IP addresses!) so suddenly the exact address of the radar or MFD or RI10 may make a difference (note: we haven’t analysed a network yet running > 1 radar or with the radar in dual range mode, so the above is guess work on my part.)
In this way I can see how later software release in the MFD could also restore operation with older RI10 versions.
In our lab at work we also struggle with the momentous diversity of customer environments. There is always someone that has a setup that you haven’t anticipated, or not tested to the hilt, and then something goes wrong. So I am very sympathetic to suppliers that have stuff which shows some niggles in environments that their customers cook up but that are not what they envisaged.
Note that 224/8 thru 239/8 addresses are multicast addresses. See http://en.wikipedia.org/wiki/Multicast_address
The “radar on” command consists of just two 3 byte UDP multicasted messages, see https://github.com/canboat/BR24radar_pi/blob/master/src/br24radar_pi.cpp method RadarTxOn — you may want to give this a try whilst you are stuck in harbour, and help us improve the radar plugin.
RI10 New Software 1.4.0 and 1.4.1
Improvements in 1.4.0
* SimNet Data Group Source selection feature added
* “No Radar” address claim lockup bug fixed
* Minor fixes and performance improvements of communications with the radar scanner
Further improvements in 1.4.1 (factory upgrade only)
* SimNet/NMEA2000 network lock-up issue in RI10 boot loader
* The bootloader has been fixed so it will enable future upgrades in the field
See the original for more information:
http://www.simrad-yachting.com/en-US/Support/Downloads/RI10-New-Software-1-4-0-and-1-4-1/
PS This is not a new software release (18 July 2012).
For those who might not know that there is an update to the radar interface device.
I looked at the current manuals for Broadband radar to see what they said about where not to mount the scanner. The beam should be clear the superstructure of the boat. Don’t install close to antennas as it may cause or be subject to interference. And this:
That last one may be unique to Broadband radar, I don’t know, but I wouldn’t recommend hitting electronics with a pulse radar beam either. All in all, I don’t see any warnings about structural interference that wouldn’t be common sense for any radar type.
I’ve had a BR24 for years and I never noticed any blind spots. After I saw your screenshots in the July 2012 squall conditions post, I started looking carefully for blind spots. None found. I have an ordinary scanner mount in front of an aluminum mast. The sharpness of the cutoff angle in your screenshots made me think that there might be a metal layer in the superstructure behind your scanner. Since you say that pulse radar worked in that position, that must not be so. Therefore I have revised my speculation (or WAG) to this — The rain in that squall was so intense that it created a wet layer on the superstructure which then reflected or obstructed the beam, making the superstructure blind spot worse than usual.
Hi, Norse. There’s no metal in Gizmo’s fly bridge structure, just balsa core, fiberglass and paint. However there is a fair bit of metal in the many cables, a few black boxes, the hydraulic steering gear and wheel, the chair bases and frames, etc.
The 4G radar screen in that entry is not imaging the hard rain in a large segment aft and is painting interference in that segment on another screen.
https://panbo.com/archives/2012/07/simrad_nss8_raymarine_e7_with_radar_in_the_rain.html
In other conditions the 4G does better in that segment though never directly behind the boat. The BR24 on the same mount did worse, the Furuno DRS19 velcroed on top of the BR24 for a season did best of the three.
Kees:
“”but I need …” is all fine and good, but you are the one having issues…”
Yes, that is certainly true…
If it would turn out that DHCP or any other part of my setup is causing problems with the Navico devices, I would do what it takes to separate the Navico devices. For example, if I found that using a Navico ethernet hub solves the problem, I would order it asap. It’s not that I am demanding or expecting Navico to adapt to my setup. However, it does not look like incompatibility is the cause of the problem.
norse: No, I did not know there was a software upgrade for the RI10. I considered it to be “the same” as the BR24 4G radar and I applied the then current software for the radar (which is still the current version).
I installed 1.4.0 on the RI10 today and will look for a way to have a 1.4.1 factory upgrade done when we return from our trip in August.
I would be very interested in learning if 1.4.1 is likely to make a difference with my problem. Do you know or do you know someone who might know?
I have spent most of today debugging this problem including a temporary install of the Z7T at the nav station to bypass as much of my cabling as possible to rule this out as the culprit.
I am using one Simrad NSS7, one B&G Zeus 7 Touch and a BR24 4G with RI10 using these software versions:
BR24 4G: 4.1.57
RI10: 1.4.0
NSS7: RTM 3.0 – 46.1.66
Zeus 7 Touch: 1.1.43.115
I have tested the following scenarios:
A. NSS7, Z7T and RI10 connected via a TP-Link TL-MR3220 with DHCP enabled. This router has my computer and several other devices connected via WLAN.
B. NSS7, Z7T and RI10 connected via a TP-Link TL-SF1005D 5 port desktop switch. Nothing else was connected to this switch and this switch is not smart in any way and does not include a DHCP server.
C. Z7T and RI10 connected directly via an original Navico yellow ethernet cable. Obviously, in this setup the NSS7 is not connected.
The result is that I have very unreliable operation of the combination Z7T and RI10 + BR24 4G across all 3 scenarios while (with scenarions A and B) I have perfectly reliable operation of the combination NSS7 and RI10 + BR24 4G. There is no noticeable difference in “success rate” between the 3 scenarios.
These are the results and my conclusions in detail:
1. In about 50 to 70 total reboots of the Z7T and NSS7 I find that the Z7T reports the radar as present and lets me use it about 20% of the time. The NSS7 gives 100%.
2. The ratio of 20% is pretty much equal between all 3 scenarios (2 in the case of the NSS7).
3. It does not seem to make a difference if I start the Z7T before of after the RI10 + BR24 4G or simultaneously.
4. With scenario A I can see in the status and configuration pages of the router that the NSS7, Z7T and RI10 are registering as DHCP clients and receiving addresses. I have not tried with permanent DHCP addresses for these. Should I?
The Z7T registers a name of “T-” plus the last portion of it’s MAC address. The NSS uses “NSS-” plus last part of MAC. The RI10 is listed as “Unknown”.
5. With scenario A and B the link lights on the router or the switch confirm that an ethernet link exists and that packets are transmitted even in the 80% of the times when the Z7T reports the radar as not present.
6. I have also tried with bypassing my ethernet cabling to the cockpit by temp-installing the Z7T at the nav station. This made no difference.
7. Whenever the Z7T allowed access to the radar, it would continue to work flawlessly for as long as I wanted while I tried anything to “break it” like cycling the power to the RI10, pulling and reconnecting the ethernet cables, restarting the router (scenario A), going to standby, using the radar from the NSS7 and switching between scenarios (like removing the direct connection and connecting to the router).
The Z7T reported the radar as lost (“timeout”) after a little while but reacquired it nearly instantly as soon as a connection was made. Every time.
8. The NSS7 worked without the slightest hitch. It always worked first time and always reacquired instantly.
9. When the Z7T did not work after a reboot, there were 3 possible scenarios:
i. it would never work whatever I did
ii. it would work after some time, like about 10 to 30 seconds without me doing anything. If it had not started to work after 30 seconds, it never would.
iii. it would start to work when I set the radar to transmit from the NSS7
“work” is to mean the radar icon becoming live and the “transmit” button appearing or the radar image to show up.
10. Across the 40 or so reboots of the Z7T I did have a “series” now and then when it would not work over 10 or more reboots or work over 3 but 3 was the longest run that I had for working.
My conclusion:
– This morning I had thought to have a reliable solution for radar in the cockpit but that was an illusion.
– The behavior of the Z7T seen today is very similar to the behavior of the NSS7 that I had with software 1.0 and 2.0. So I believe it to be a software problem (can’t be fixed by replacing hardware or changing setup).
– The fact that the simplest of setups, just the Z7T and RI10 connected with an original Navico cable, only works 20% of the time would probably indicate a defective unit to most people. Such poor performance should have been detected and fixed in general product testing. However, my 20+ years of experience with this stuff tell me that it’s a software problem and replacing the hardware will not solve the problem. The NSS7 acted just the same and it went away with 2.5. Though of course, I would rather be proven wrong and have my stuff working than the other way around.
– I really hope that B&G does provide a software update for Zeus Touch soon. However, I fear that they might not do this anymore since the Zeus squared is on the market now. If they don’t, I’m going to have to resolve this through a warranty claim which will be a bitch here in the Canary islands and the only solution would be to replace with a Simrad which is something requiring cooperation. We will see.
Ben,
I have been watching for the Simrad NSO evo2 Dual 16 Bundles since seeing them at the Miami show. I have spoke with several dealers who are giving me expected ship dates of “end of April” thru ” late summer”. Have you seen anything official from Simrad? If Simrad is not going to ship the products this spring, I am going to need to figure out a new plan for my helm.
Thanks – Henry
Henry,
We are a dealer and recently were told “the end of April”. I think the displays are the hold up. Navico have a lot of new products on their plate, it will be an exciting summer.
Does anyone have detailed info re: the Z7T internal GPS? Channels, WAAS, etc. This info is not provided in the spec sheets. I also have a call into Navico. Thanks
P.S. I am likely to use a ZG100, but still would like to know.
Based on what you are telling it’s not possible to conclude for sure if it’s a software or hardware problem, and you are not the only one with 20+ years of relevant professional experience (I’m an EE). What you are telling is very similar to what I’ve experienced with a NSS12, and which I’ve told about further up.
The NSS12 had major connection problems with both the 4G and with BSM-2. I had access to a NSS7 which did not have any problems connecting to the two devices. Since these had the same software it was fairly simple to conclude it was a HW related problem with NSS12. The distributor shipped a new NSS12 and everything worked as intended. I later got confirmation from the distributor that Navico had detected HW problems with the Ethernet interface for this unit when testing it at the factory.
I’m sure you are not the only one with a Z7T and 4G, due to this a software problem for a version which has been out for three quarters of a year creating very unreliable 4G connections is not very likely.
Navico support reported Z7T GPS is a 12 channel, WAAS capable, 5 Hz update rate.
In our initial posting we attempted to draw peoples attention to the problems we had experienced with the B & G Zeus 7 touch and 4g combination. Hennings has now also reported similar issues with bg7t and others with NSS7/12. There was also another very angry gentleman that I stood next to in West Marine Key largo who had the same problems and had to return the items to the factory 3 times with no success.
You ask where the B & G technicians were located and we rang most of the approved dealers and technican agents in Miami Fort Lauderdale St petes and florida keys areas as well as Navico Europe and Australia as we were trying to find anyone who could offer some insight to the various problems we experienced with brand new units. I will note at this point that both Navico Europe and Australia were more customer orientated and both diagnosed it as most likely software issues. When we initially reported the problems to Navico USA of the BG7T blanking out and radar not firing up the technical helpline suggested trying a software update but we had got the latest version of software. They altered the diagnosis to either MFD hardware fault or the 12v supply bus. The supply bus ( yellow wire )they instructed should be permanently connected to the positive and not installed as per the remote switching option given in installation manual instructions as they admitted they had had problems with this being voltage sensitive. We did this and nothing changed, same problems. Then the diagnosis was faulty MFD and they had NO MFD units in stock at Navico and did not know when the new stock would be available. Navico did not offer to phone dealers to find a new BG7t unit and left it to us to ring around to find one and to pay for it ourselves. Tried the substitute unit and no improvement,different failure percentage on radar start up but interestingly the failure rate on this unit altered depending on whether we ran it with the embedded cartography or ran it using the CMapN chip inserted. We reported back to Navico technical who were now referring to us as ” its those two again” and asked for replacement cables to try that as substitute as technical were sure that it would not be an issue with the 4g. Navico asked for our credit card details as they would only supply replacement parts for a self installation if we paid up front. Once any spare part that we purchased in our attempt to fault find was returned to them and tested at the factory as defective ( 4-6 weeks) they would credit us for the faulty part but if the part tested fine we would have to keep it ourselves as a spare. It is not hard to see that if it was as I suspected software problems that I would end up with two complete 4g radar and bg7T setups AND a lot of money later I would be like Henning in the Canaries with two systems that would not work. At this point due to the other issues I had discovered, the fact Navico were not prepared to supply cables FOC (trade cost to them can not be more than $20), and we had been trying for three weeks to solve the problems we took advice from our credit card company and they instructed us to return all items immediately which we did.
Re Navionic v cmap N charts. Before we purchased the bg7t we met the b& G sales rep and spoke at length about our requirements and one of the selling points of the bg7t for us was the fact it would run cmapN charts because Cmap emcompasses the Explorer Chart data for the Bahamas and Wavy line data for the Turks & Caicos and, whilst it is down to personal preference, we have cruised those waters extensively and found Explorer data to be the most accurate and indeed rescued a few that have run aground using other data sources. What the sales rep did not know until I discovered it directly after contacting Jeppeson myself to try and find why a solution to why the CMAp N data was incomplete on my bg7t was that Navico only purchased limited data from CMap and so tidal information not included. There is supposed to be a software update coming sometime in 2014. But for anyone considering purchasing a bg7t that plans to cruise further afield then just be warned that CMap N charts may be incomplete.
Paul, Navico did not “purchase limited data” from Jeppesen. In fact, they didn’t buy any data from Jeppesen; it just doesn’t work that way. The two companies only announced planned chart compatibility a little over a year ago and I don’t think it worked at all until a software update last summer.
I suppose Jeppesen could be clearer about what is not yet included in C-Map Max-N but it’s pretty obvious when you compare the product page to regular Max charts:
http://ww1.jeppesen.com/marine/lightmarine/max-n/
And please note the concluding sentence: “In partnership with Lowrance, Simrad and B&G, we will continue to add new data layers and exclusive navigation features that have made C-MAP the leading choice of boaters worldwide for over 20 years.”
I’m pretty sure that’s true as Navico seems committed to giving its customers as much cartography choice as possible, and certainly Jeppesen wants to sell its products to as many customers as possible.
We suggested to Navico technical that as an easy quick verifiable solution for them to see there was an adequate 12v supply voltage that we link up with a Skype video call so that I could demonstrate the fault diagnostics that I had done as a qualified EE using professional fluke multimeter showing the 13.5V supply and our Sterling smart regulator monitor which also displayed 13.5V supply but Navico were not interested. I even stripped the connection down to just 2 jump wires direct to the brand new Gel battery bank with all other electrical items on the boat disconnected so that there was no possible electrical interference or conflict. Then ran series of start up tests and same result with no radar high failure rate on both bg7t units we had purchased.
Hi Sparky I asked this question before buying and Navico told me that the external antenna ZG100 was much better and the internal gps would be location sensitive. This proved to be true as the bg7t was installed under a canvas spray dodger ( no heavy metal frame) which in wet conditions we would drop the internal GPS and so I would say that as a minimum the ZG100 external antenna would be necessary. For full on chart radar overlay with MARPA you do need the separate heading sensor which is expensive. With the Garmin 741XS / radar with the internal antenna we have had reliable radar chart overlay in sun, cloud and rain conditions under the spray dodger and so far we are happy with the accuracy but only time will tell.
Yes I agree Ben that it should be highlighted at the outset better as when I purchased the software from NAVICO themselves (not Jeppeson ) and it was marketed as the CMAP version made specifically for Navico and hence it was easy to assume it was the full on version. After all b & G zeus 7 is specifically for sailors and in the manual it claims the software incorporates currents and tides in calculation of laylines etc which is an exaggerated claim if the tides are not included in the cartography. When we queried the missing tidal information Navico technical were simply unaware and denied it was not included . Only after Navico support referred to the Navico cartography department R &D did they confirm what I had already found out.
I would also raise my concerns that Navico keep pushing new products onto the market and with the launch imminent for B & G Zeus 2 I would question whether Zeus Touch is going to get any support for those unfortunates that are quite clearly still having problems with the bg zeus touch units. At least by this post I do know that others are in the same situation as Navico constantly denied to me that they had received any other complaints with similar symptons to our experience.
Paul, you bought a Jeppesen product through the Navico Insight store and I think the store is quite clear about who created the product:
https://insightstore.navico.com/site/insight_charts/9
And why would you assume that Jeppesen C-Map Max-N was the same as C-Map Max? If it was, why would they change the name?
You’re also confused about the current data used in Zeus. It’s not based on the predictions that come with a cartography package; it’s a realtime calculation that compares your boat’s speed and course over the bottom with its heading and speed through the water (if you have accurate enough sensors to support it).
Also please note that Henning is apparently trying to run his radar through a conventional Ethernet switch/router. To my knowledge no radar/MFD manufacturer supports that kind of install, though Navico does publish some advice on how advanced users can make it work.
@ Paul. Yes I would expect the Z7T built in GPS to under perform versus the ZG100. Particularly when the former is below decks and the later above.
Also @ Paul. I feel your frustration, after going through a similar (though on a smaller scale) year long run-around with one of the “big four”.
@ Navico. Snap to it guys and take care of these malfunctioning customers!
Ben: yes, I am “trying” to use Z7T through a standard router, but:
1. during debugging I had connected the Z7T directly to the RI10 with an original Navico yellow ethernet cable (a 1:1 connection with nothing else connected whatsoever through ethernet) and it made no difference with my problem. Still, on average, only 1 out of 5 reboots allowed me to use the radar through the Z7T.
2. My Simrad NSS7 with 3.0 software works completely reliable with my own router or any other setup – 5 out of 5 reboots allow me to use the radar.
3. My Simrad NSS7 had a very similar problem with detecting the radar with software version prior to 2.5. With 2.5 this was nearly completely fixed. I remember exactly one occurrence where I had this error with the NSS7 since installing 2.5.
Sorry you’re having problems, Henning, and wonder if that 1.41 update to your R10 might do the trick. It seems doubtful that every Z7T and 4G out there is working as badly as you describe in #1. It also seems like you’re pushing the envelope a bit trying to mix Zeus with NSS on your own network.
Personally I’m pretty ignorant about all the IP issues that you and Kees have been discussing here, but Kees sure made sense to me with this:
“In our lab at work we also struggle with the momentous diversity of customer environments. There is always someone that has a setup that you haven’t anticipated, or not tested to the hilt, and then something goes wrong. So I am very sympathetic to suppliers that have stuff which shows some niggles in environments that their customers cook up but that are not what they envisaged.”
In retrospect I wish I’d pushed this conversation over to the Forum — it’s wandered far from the entry topic — but I guess I reacted badly to Paul’s claim that he bought a Z7T and 4G based on Panbo reviews. Heck I’ve never used a Z7T, or an NSS7.
At any rate, it does seem that a downside of Zeus’s special sailing software is that it takes Navico quite a while to add it back into a new version of the underlying NSS software. Here’s hoping Zeus Touch 3.0 shows up soon.
@Ben. Here’s hoping Zeus Touch 3 shows up soon? I ‘ll be calling Navico Monday re: sw release plans for the existing touch units.
Good sign regarding Navico software support for older products: on Friday the original Zeus got a lot of new features (and possible fixes) via v2 update:
http://www.bandg.com/en-GB/Products/Zeus-8/Zeus-v2-Software-Update/
I hadn’t realized that the Simrad NSE series also got many of these updates in v4 software last December:
http://www.simrad-yachting.com/en-US/Support/Downloads/NSE-Software-v4/
Just to clarify the bg7t unit with internal gps was mounted in cockpit and not below decks and so it was the canvas on the sun cover that when wet would degrade the functionality of the internal GPS.
Henning, Navico wants to help you out with the radar. I just forwarded an email to the “clarity.de” address I have for you. If you’re using something else please contact me (ben at panbo.com).
Ben: I just replied to Navico (copy you). It’s good to see that Navico monitors Panbo and even takes a first step to resolve the problem.
I will post here any future developments.
“They said that the broadband radar is 100% impacted by pulse radar, and therefore not effective” and “they” are apparently two different reputable electronics dealer/installers. Have any Broadband Radar users had issues that support such a view? Please answer on the Forum: http://goo.gl/3JQobA
Paul,
I told Simrad about the Cmap tide issue back in Nov 2013. I will not buy another Simrad product again. In less than a years time by Nss12 was replaced 3 times,and my GSP25 twice. Installed the unit in MAy 2013 and was not functional until Aug 2013 after they came out with a software update.
I was told by simrad management (not tech support) that the CMAP tides issues would be fixed in March, I am still waiting
Looks like the Zeus Touch and Zeus lines both received software updates a couple days ago – see http://www.bandg.com/en-GB/Products/Zeus-Touch-7/Zeus-Touch-v2-Software-Update/. This includes the Fusion integration I mentioned was lacking in an earlier comment. Just left the boat, so I will not be able to try it for several weeks. Includes several other capabilities that may be of interest to other readers.
A strong word of caution about this new software update:
I have been having problems with my Zeus Touch 7 detecting my Simrad BR24 4G radar via the RI10 interface. The problem was that on startup the Zeus would show “no radar”. When I rebooted the Zeus a number of times, it would eventually detect the radar and give me full use of it.
I also have a Simrad NSS7 on the network but this is not the cause of the problem as the situation is unchanged when the NSS7 is off and disconnected from the Ethernet network.
The NSS7 originally had an identical problem but this went away with 2.5 software.
Navico support told me that the problem is twofold: my RI10 has firmware 1.40 where 1.41 is the latest version. An upgrade to 1.41 is not possible in the field but requires factory service which I have not yet been able to arrange as we are still traveling and need uninterrupted use of the radar. The second problem is in the Zeus software which is not on the same level as the current Simrad NSS software. I was told that fixing either one of the two would solve my problem.
So I was happy to learn onf this update (many thanks to Ken Hamric) but unfortunately, I have a serious problem with it:
1. I have rebooted the Zeus Touch about 20 times so far and have found that on only one occasion it did not detect the radar. On all other occasions, it did detect the radar at least partially (see below). This is a significant change from the previous situation where it would only detect the radar about one out of five reboots.
On one occasion after a reboot I got a mostly black screen with vertical lines near the left and right edges. Touching the screen produced beeps but no other response. After another reboot, it was OK again. During my use so far, I had never seen this problem.
2. I am, however, unable to control the radar from the Zeus Touch at all. At no time with 2.0 software have I been able to set the radar to transmit, power on or power off, increase range or decrease range or change any setting at all
3. On startup, on a radar page, the ZT7 will show the two buttons “Power off” and “Transmit”. Pressing these produces a beep but does nothing. Using the menu from the red power button also has no effect.
4. On the radar page, while the buttons “Power off” and “Transmit” are shown, in the upper left corner where it normally shows the text with the unique radar identifier “Broadband 4G-2557A”, it says instead “No Radar”. This is even so the power off and transmit buttons are shown. This is different from the previous state where “No Radar” was shown in the center of the radar page and the buttons were not shown.
5. When I set the radar to transmit using my Simrad NSS7 with 3.0 software, the Zeus Touch 7 then shows the radar picture. If I change range or settings on the radar using the NSS7, these are reflected on the ZT7. The radar icon in the top bar behaves as expected.
6. I still cannot control the radar in any way from the ZT7.
7. On a radar page of the ZT7, while the radar is transmitting and while the radar picture is shown on the ZT7, in the upper left corner it no longer says “No Radar” but instead “Broadband 4G-557A”. Note that the number “2” is missing in the middle of the string. The radar actually has the identifier 2557A.
8. The behavior described here is exhibited whether or not the NSS7 is powered up. I have done multiple attempts using the ZT7 while the NSS7 was powered off. Not standby but off. There is no change in behavior of the ZT7 whether the NSS7 is on or off except that when the NSS7 is on and used to start the radar, the status of the radar, and depending on the page, the radar picture, is shown on the ZT7.
So, resulting from the upgrade, I have now lost the use of my radar from the Zeus touch where previously I had full use and no problems if, once per boat trip, I rebooted the Zeus Touch enough times to get around the “No Radar” problem, mostly no more than 5 times.
I have no copy of the previous software. The previous version of the software for ZT is no longer available from the website so I cannot downgrade to regain use of my radar from the ZT7.
If there is a reader having the pre-2.0 software file from B&G who could make it available to me in some way, this would be greatly appreciated.
I also suggest that if you buy a new BR24 3G or 4G radar with the RI10 interface, that you check the software version in the RI10 on delivery and demand an update before installation if it is not 1.41. My dealer, JG Tech in Weymouth, UK, checked his stock of 4G radars and found 1.40 software even in units shipped to him 2 weeks prior. So it seems likely that no new radars have been sold with the latest software so far.
I noticed today that there is a new version of the 2.0 software for Zeus Touch (not Zeus squared) posted on http://www.bandg.com/en-GB/Support/Downloads/
The file name is
Zeus_Touch-2.0-46.1.139-28533-r1-Standard-1.upd
where it previously was
Zeus_Touch-2.0-46.1.137-28533-r1-Standard-1.upd
The release date is August 29th.
I have installed it and found it to fix my problem completely. Even though my RI10 still has firmware 1.40, on about 15 reboots, the Zeus Touch always detected the radar and always allowed me to control it. I have tried reboots while the radar is transmitting and all kinds of combinations of actions on my Simrad NSS7 and the Zeus Touch and all is working well.
No. 7 above, display of “Broadband 4G-557A” instead of “Broadband 4G-2557A” still persists but I guess I can live with that.
So I guess I am happy now.
But 4 weeks ago, when we were crossing the English Channel at night from London to Brugge, Belgium, not so. The troubled first 2.0 release of late July has caused me to not have the use of my radar in the cockpit when I had needed it most during our recent travels.
In my personal perspective, based on my professional experience with software development, it seems that Navico fails to follow best practices of a common software base among multiple products. Or has failed with the Zeus Touch product (I cannot speak for the Simrad NSS Evo2 and Zeus squared products). I say so because as good as I can remember, when the B&G Zeus Touch product came to market, the problem that I experienced was already fixed in the Simrad NSS Touch software version 2.5 and also because the Zeus Touch 2.0 software was described to me as also intended to incorporate parallel fixes done for Simrad NSS Touch.
This indicates (but doesn’t prove) that Navico has just forked the entire code for the NSS Touch when the decision was made to start a B&G Zeus Touch line. Then, while B&G developers were busy with B&G features and looks, the Simrad developers were fixing bugs – both in completely separate software products.
In my opinion, the differences in features between the Simrad and B&G products go only slightly beyond what is called a “skin” for the Windows Media Player, for example, where you can change the skin in mid-use without even a restart.
Given the lack of a common code base (as I perceive it – I have no proof), I will probably stay with the Simrad brand in the future as they appear to be the leading team and B&G the lagging team. Also, I consider the first Zeus Touch 2.0 release a good proof of pretty poor product testing.
In addition, I was warned by Navico that support of issues arising out of a mixture of devices from different Navico brands in the same installation would be handled low-priority and on a “we will see what we can do” basis if the issue is related to “Ethernet” as opposed to NMEA2000 (I am not quite sure this line can be drawn reliably in all cases but my radar issue would quite clearly qualify as Ethernet).
I asked but did not get permission to use the exact wording in the email to post here so the above can’t be considered an official Navico statement – just advice for a individual customer.
I also don’t like that Navico is shipping RI10s with outdated software known to cause serious problems and not being field-upgradeable many months after the software has been fixed. If they had significant stock, they could have upgraded that stock in the warehouse before shipment to dealers and customers.
Now, having said all this, I still thank Navico and/or B&G for producing a software upgrade for the Zeus Touch product at a time where a replacement product was already announced or even on the market.
A couple of other facts I noticed:
– B&G has discontinued the NSE product while it is still offered, and has received a software upgrade quite recently, with Simrad.
– The NSE product clearly supports a dual-radar installation which can either be two different radars or the dual-range feature of the 4G radar. The Simrad NSS Evo2 does appear to support it but in a wishy-washy sort phrasing in the user manual. Ben: Do you not have an Evo2 on board and a 4G? Can you test? And the flagship NSO product clearly states that there is *no* support for dual radars and therefore 4G dual range – this is the product most likely to be found on big pleasureboats with multiple radars.
About dual radar-capability of NSO evo2:
A printed brochure “SIMRAD Navigation Solutions for Work Boats” that I picked up on the SMM professional shipping industry fair in Hamburg it says:
“NSO/NSE key features”, “Common Features”, “Incorporate two scanners for dual radar functionality”
There is a new software release for NSO evo2 to implement the HEROiC UI from NSS evo2 on the NSO evo2 which was released on July 28th, 2014. A new version of the operator manual comes with it but this does not mention how to select between multiple radars (the old version didn’t mention this, too). The installation manual is unchanged from the previous software version and on page 19 still says “Reset device ID” , “NSO-II only support one radar on the network.”
Does anyone have factual information?
Also, Ben or others, does NSS evo2 support dual radar or not?
Note that dual radar support is required for the 4G radar dual range feature.
Hi Henning, evo2 definitely does 4G dual range radar, at least one of which can be a chart overlay. I’ve seen it at least on the NSS16 and maybe on the NSS7. BUT choosing which radar — “a” or “b” — is not at all obvious. Sometimes I’ve seen a choice but usually I’ve setup a dual range multi-window screen in a random way. Hopefully Simrad will fix this.
NSS Evo2 supports dual range radar (I have NSS9 Evo2). I can also display one range at my NSS12 (first generation) and the other NSS9 Evo2. In the NSS Evo2 radar installation menu it can be set if “a” or “b” should be the “main radar”.
thanks Henning, with your post I’ve found the fix for the radar problem.
already new installed on our sailboat
– B&G zeus T8
– 4G radar with interface RI10 connected with ethernet cable
also connected with the existing network modules from B&G pilot, wind, depth, speed by NMEA0183
after the installation of the T8 and the radar there was no radar ‘start’ possibility – no reaction.
very strange was the effect, when I have done an initial restart of the T8, I could start the radar! but after a normal power off/on switch, no radar was seen neither to start it.
only a initial restart of the T8 was helpful ….
after upgrading the T8 to 1.139 – all works fine.
conclusion:
I’ve got the new items in september, but no information or hint to upgrade to the newest SW was added neither a hint at the homepage – that’s not very professional.
also the longer phone calls to 3 differnt B&G dealers/certified installer level 2 was not a success.
Re Zeus MFD not recognising 4G radar.
Has anyone found a definitive fix for this?
I have been grappling with “no radar” for 6 months & I am still frustrated. Navico have generously replaced my 4G scanner and then my T12 Zeus display. The problem now, is that some times the Radar is detected immediately on start up, but on other occasions it can take 10 minutes before “No Radar” changes to “Stand by”. Once recognized it works perfectly. I have eliminated cables and interference as being likely causes, I hope. My original T12 was tested at the Navico factory & it failed to recognise their radar also, hence the replacement.
My T12 was replaced in March 2015, I updated the software to version 2. The RI10 has software version 1.4.1, Model 1.0.2.
My conclusion is that the Zeus T12 MFD has a problem in it’s ethernet detection system, but I hope it is something more easily fixed. Not easy taking the MFD to Navico again.
If I am correct, surely Navico must know that this is a problem. I would love to get confirmation directly from Navico. Any one have any suggestions as to how to get to the Navico experts. Australia (& New Zealand) are not aware of this “No Radar” issue from my enquiries.
Thanks
Did you connect the yellow wire in the power lead of the RI10 together with the Red to the + or connected it to the yellow of the power cord of the zeus? (Preferred). If you choose the last option then check that your Zeus is master and has power control.
This also means your RI10 and 4G will only switch on when you switch the radar on at the zeus. Nice power saving feature. Also there is a new software version for the 4G. It must match with the latest software for your Zeus T12. You can upgrade it using the Zeus. Your radar should now work as intended.
yachty 7:
I don’t have access to B&G experts, too, other than the official Navico support center in Germany who are at the moment handling the upgrade of my RI10 from 1.4.0 to 1.4.1.
Can you confirm that you have upgraded with the “Zeus_Touch-2.0-46.1.139-28533-r1-Standard-1.zip” upgrade file and not with “Zeus_Touch-2.0-46.1.137-28533-r1-Standard-1.zip”?
Only the *139* version fixed my problem and it did so even with the 1.4.0 version of the RI10 software (reading about your problems now makes me hope that the problems are not coming back with the 1.4.1 upgrade).
I believe this to be a software problem and no number of hardware replacements will fix the problem.
Please let us know how this develops.
Hi Gerard,
Thanks for your reply. Yes I have all yellow wires connected & my T12 MFD is set as Master, so all devices are controlled by the MFD.
My Radar software version is 4.1.57 (made a mistake in earlier post). Could not find this on B & G zeus web site, but on Simrad website. Simrad lists 4.1.57 as latest 4G radar software version released Dec 2012, so I think I have the latest version.
Unfortunately problem of variable delay of up to 10 minutes after turning on MFD before MFD recognizes the 4G exists persists. (under settings>ethernet, it says “cable unplugged”, but they aren’t & with out touching anything, suddenly the radar is available.)
Hi anonymous,
Yes I upgraded to the latest “139” version, not the 137.
Sorry, hope the problem of “no radar” doesn’t return for you.
I have upgraded the 139 version into two T12’s with the same problem. Have also used a different 4G scanner, same problem. Have bi-passed my ethernet hub (NEP-2) and used different ethernet cables. Only common item is the RI10. I also have WIFI which uses ethernet and when the MFD shows “no radar”, the MFD says “ethernet cable unplugged” and “no MFD ID address” and the WIFI does not work either. This makes me think the problem is in the MFD ethernet board, but….