
Furuno FLS, the hope lives on
One enterprising, if anonymous, Panbot has apparently been searching out filings at the U.S. Patent Office, and discovered some interesting recent activity regarding Furuno Electric Co. and Forward Looking Sonar (FLS). You may recall that Furuno previewed the “FL-7000” at the NMEA Conference in 2005, but then scrapped the product, purportedly due to inconsistent performance. That entry and its comments demonstrate well my personal enthusiasm for improved FLS and the current state of the technology (valuable but limited, with ongoing incremental improvements). Well, patents are hard to read, and don’t necessarily mean much, but…
Maybe some of you engineer types out there are willing to look over U.S. Patent 7369459, awarded in May, and explain to the rest of us what dual beam advances are being claimed here. While anyone may notice that this patent was filed in 2005 and conclude that it’s meaningless, also check out Patent 7463553, another Furuno FLS-related claim (on distinguishing bubbles?) which was filed last March and awarded last month. If nothing else, I’ve learned about two patent search engines—Google’s beta and PatentGenius—and spent some time poking about. Darned if I didn’t come across an AIS-listening satellite development related to the discussion earlier this week. 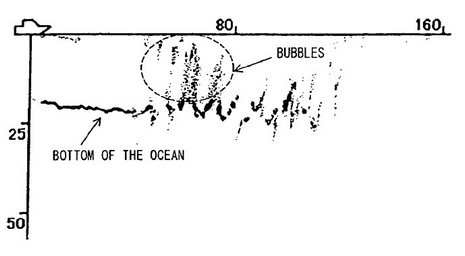








I bet there are several boats in the Vendee ocean race that wish they had effect forward looking sonar.
Multiple boats have hit underwater debris, damaging or destroying keels and rudders, one boat having two such collisions in just 2,000 miles of travel.
Yes, that’s the holy grail of FLS, being able to detect dangerous underwater or just afloat object even in rough conditions, and doing it far enough away that a vessel can take action, even if going fast.
As far as I know, current FLS isn’t even close to this goal, with the possible exception of FarSounder, which is geared toward large vessels:
http://www.farsounder.com/
I just got an e-mail this morning from FarSounder offering onboard customer Demo Days in April. I am going to see if my schedule will allow me to go out and see how well it works in real life.
Gram (aka ibsailn), I hope you can make the demo, and that you tell us about here or on your blog, or both.
Meanwhile, it turns out Furuno applied for another FLS-related patent last March. I really hope they’re on to something:
http://www.google.com/patents?id=kkiuAAAAEBAJ
Ben,
This looks similar to the Interphase Technologies Inc. forward looking phased array sonar that have been available since the early nineties. The difference might be the two banks of transducer arrays, but I wonder if that will overcome the problem of FLS generally not being of much value in shallow water. For example I have heard that forward detection range is typically one fifth of the water depth. So in the Chesapeake Bay with an average depth of 27 ft., your FLS range would only be around five feet or so.
Bill, you have the ratio inverted. The rule of thumb is that FLS maximum range is about five times water depth. Farsounder claims to break that barrier and I hope others can too.
I recently met a boater who raved about his FLS and claimed it saved him from an uncharted reef and a sandbar on two occasions. I have been looking at the Interphase unit (iscan V90)and they don’t seem excessively priced since I am wanting to install a back-up depth sounder anyway.
I normally cruise at displacement speeds in relatively calm waters in a 57′ motor yacht: Do any readers have any practical experience with this type of application?
“the holy grail of FLS” is a good choice of words — we want to find it, but we probably won’t. But don’t stop looking!
“The rule of thumb is that FLS maximum range is about five times water depth.” — I haven’t found a theoretical explanation for this yet. Perhaps it’s just from experience. In any case, Farsounder points out this is the limit for determining depth; the limit for detecting something could be further. This is the best explanation I’ve found:
http://www.farsounder.com/files/3D_fls_for_AUV_0.pdf
I looked at the two patents mentioned above. The second one is indeed for solving the bubble problem:
Existence of bubbles in water induces a problem in the forward detection sonar. The bubbles are mainly generated by rotation of propellers of another ship or a motor-driven boat navigating ahead of the ship having the sonar concerned. These bubbles reflect ultrasonic waves transmitted from the forward detection sonar, and particularly when a large amount of bubbles occur at a shallow place, the signal intensity of the echo reflected from a cluster of bubbles increases. […] which causes a user to misidentify the echo based on the bubble cluster as the echo of a breakwater.
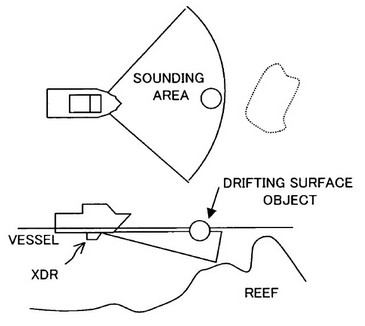
Here’s how I read the first mentioned patent. But first, some background info. A regular sonar or fish-finder just has one element, used for both send and receive, and it measures the distance to a target by time delay, just like an ordinary marine radar. You could aim that transducer forward to make it forward looking, but it would show everything in the beam. If the beam is narrow, you would have an idea of direction but you would only see in that direction.
Farsounder solves this problem by sending out one non-directional ping and then using a 10×10 array of transducers to listen for the echos. This is a phased-array antenna, so they just analyze the signal from 96 channels and determine direction up/down and left/right and distance to each target.
This patent talks about using a linear array of transducers to determine direction from the phase information. They say the prior art is a scanning narrow beam for receive, with the disadvantage that it takes a long time to do the scan. This patent claim is to first use a wide scan to find targets to take a closer look at with a narrow-beam method.
Split-beam in the patent refers to using two halves of a linear phased array to create two directional beams, then using the phase difference between the echo as received by each beam to determine direction. (Like a person with two ears, but very directional ears to avoid noise from other sources.)
Actualy, the echopilot basic systems already achieve at least eight times the depth ahed, and their top of the line models will see between twelve and twenty times the depth ahed in shallow water (down to a meter) where most of the others will not work bellow 3m. I believe they also hold the pattent for the omni directional transmit and then analize the recieve, resulting in real time images being updated at a minimum of twice per second. It is true however that the ultimate maximum range in deep water the echopilots cannot match interphase or farsounder. However in shallow water where you realy need it is vastly better, coupled with the fact that it is the only realtime system on thae market
Here are some links with descriptions and screen shots of how Steve Dashew uses a Furuno CH270 sonar on Wild Horse.
anchoring
http://setsail.com/loch-moidart-sonar-navigation/#more-6429
http://setsail.com/castle-tioram-scotland/#more-6464
http://setsail.com/rainy-day-in-norway-using-sonar-to-find-a-ledge/#more-5489
navigating poorly charted waters or confusing areas
http://setsail.com/navigating-in-confusing-areas/#more-5224
http://setsail.com/s_logs-dashew-dashew544h/#more-2251
http://setsail.com/sonar-navigation-where-it-is-really-tight/#more-5269
http://setsail.com/sonar-navigation-isla-san-francisco/#more-657
sonar and shipping containers
http://setsail.com/submerged-shipping-containers/#more-2329