
Pitufino wifi gateway and NMEA tool kit
Products developed by active cruisers grab my attention. In my experience, products created onboard solve needs and fix issues directly experienced by the creator. Pitufino is no exception. There is no shortage of NMEA 2000 to WiFi gateways in the marketplace. There are also quite a few NMEA 0183 gateways. But few of them are nearly as ambitious, flexible, or offer as many features as the Pitufino gateway.
Pitufino
Pitufino, Spanish for baby smurf, is a small gateway with big ambitions. Pitufino was developed aboard the sailing vessel Pitufa, meaning Smurfette in Spanish, by Christian Feldbauer. So, Pitufa gave life to Pitufino. Pitufino’s tagline, “A real alternative to expensive chart plotters” speaks to the product’s ambitions. At 250 Euros or roughly $270, Pitufino is a very solid value for the money offering capabilities including WiFi Gateway, NMEA 0183 to NMEA 2000 conversion, and a full web interface including sailing, navigation, and engine instruments as well as autopilot control.
The Pitufino gateway is, at its core, a NMEA 2000 and NMEA 0183 WiFi gateway. That means it takes data available on a NMEA 2000 or NMEA 0183 networks and makes it available via TCP or UDP. Most commonly, NMEA data to WiFi gateways are used to connect navigation devices like GPS receivers, depth sensors, and AIS transceivers to navigation software running on tablets, phones, and computers.
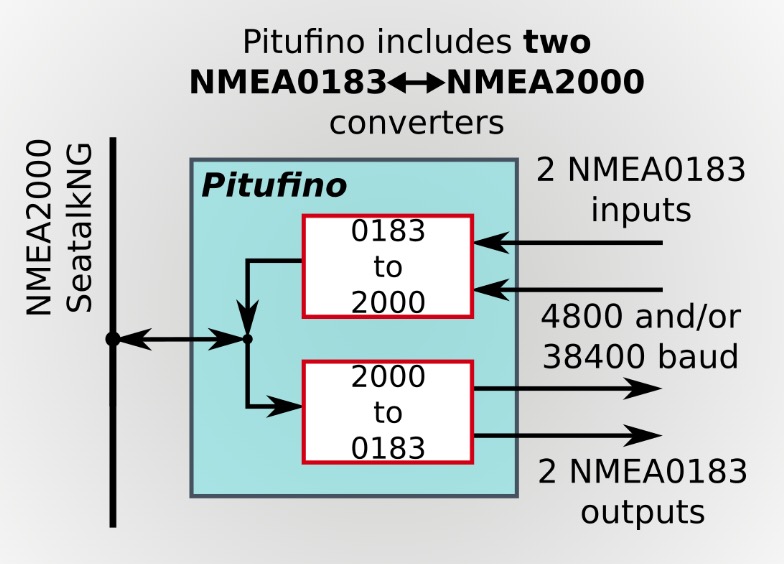
However, unlike most WiFi gateways, the Pitufino has both NMEA 2000 and NMEA 0183 interfaces built in plus an optional SeaTalk 1 interface. Additionally, Pitufino allows granular control of data routing between it’s two NMEA 0183 interfaces, NMEA 2000, and optionally, SeaTalk 1. Perhaps more importantly, the gateway also features a number of web applications providing instrument panels and auto pilot controls. Lastly, sprinkled through the interface the user finds opportunities to correct, tweak, and modify the data Pitufino processes and outputs.
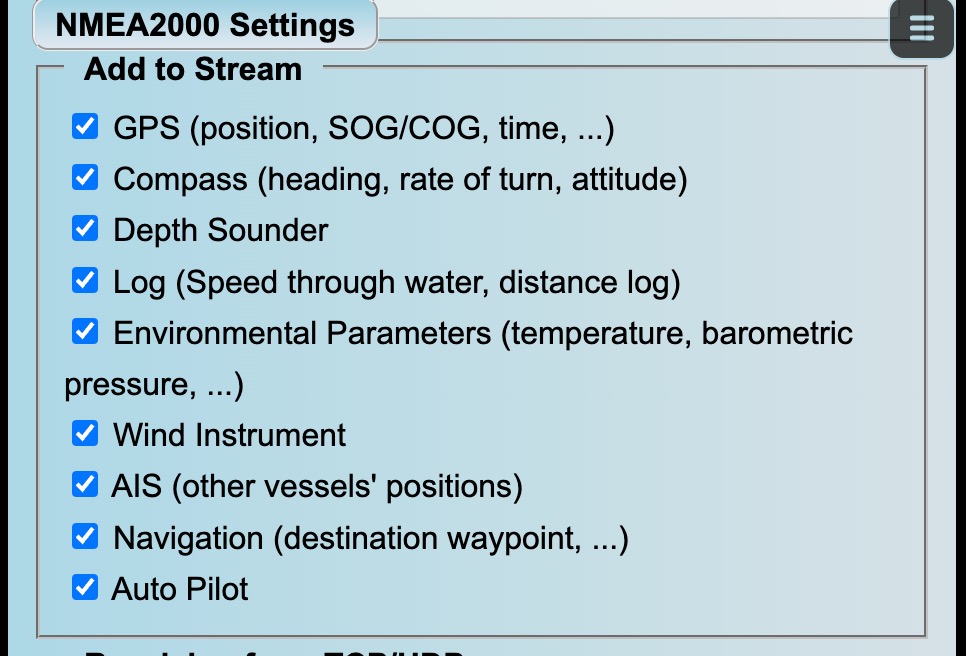
Using Pitufino to output data to a navigation app like Aqua Map or Navionics, it functions like just about any other gateway. During my testing, I succesfully received data in both Aqua Map and Navionics. However, I did have to enable the transmission of individual data types in the NMEA 2000 -> Add to Stream settings.
Physical installation
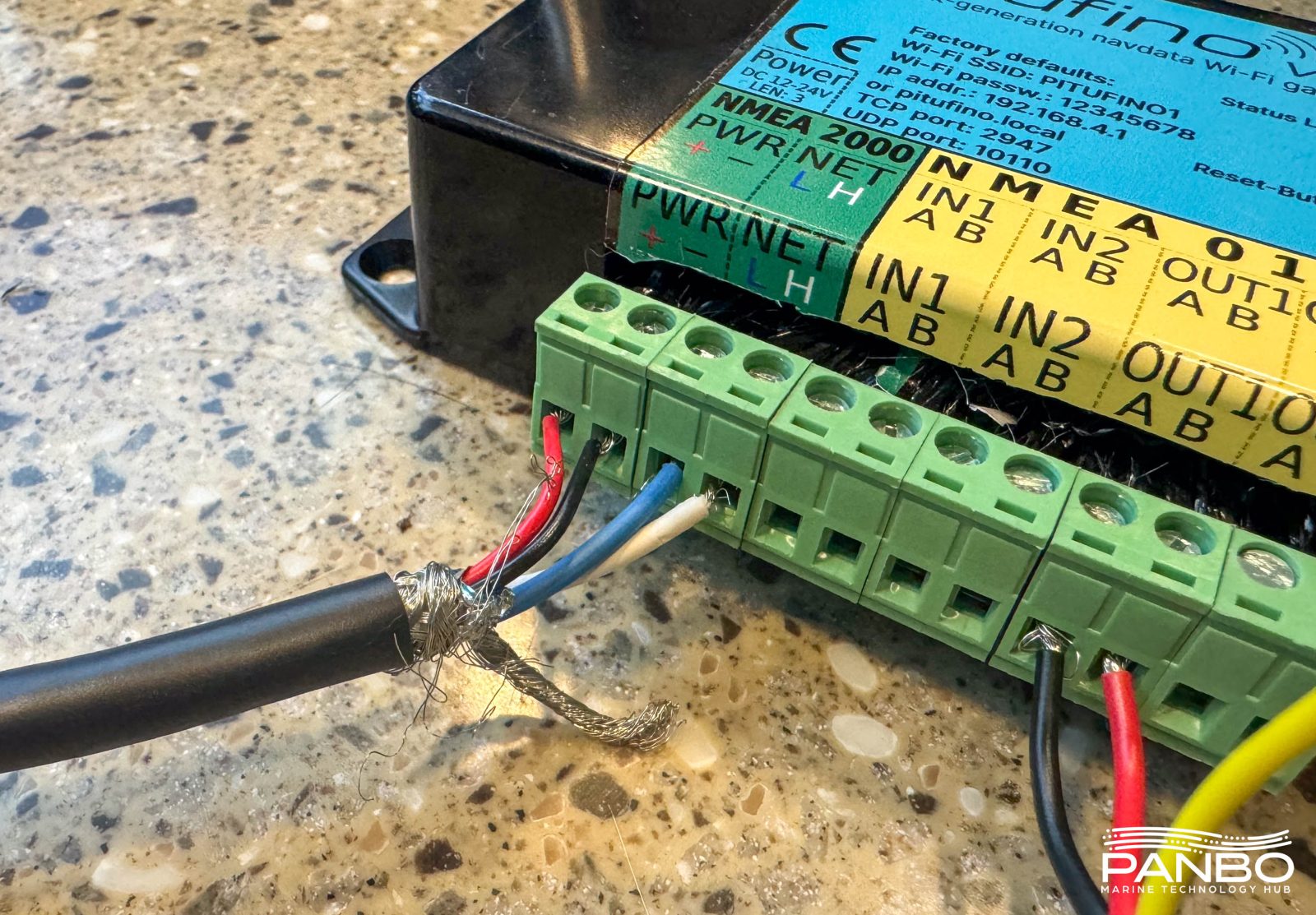
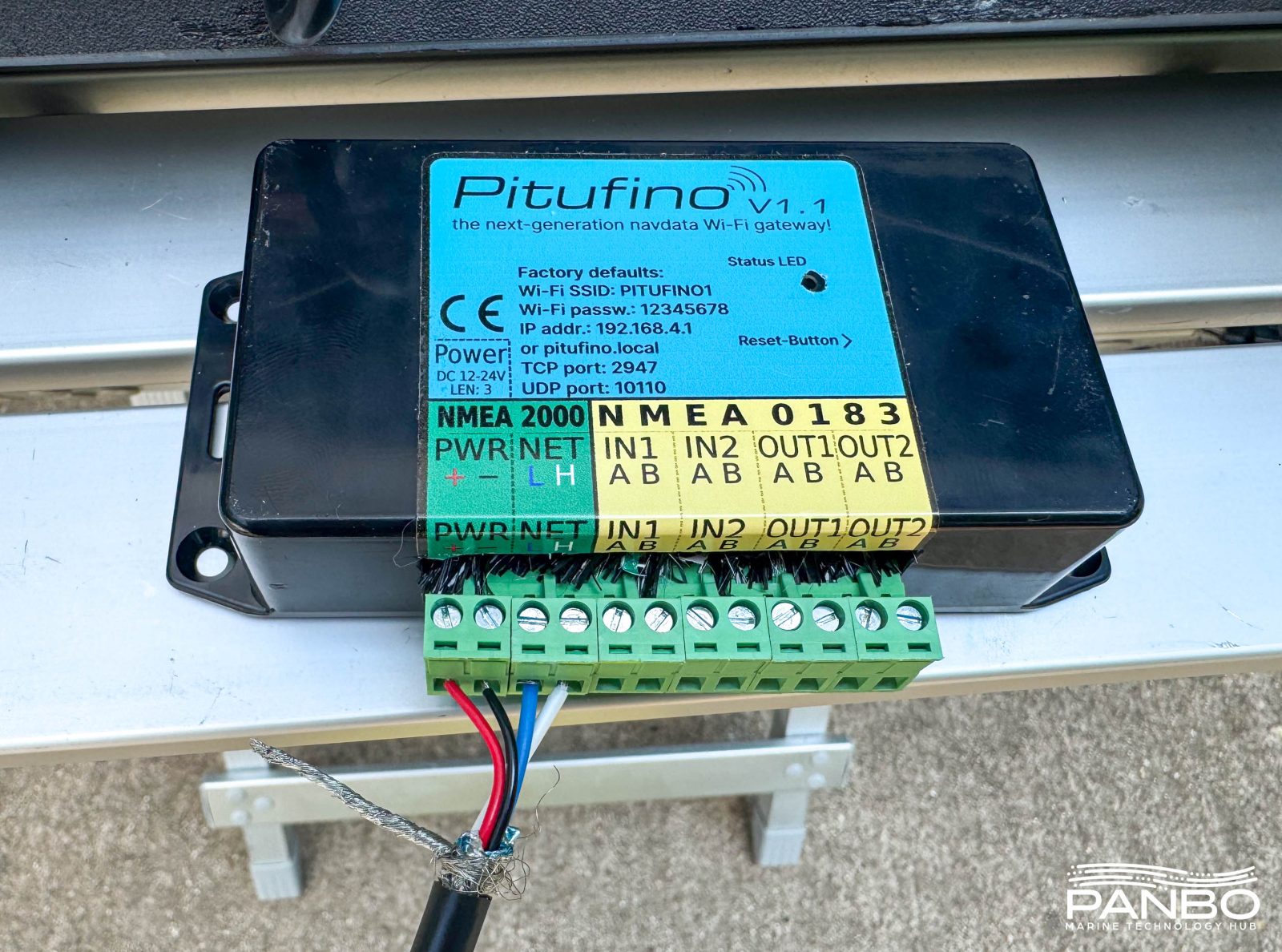
I’m a big fan of the many capabilities Pitufino brings to the table. I’m not a fan of the wiring scheme used for NMEA 2000 connectivity. Rather than providing a DeviceNet connector on the unit, there are four screw terminals on the left end of the device’s strip of connections. To connect it to a NMEA 2000 network, you must either buy a DeviceNet male to bare-wire cable (Pitufino sells them for 20 Euro) or cut a NMEA 2000 spur cable and strip the wires.
I suspect the majority of Pitufinos will be connected to NMEA 2000 and hence would benefit from the simplicity of a built-in DeviceNet connector. However, this connection scheme does offer one important advantage. If the device isn’t connected to NMEA 2000, power is easily supplied by simply connecting 12-volt positive and negative to the two extreme left terminals.
Additional installation steps depend on what other equipment is connected. Pitufino features two NMEA 0183 interfaces, each of which support separate port speed and filter settings. And, if equipped, a SeaTalk 1 interface to connect to Raymarine SeaTalk 1 instruments and autopilots.
Web instruments
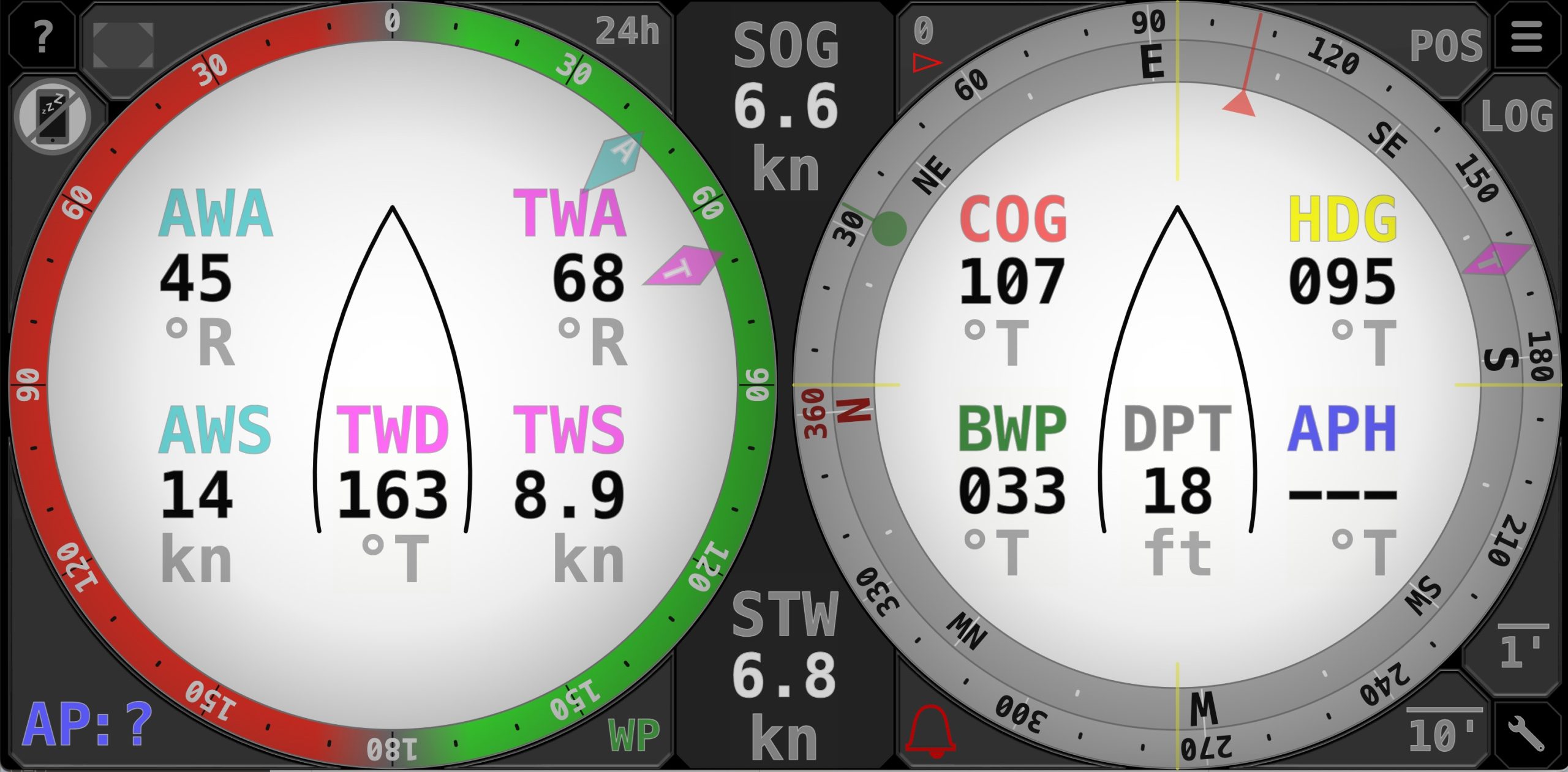
A built-in web server allows any phone, tablet, or computer to serve as an instrument display. The web server displays sailing instruments, an anchor alarm, and two configurable multi displays.

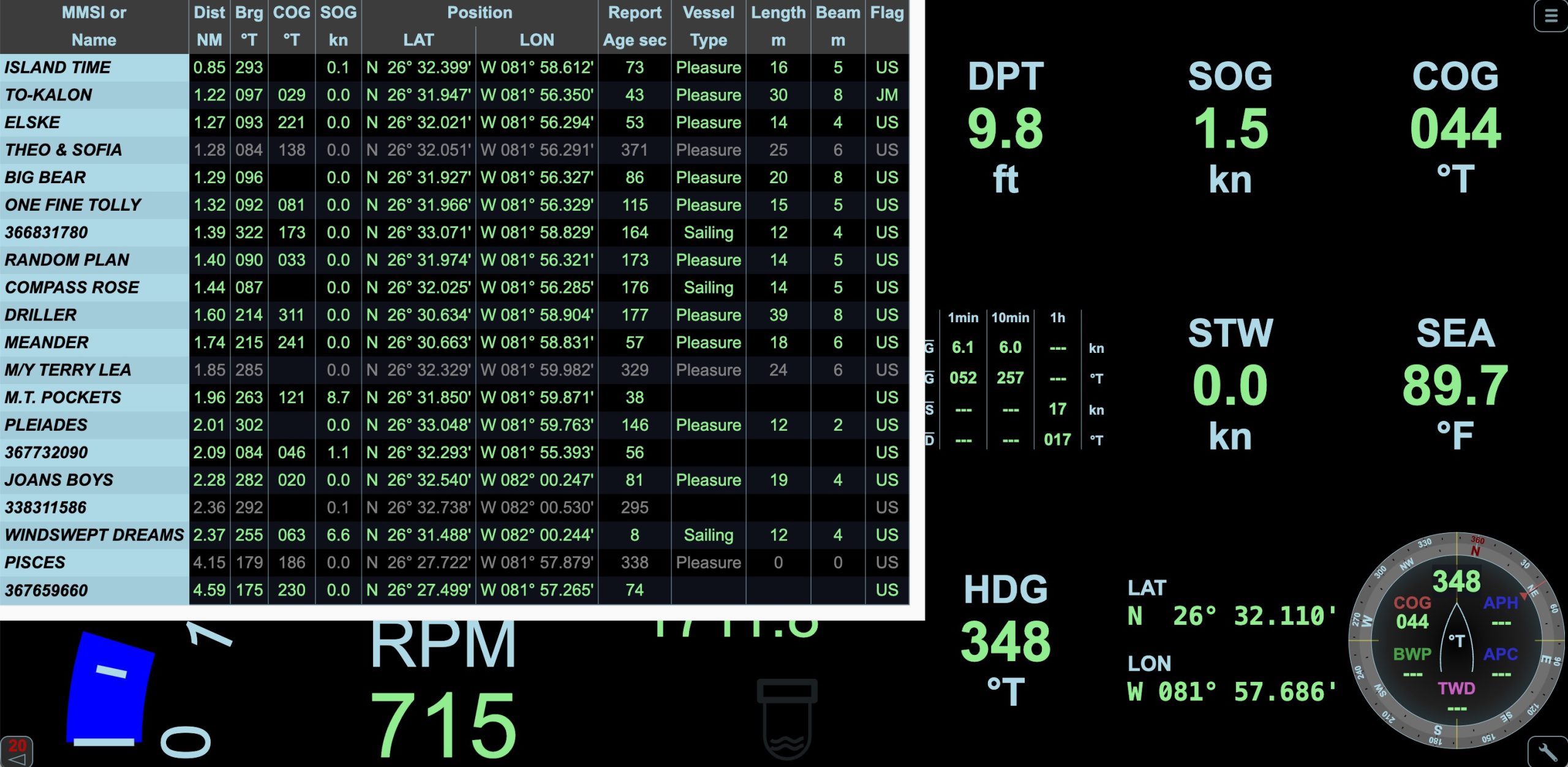
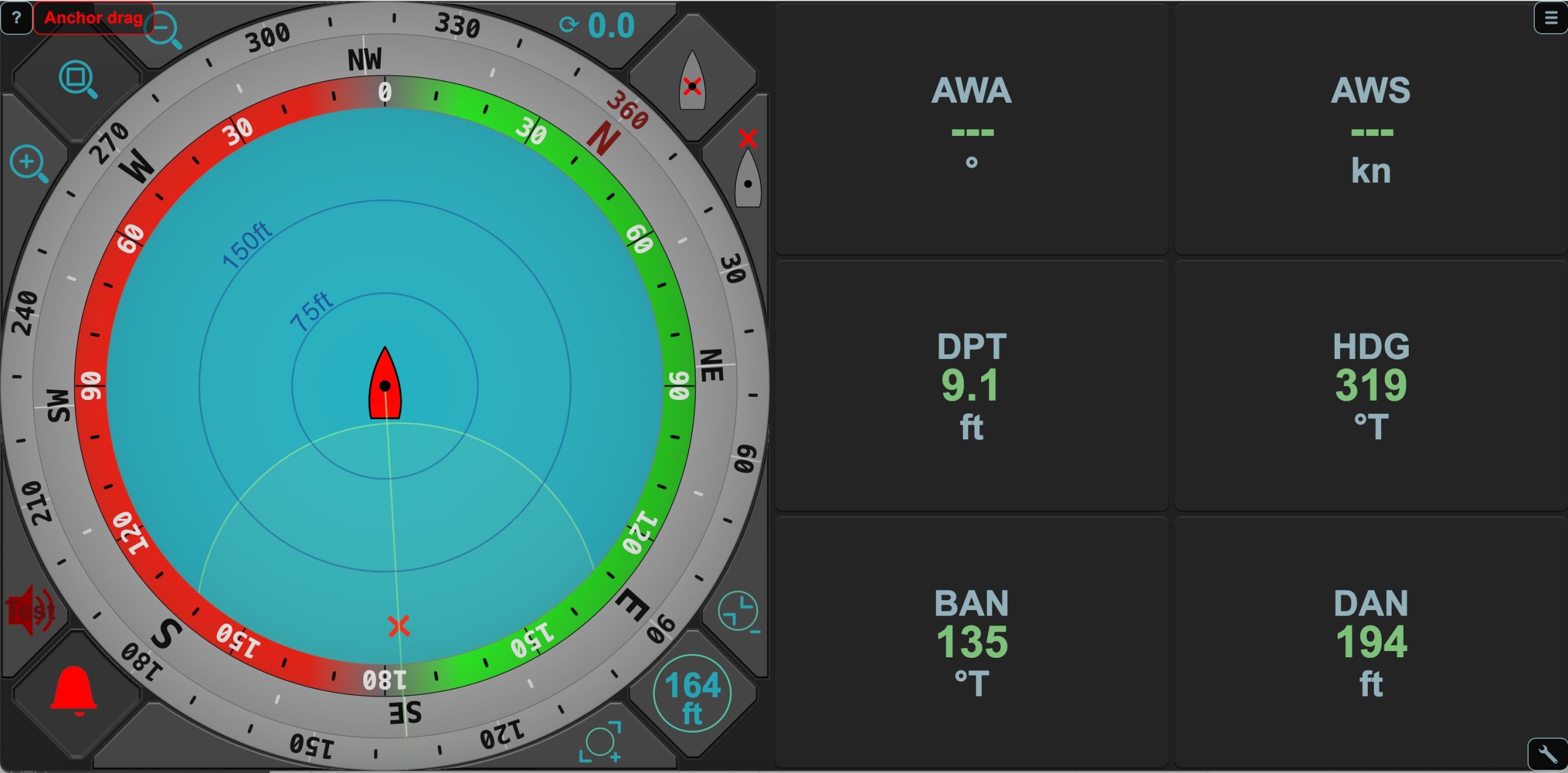
The instruments offered via the web server display data for quite a few different scenarios. Although I’ve used other NMEA 2000 to WiFi gateways with built-in web servers, I haven’t previously seen a gateway with as complete a feature set as Pitufino. Most gateways I’ve seen offer display of real time data but don’t offer features like the anchor alarm, logbook, and value averages.
Creative data calculations and corrections
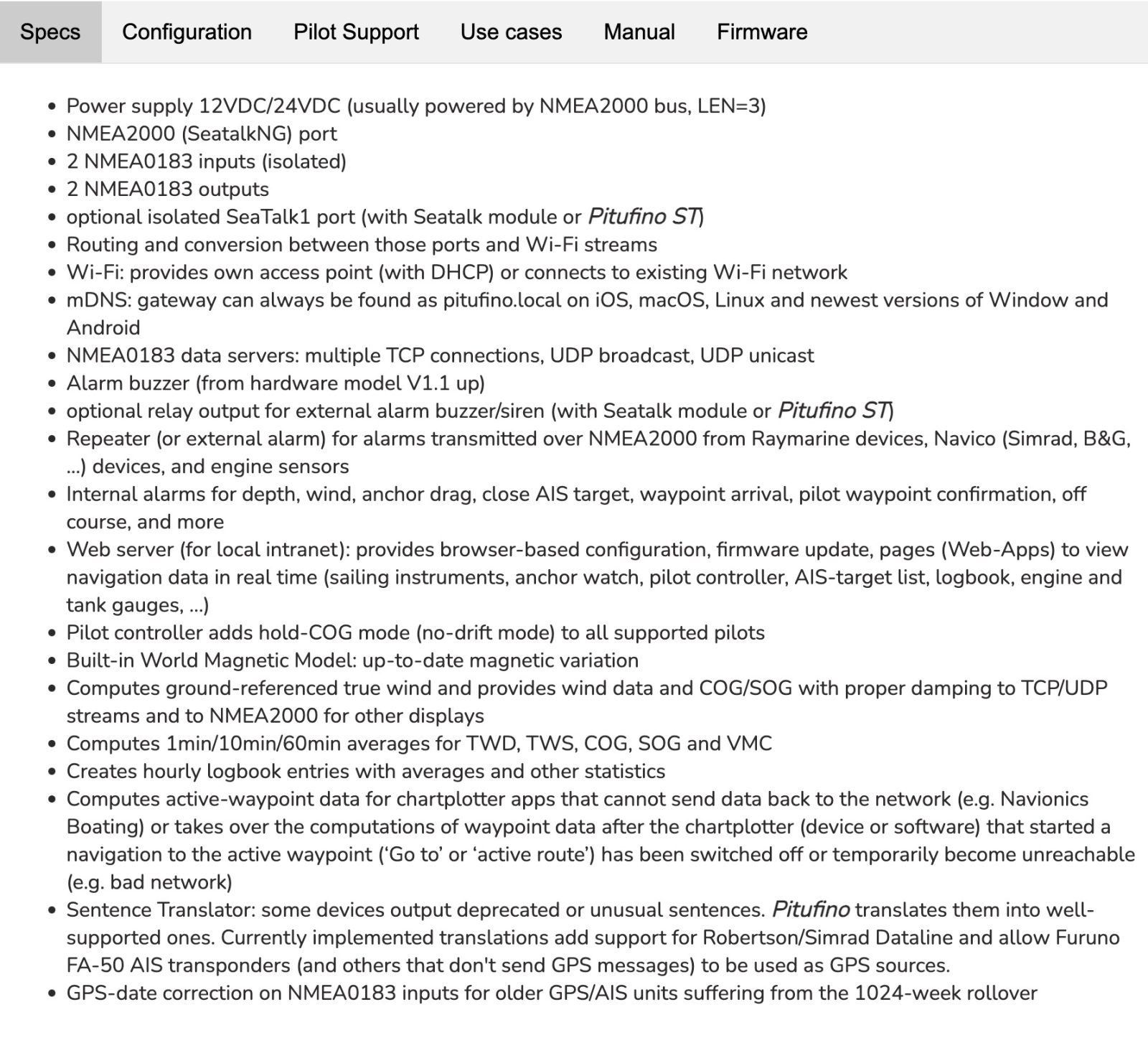
As you can see from the long list of features above, Pitufino has a lot to offer. Many of the top features read a lot like similar products from the Yacht Devices, Quark Electronics, and others. However, as you move down the list, you find a bunch of smart features using Pitiufino’s processing power to modify, correct, translate, and otherwise manipulate the data flowing through it.
Everywhere you look in Pitufino’s settings, there are clever touches to deal with real world problems. The five checkboxes in the “Input Sentence Translation” section all either correct issues or unlock additional capabilities. For example, using position information from an AIS VDO or own vessel sentence to output an RMC or vessel position sentence. The next three checkboxes allow conversion between deprecated sentences and their replacement to offer compatibility between new and old depth sounders and displays as well as wind instruments and displays. Finally, older GPS units that have rolled over their date can still be used by applying a user specified correction.
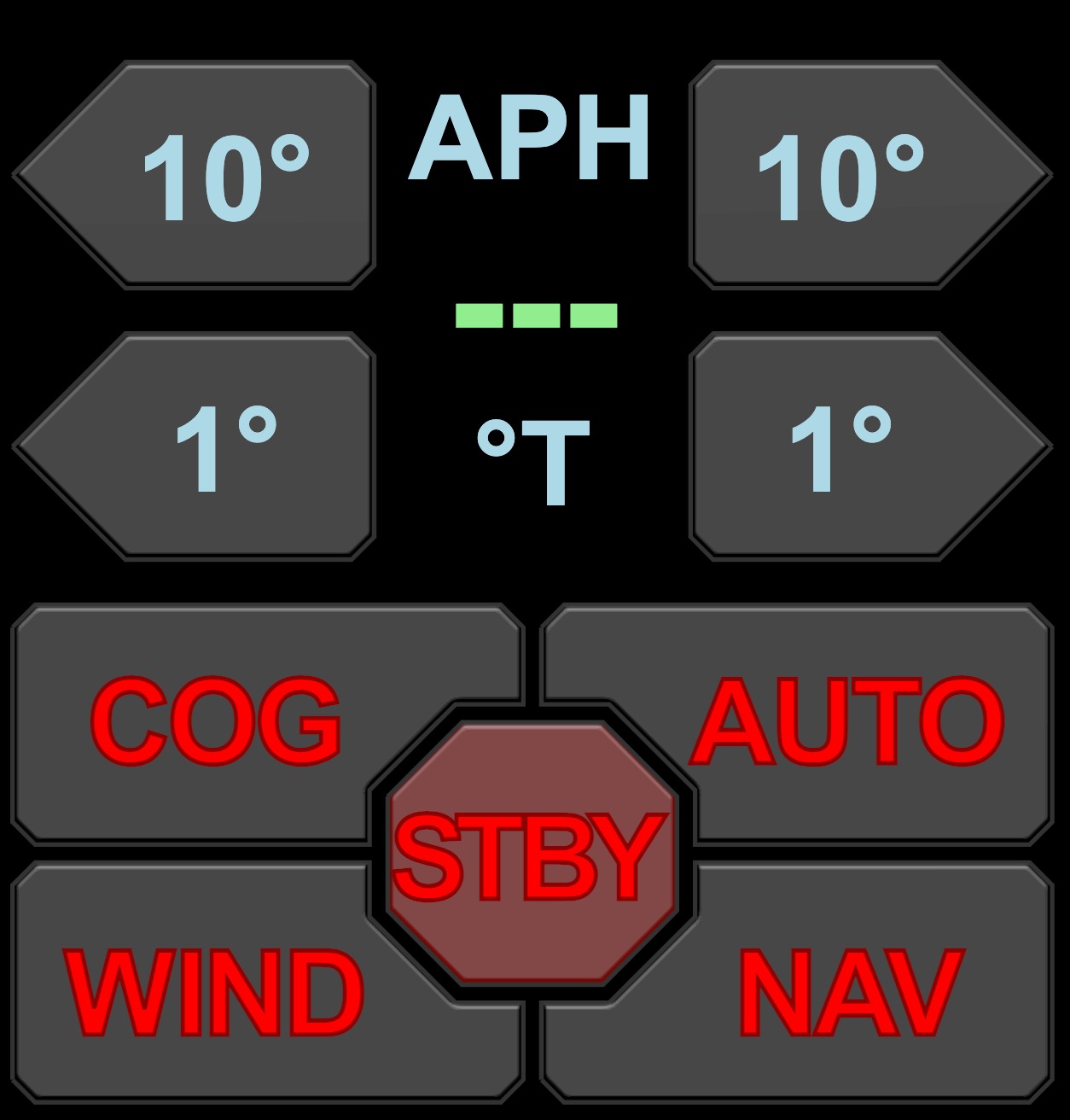
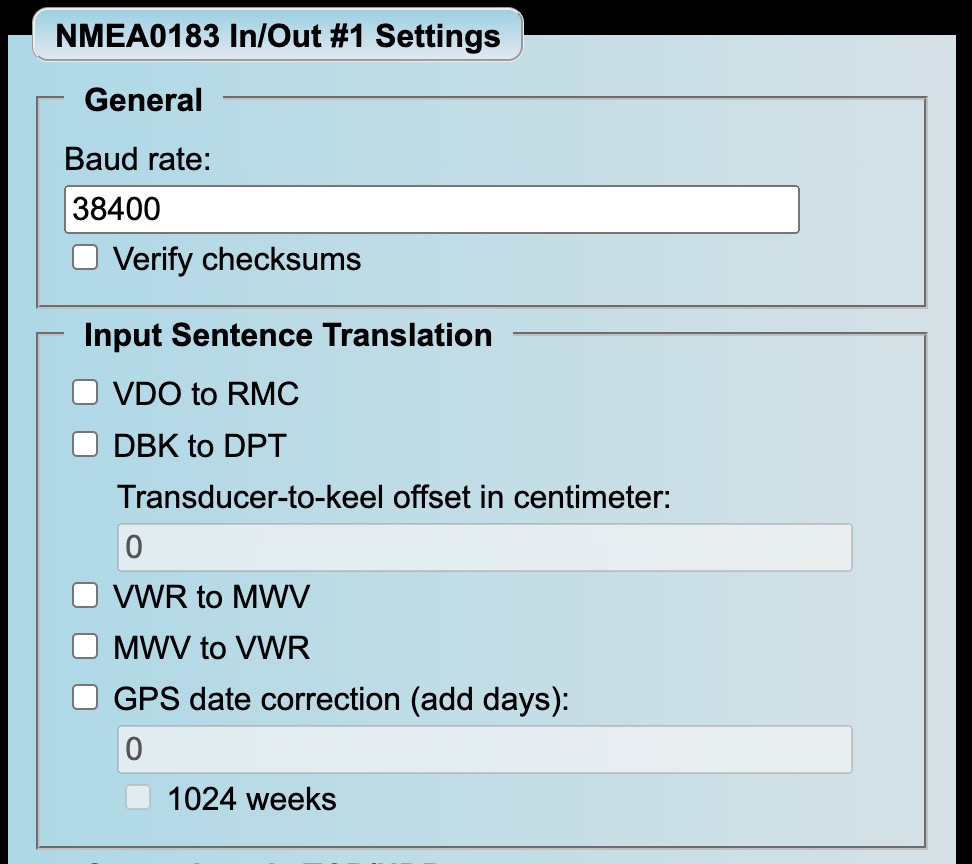
With another creative manipulation of the data, Pitufino adds the ability to manipulate a compatible autopilot’s heading hold mode to instead hold a course over ground (COG). When enabled, Pitufino adjusts the autopilot’s heading to maintain a steady COG. The feature corrects for current and wind that otherwise might push the boat off course, even if the autopilot maintains the requested heading.
Alarms
I’m not sure why, but NMEA 2000 alarms are hard and unevenly supported. To me, there is no reason support should be difficult and limited. Years ago Maretron showed the industry how it should be done. Despite that early example, alarming is still uneven and often poorly supported between brands.
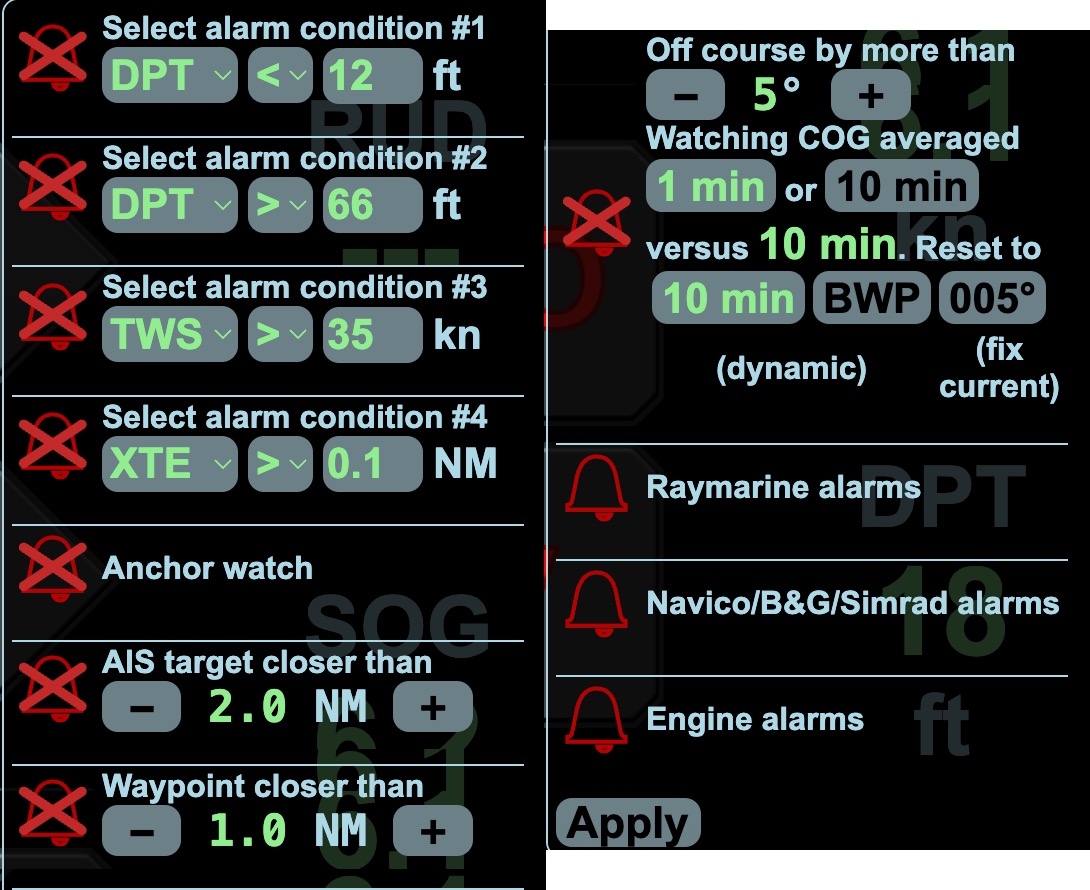
Pitufino makes alarms quite simple. There’s a single consolidated view of all alarms and their status. The list is usually a single vertical list, but I sliced it in half for the screenshot above so it would fit a little better. Pitufino itself has a small speaker built-in. In my testing, I’ve heard it fine, but if the unit were mounted out of the elements and under a helm or inside, it would be hard to hear.

Fortunately, as part of the SeaTalk 1 module, a 35 Euro add-on, Pitufino also supports an alarm relay. That relay can be used to power a strobe, siren, or other alarm enunciator.
Final thoughts
Pitufino isn’t perfect. As I mentioned, I’m not a big fan of the bare wire connection for NMEA 2000 and I think some of the visuals in the web applications could be cleaned up a little. However, Pitufino brings several unique features to a network and provides a toolbox to address many situations and potential issues. So, for a 270 Euro device with as many capabilities as it has, I think it’s safe to say the device is a serious bargain.










The AP control sounds interesting. Maybe we’ll see an OpenCPN plugin that works with this device so we don’t need a webpage to control it.
Regarding webpage I wanted to mention that on mobile browsers such a page can run like a native app once you click “add to homescreen”. That means no address bar, no browser elements, no tabs. That is really convenient in a split screen scenario together with a chart plotter app.
Take a look at the miniplex3 from Shipmodul. A fully supported NMEA 2000/0183 router with WiFi etc.
P.S, I have no interest in the company other than being a very satisfied customer. They are very responsive to suggested enhancements and bug reports.
https://shipmodul.com/products.html
How are the set up instructions? Alas, I am not the network guru I would like to be.
To clarify, TCP, UDP network connections are not my thing. NMEA I’ve got down. In keeping with that, will this work with CanView or other NMEA diagnostic tools?
I’d say there’s a good bit of subjectivity to the quality of the instructions. I think they’re pretty good. But, based on the information you’re after, you might feel differently. You can download the manual at https://pitufino.com/firmware/PitufinoQuickGuide.pdf.
-Ben S.
Two more points:
1 – the unit supports 2 decimal precision on NNEA sentences. To some that might sound like overkill, after all, there’s not much difference in depth between 5,1 ft and 5.0 ft – especially with all the inaccuracies of the measurement process for depth sounding. However, there are rounding errors involved when processsing the native sounder units (for Raymarine ST60 sensors, the native units are to 0.1 feet) through conversion to meters for NMEA and than back to feet for display at the helm – not to mention the application of sounder offset, often in feet. I ran a simulation of rounding errors induced by one decimal precision gateways and they can approach 0.6 feet. Such rounding errors should not be tolerated since they are so easily reduced by a factor of 10 with two decimal precision in the gateway.
2 – the Raymarine SeaTalk1 to SeaTalkng converter option by Pitufino gives two decimal precision. The converter sold by Raymarine for the same purpose is only one decimal precision. You gain 0.6 ft less max rounding error by using the Pitufino converter vs the Raymarine converter. There is enough error in the depth measurement, why unnecessarily add to the error accumulation? Going through the shallows of the ICW (think 4.5 ft at Isle of Shoals), you want your depth soundings to be as accurate as your depth sensor allows.
Another point on two decimal precision, take a look at your graph of successive depth reading in a gradually changing area. Is your depth graph smoothly changing or do you see a sawtooth waveform, with jumps in depths such as 5.0 to 5,4 to 5.0? One decimal precision in a gateway will produce a sawtooth plot – which is frustrating for me when I’m trying to follow the changing shoaling conditions on the ICW from successive passings of otherwise calibrated sounders on my Bob423 Surveyors.
Ideally, you should see your smallest depths change in steps equal to your sounder’s resolution. If not, your gateway is getting in the way of accurate output.
This looks to be a cool little device with so many features and great to see coming from cruisers. I’m a fan of an always-on anchor watch. The manual doesn’t say but it might be even better if it provides position filtering and hysteresis to prevent false alarms. I also like that you can offset the position to the bow since that makes an anchor watch much more accurate as the boat swings. But I think you might have to set it manually every time. If so, a suggestion is it can be done automatically using pre-configured distances from the GPS antenna to the side and bow of the boat combined with heading. I agree with you Ben regarding the N2K connection and in general I’m not too keen on external wiring blocks. But a minor nit for an otherwise nice product.
Isn’t that exactly what Vesper Marine’s Watchmate AIS did (anchor watch using pre-configured distances from sides and bow). Hang on …..
ps: I got mine for AIS but absolutely loved the anchor watch feature.
Very reliable, low power consumption and a ton of useful features. We had a different NMEA – WiFi gateway before and switched to Pitufino about three years ago. It’s running 24/7, we use it on our main Nav Laptop and on android phones for anchor alarm and backup. The main chart plotter gets hardly turned on anymore.
After two pacific crossings and full time cruising in between I can only say that I’m highly satisfied with that clever little device. The software support is great with countless solutions to real world problems. New features and updates are provided regularly. The hardware seems solid and reliable (I’m no expert there but so far it hasn’t let us down). The cable connectors work well for us, our NMEA 2000 network is SeatalkNG so a DeviceNet connector wouldn’t help.
All in all highly recommended, we love our Pitufino.
Impressive. How about he ability to configure sensors, without purchasing the MFD or instrument display from a manufacturer? For example program Maretron fluid pressure sensor, to show correct fuel remaining in a tank, without needing to purchase a Maretron display?
Actually, I thought about that already. Maybe I can fit this into an upcoming firmware version 🙂
I’ve been cruising full-time for 19 years with over 65,000NM throughout the Pacific and have gone through a number of different products for multiplexing and sharing NMEA data. The Pitufino is by far the best I’ve ever used. It might take a bit of time to set up, but so does any system that does as much as this does. Taking the time to read the manual and go through the settings is well-worth it. What stands our more than anything is the web-based interface. The more I use the instruments, the MORE I use them. The customization is unparalleled. Even after over 2 years of full-time use, I find new features that are just awesome. The autopilot control is excellent and the new COG feature steers better than B&Gs built-in No Drift setting. I can’t say enough about how the design principles of this product align with what a bluewater cruiser needs. Bravo!