
Garmin GPS 24xd: inexpensive Heading data to stabilize charts, radar, and AIS

The Garmin GPS 24xd combines a high-performance GNSS receiver with a heading sensor though it only costs $50 more than their GPS 19x GNSS receiver. Thus it can inexpensively stabilize chart and radar views on your MFD while also ensuring that your boat’s AIS target is headed in the right direction even when it’s tied up. I’ve been testing one, successfully, and also investigating why the GPS 24xd is not a good replacement for a more accurate, faster-updating, and likely better located Heading sensor that’s appropriate for autopilots and radar ARPA/MARPA calculations.
The $299 GPS 24xd shares the funnel shape and mounting options of other Garmin GNSS receivers like the $249 GPS 19x. The 24xd can use GPS, Galileo, GLONASS, and BeiDou satellite constellations for high accuracy positioning, and it can output the data up to 10 times per second (10 hertz) over NMEA 2000. I used the included pole mount and a standard 1-inch 14 thread VHF antenna ratchet mount to install it on Panbo(at)’s T-top frame, and complete deck and underdeck mounts also come in the box. So the GPS 24xd is a lot like a familiar GPS receiver except that it also includes a magnetic heading sensor with plus or minus three degrees of precision, which also outputs an N2K data message — known as a parameter group definition, or PGN — at 10 Hz .
Edit 4/23/2021 – When I first wrote this entry I failed to cover the increased accuracy the 24xd offers when compared to any other currently available marine GNSS receiver. The 24xd is more than twice as precise as Garmin’s GPS 19x. Garmin quotes a 50 centimeter spec for 50% circular error probability for the 24xd versus 120 centimeters for the 19x. The additional precision comes from the new L5 GPS frequency. This is a new, more precise GPS frequency that began launching in 2009 but has only recently reached more than 50% coverage in the GPS constellation. Garmin has published a blog about the L5 frequency and the benefits it delivers.
Most small boats I’ve seen don’t have a heading sensor unless there’s an autopilot installed. Instead, the boat’s GPS-derived Course over ground (COG) is used in lieu of its actual Heading. But COG and Heading aren’t always the same. Course over Ground indicates where the boat is going, whereas Heading means where the bow is pointing. If there’s a strong current or wind-induced leeway, COG and Heading can differ substantially. Plus, COG data is only accurate when a boat is moving. At anchor or tied to a dock can not use changing positions to calculate a course direction well, and so the COG output is usually quite random because it’s based on tiny measured movements usually caused by small GPS errors.
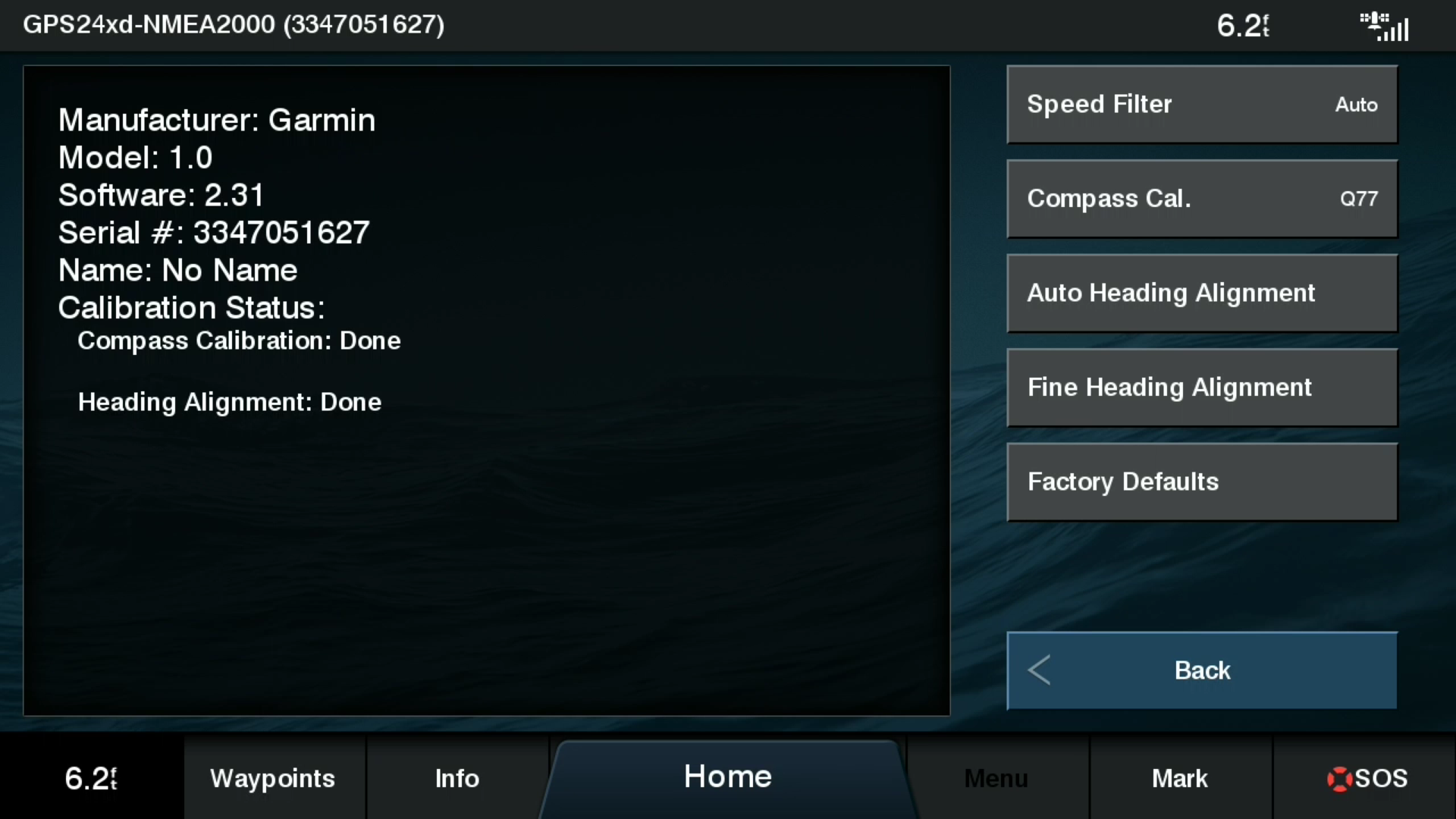
Once the unit is connected to NMEA 2000, you use any Garmin display to calibrate the compass for magnetic deviation at its location on the boat and to align it with the bow, either automatically or with manual fine-tuning. (But much of this can also be done without a Garmin display, as explained below.)

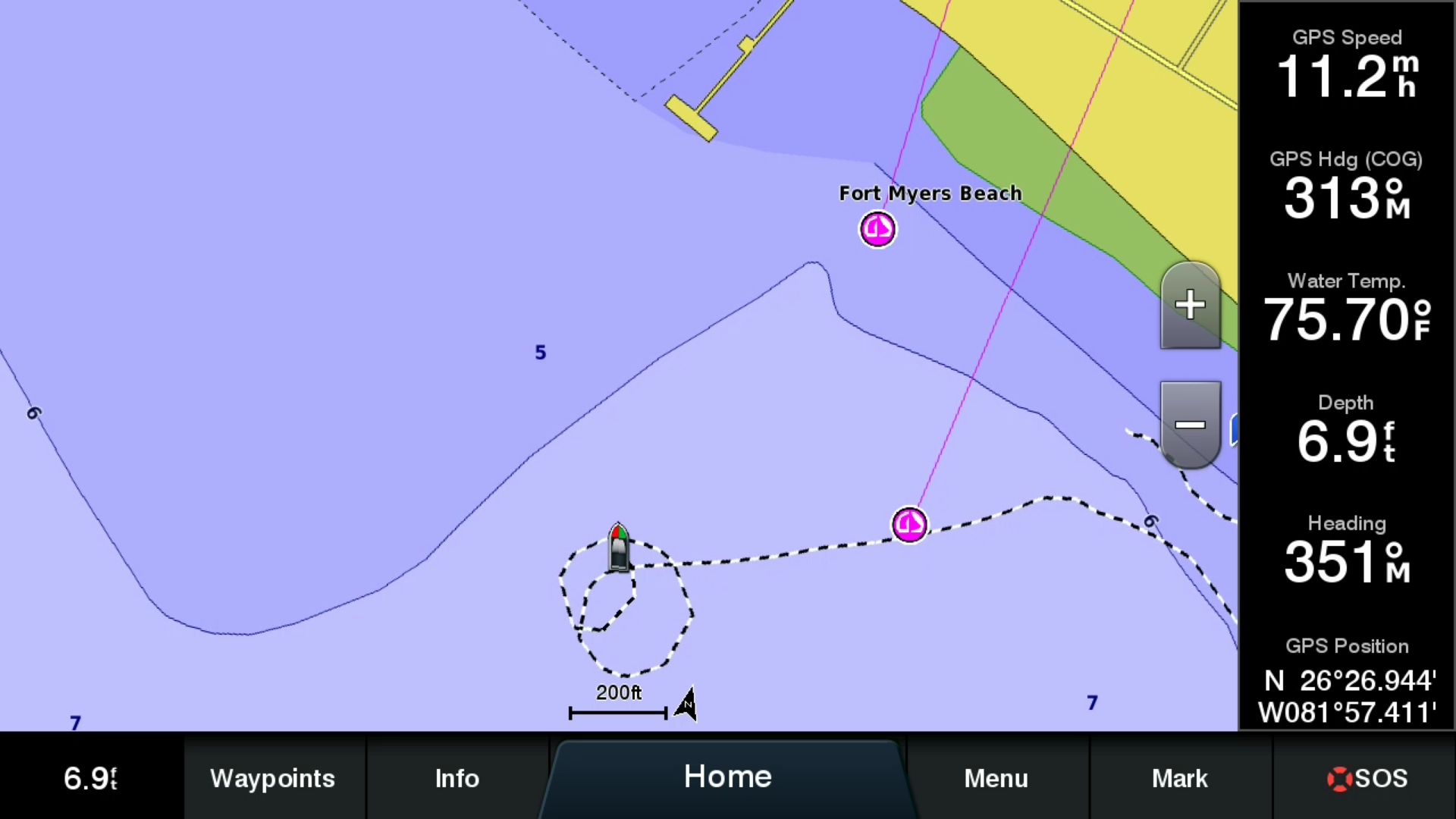
My track after completing a compass calibration
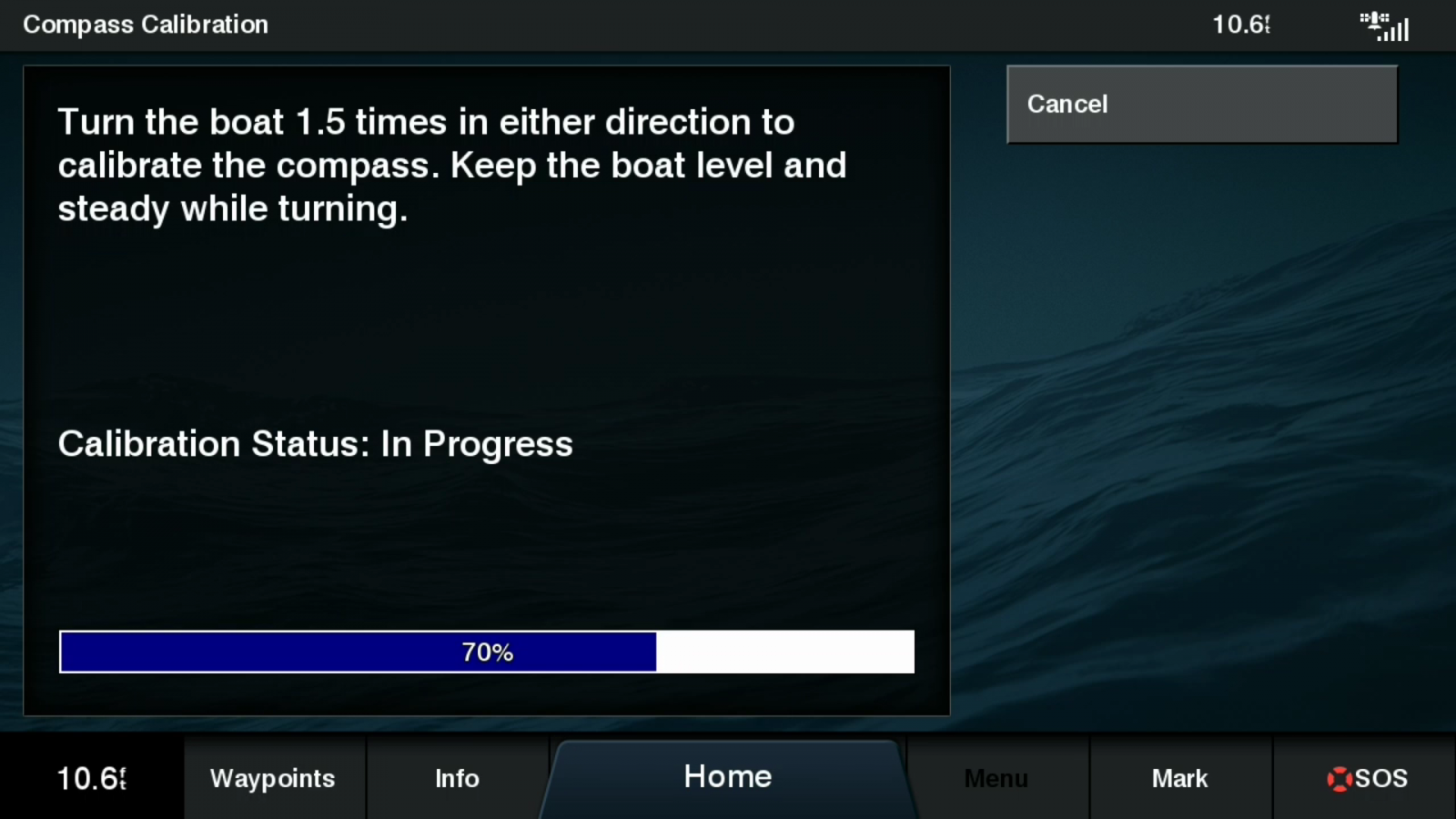
The calibration required turning the boat in a circle one and a half times in either direction. And while the screen instructions don’t specify a target speed, I found through experimentation that I got better results — higher quality scores at the end — by completing the circles at around six knots.
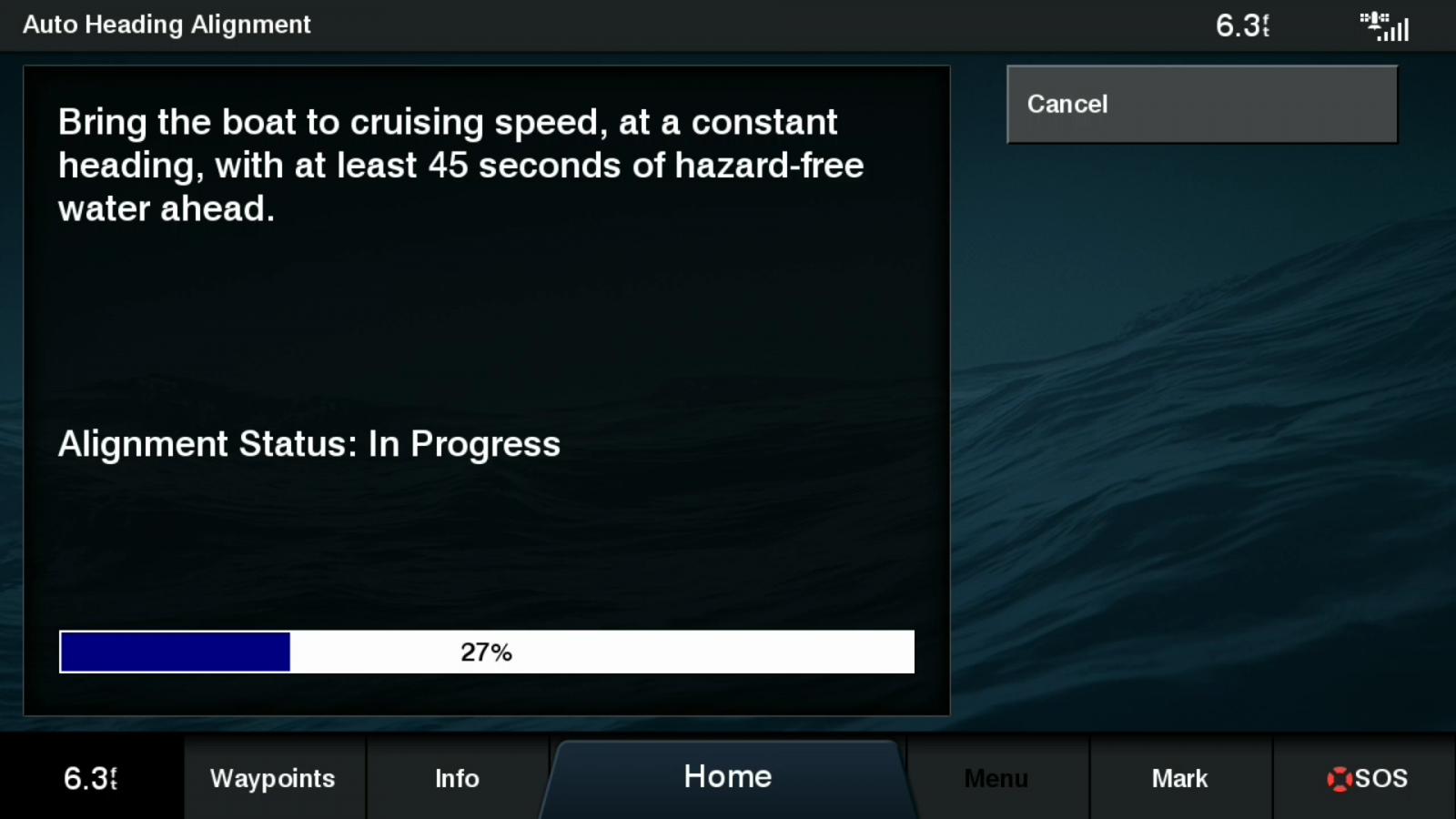
The automatic heading alignment is even easier, only requiring that you cruise in a straight line for 45 seconds. I had a little better results for this at higher speeds, around 20 knots, and that makes sense because the alignment is corrected by comparing Heading to COG. For same reason, all of this calibration should be done when leeway and sideways current set are minimal.
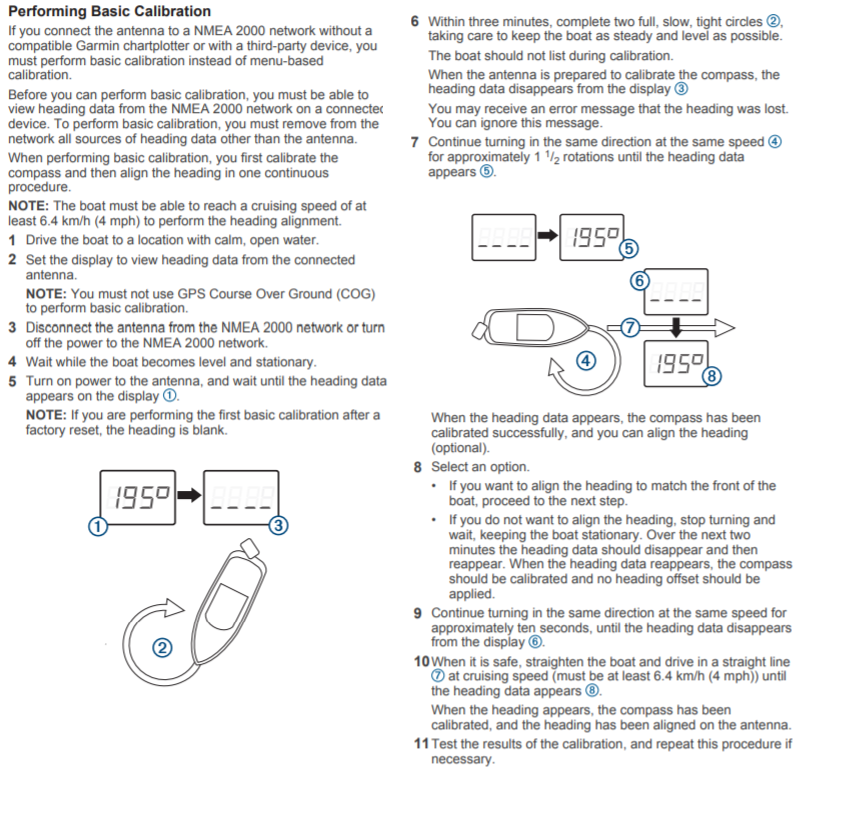
How do you calibrate a GPS 24xd without a Garmin display? You just disconnecting/reconnect its live N2K connection and drive those circles in a specific sequence. The directions don’t look particularly complex but this calibration mode doesn’t include the screen menus, prompts, and status displays that made the process easy for me with a Garmin MFD.
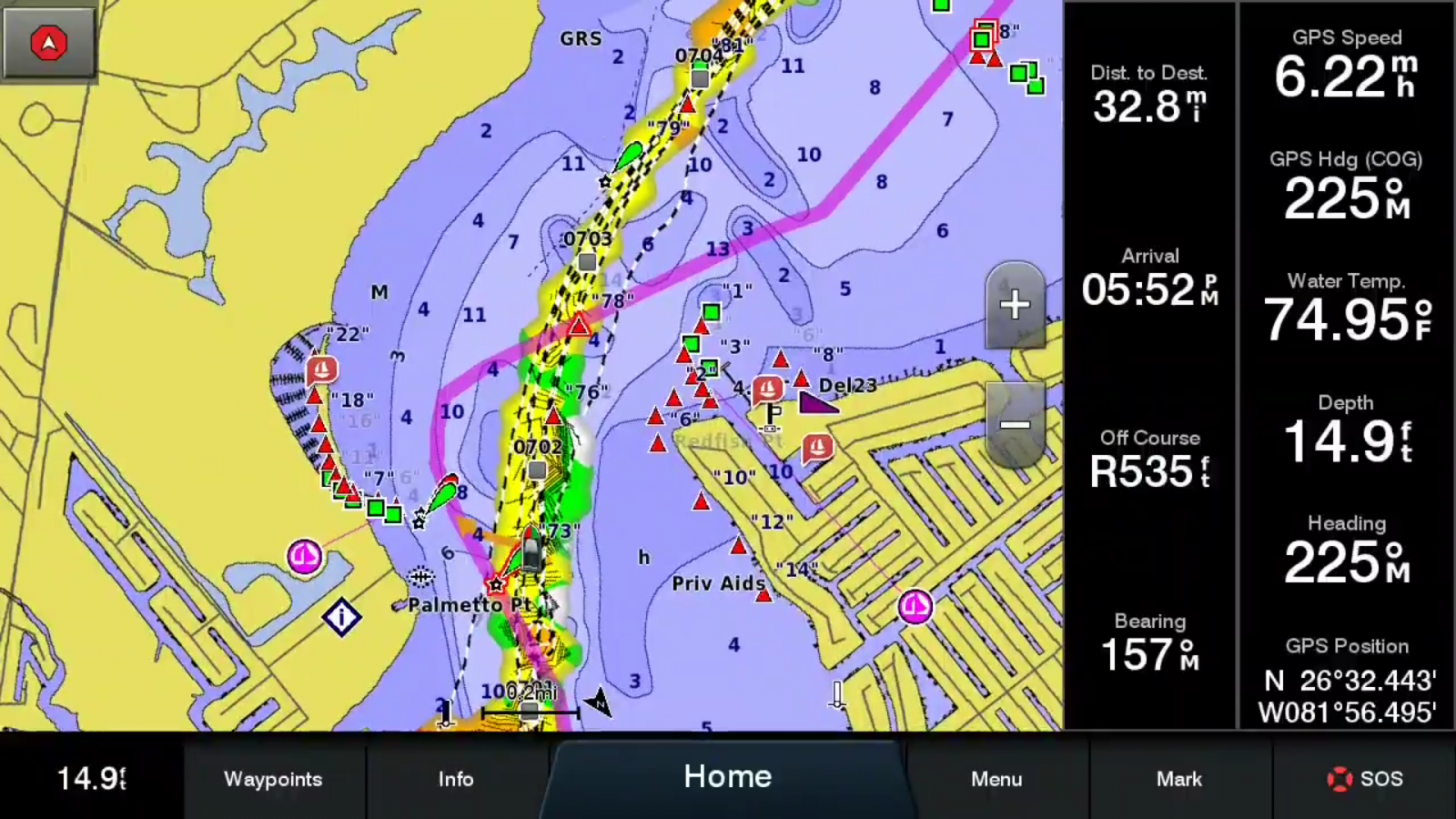
Once I’d successfully calibrated the test 24xd, Panbo(at)‘s Heading numbers started closely agreeing with the helm’s traditional compass. Heading and COG values are also close, except when the boat’s Heading is impacted by wind or current. In those cases, the sensor is accurately reflecting the boat’s actual running conditions and can help the operator understand them.
Garmin’s marketing and press release promote the GPS 24xd’s Heading capabilities for chart and radar display stabilization and also for synchronicity when radar target display is overlaid on electronic charts, but use with an autopilot is not mentioned. The 24xd only outputs vessel heading, not rate of turn or vessel attitude data that I understand autopilots use for smoothing of the data and optimizing performance.
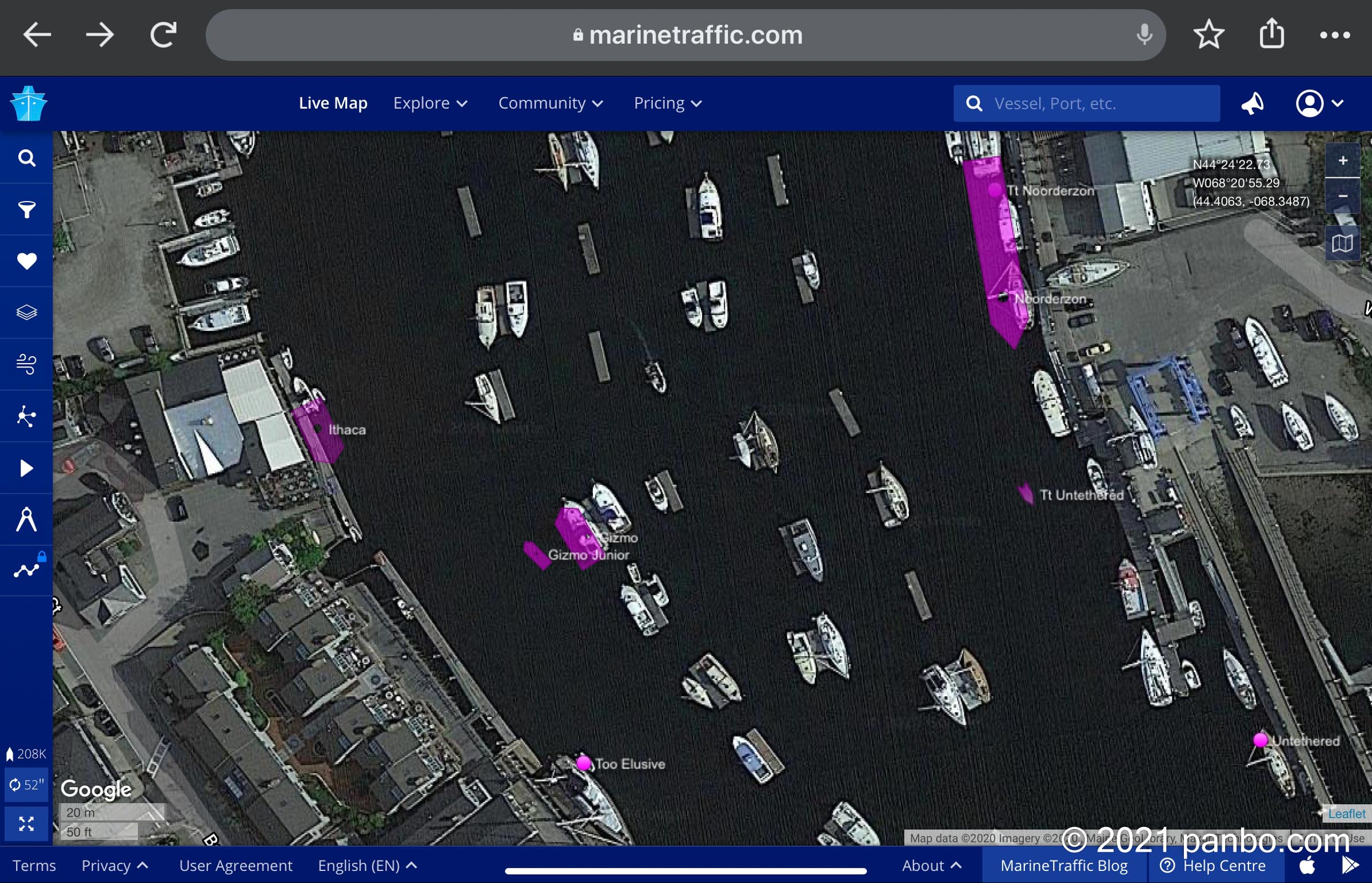
Although the heading data might not be appropriate for more demanding applications it still provides valuable data for chart and radar display, plus it can provide heading data to NMEA 2000 connected AIS transceivers. This data is then incorporated into the AIS message sent by the transceiver and allows AIS display devices to appropriately display the heading of the boat. The Marine Traffic screenshot above shows Gizmo and Gizmo Junior both properly oriented even though they’re not moving, which wouldn’t be possible without Heading data.
In fact, the screen also shows how Marine Traffic no longer tries to indicate a stopped boat’s orientation unless its Heading is available, using a dot-like icon instead. Few chart plotter displays do similar, and the results can be messy, especially when zoomed in enough that the target icons are scaled to the actual length and beam dimensions included in every vessel’s AIS output (relative to the location of its AIS’s GPS antenna).
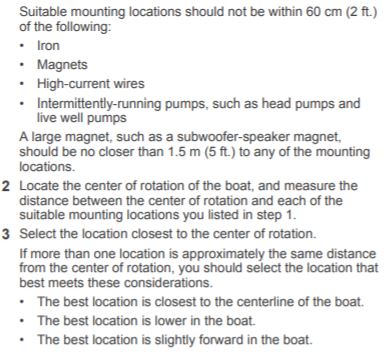
The GPS 24xd is best installed somewhere with a clear sky view for its GPS receiver but the best location for a heading sensor is typically low in the boat and on its centerline. So the optimal install locations compete and the likely result — Panbo(at) an example — is a 24xd mounted high and well off the centerline, which may especially compromise performance for more critical uses like autopilot.
But if you’re in the market for a new GPS (GNSS) receiver, I think that the $50 additional cost for the 24xd Heading output is a no-brainer. Even with higher precision Heading sources on board, I’d feel good knowing I had an inexpensive backup. I also suspect, though I haven’t been able to test it, that the data provided from the 24xd may well be good enough to make autopilots work, albeit with reduced performance.








Ben could you explain in more detail your statement” GPS 24xd is not a good replacement ” for traditional heading sensors ? I just ordered one and hope it will also replace my Airmar heading sensor. The additional location accuracy might also be helpful in some of those tight places we like to go into here in Penobscot Bay. Im hopeful that the data from the new surveys might be incorporated on the new Garmin chips I just acquired . I seem to remember a vessel last summer.
Allan,
With what applications are you planning on using the sensor? In speaking with Garmin they indicate that for an autopilot you’re better off with a more advanced heading sensor. Also, although they press Release mentions MARPA there seems to be some equivocation on that.
-Ben S.
Hi Ben, on the SallyW I have Garmin chart plotter , radar , Airmar heading sensor a Airmar weather sensor , a GPS 19 and a Amec wide link B600 ais. My objective is to keep the system simple and yet keep it as accurate as possible without alerting the wife as to spending. Occasionally the chart plotter waffles as to which heading device it uses even tho I tell it. Plus or minus 3 degrees of heading seems to be quite adequate to me as I now see shifts of the heading line lots more than that. So I figured the GPS24 might stabilize the heading , Marpa and give me better position accuracy. I guess I’ll have to see. Plus I am a slow boat, LNVT at 7 knots. Interested in your thoughts.
I suspect you’re going to be pleased with the results. I’ve reached out to Garmin for a little more context on the MARPA performance with this sensor and once I hear I’ll update you.
-Ben S.
Hi Ben, just wondering if you have any update on MARPA performance of with the 24xd vs more expensive heading sensors?
And I will let you know what I find as well. Spash is May 17.
Allan,
I’m working on another Garmin heading sensor review and was reading through these comments. Any update on how your GPS 24xd is doing for your use?
-Ben S
Hi, Ben,
I just got back from a trip from Marathon to Punta Gorda. I replaced the 19x on Leeway with a 24xd before the trip. I did not calibrate the compass since I have a Garmin Reactor A/P and use the 9-axis heading sensor from that.
Regarding the accuracy of the 24xd, I regularly had accuracy of 2.5 feet or better. I’m very pleased with the performance. If you already have a 19x the swap is about two minutes – unscrew the old and attach the new.
Kevin
Don’t think I am using it properly . When boat is not moving forward the heading is all over the place. When underway it now points more accurately where I am pointing. The position accuracy is really good.
When I first published this entry I failed to mention the increased accuracy the 24xd offers by making use of the new L5 GPS frequency. I added some information about the increased accuracy and the L5 frequency above.
-Ben S.
Thanks for the review, Ben. I’m installing the 24xd on Leeway today. It’s replacing the Vesper AIS GPS antenna. I’ll now have a 19x (that will now be used by the AIS) and a 24xd for my three 12″ Garmin chartplotters. Since I have a Garmin Reactor autopilot with the 9-axis heading sensor on Leeway, I bought the 24xd for the increased accuracy.
Other Ben here, Kevin, wondering how you can replace the Vesper AIS GPS when I think it’s required that all Class B transponders have their own GPS? I believe the Vesper will be able to use the 24xd Heading data coming over NMEA 2000, but would have thought that it’s already doing the same thing with the Reactor Heading sensor data?
Hi, Ben. I’m aware Class B transponders need their own dedicated GPS antenna/source. I am hoping to use the current 19x on Leeway for the AIS and the new 24xd for non-AIS GPS source. Primarily want to replace the Vesper GPS antenna because Vesper has lousy UV inhibitors in their plastic and the antenna has yellowed terribly where the Garmin (and most other plastic on the hardtop) has remained white. In prepping for the swap, I see the Vesper antenna uses an SMA connector, so I either need to find an adapter or just replace the 19x with the 24xd and keep the Vesper.
You’re right about the heading data already on the backbone courtesy of the Reactor sensor. I’m changing to the 24xd because of the better accuracy. I won’t be using the heading data.
Thanks,
Kevin
Kevin, the Vespar is just a GPS antenna for its internal GPS, not a complete GPS receiver like your 19x. You cannot swap those.
Just swapped out the 19x for the 24xd. GPS accuracy improved – now about 4′. I haven’t taken Leeway out to calibrate the heading sensor alignment. Not a big deal since I already have a better heading sensor onboard.
Thank you for the review, Ben. I am in the process of purchasing a 24xd but would like your clarification. My primary desire is for a heading sensor to give me correct heading while at anchor.
I would take any increased accuracy over my current Garmin 7612xsv as a bonus. Is the 24xd typically good enough to give correct heading at anchor? Many thanks! Dennis
Hi Dennis. Showing your boat’s correct Heading at anchor on your plotter and/or on other boats’ AIS screens should work fine even if you can’t quite attain the 24xd’s claimed 3 degree accuracy. I suspect you’ll get more precise GPS info too, as the 24xd uses more GNSS constellations plus the L5 signal that Ben Stein discussed in the entry.
Also — for the benefit of new readers — I was disappointed to see Garmin still confusing customers in their description of your 7612:
“Heading and Position Refreshed 10 Times Per Second
Fast, responsive 10 Hz GPS/GLONASS refreshes your position and heading 10 times each second to make your movement on the screen more fluid.”
Obviously you already understand this, but a single GPS/GNSS receiver can not calculate Heading, just Course Over Ground (COG), which is a very different value and especially so when a boat is not underway. End rant 😉
Thank you!
Muddy waters and terminology, I know, but you’re correct – These days there are multiantenna receivers and what not to confuse the terminology even more.
Also the price point has fallen, its sub 200 eud now:
https://gnss.store/um982-gnss-modules/237-elt0210.html
And technically, you could calculate heading with a single receiver with advanced signal processing, but this would cost you more than a dedicated heading receiver.
Just saying.
I agree with you on the terminology per heading vs COG. That said, many weekend boaters in their target group probably don’t know the difference and might even be confused by COG. Most likely dumbing it down for us common folk. I hate to admit I’m sure I DON’T know much more than I DO know!
Just wanted to update with a performance review. I actually mounted my 24xd just inside the door to my center console and it is totally out of sight. Setup and calibration was very easy. Heading data is excellent, including at anchor. GPS accuracy is always within 2.5 feet. Thrilled with the results this inexpensive device offers!
Interesting choice for the second frequency, L5 that is.
Most consumer grade dual frequency receivers have been L1 + L2 so far. A bit better availability for L2 signal, but I guess Garmin sees L5 more suitable for aviation purposes, and the availability will be there, just a few years behind L2.
Still waiting for the first triband receiver for a reasonable price!
Satellite compass from Garmin .
https://buy.garmin.com/en-US/US/p/702588
First consumer grade multi-frequency multi-constellation GNSS-compass on market? Interesting.
Just to remind, there is always the DIY option for rather lower price for the adventurous, also dual frequency multi-constellation:
https://www.ardusimple.com/product/simplertk2b-heading-basic-starter-kit-ip67/
How does this compare to the Furuno SCX-20 Satellite Compass?
It doesn’t compare. The SCX-20 blows it out of the water and are like apples and oranges.
In particular, the 4 antennas on the scx20 are a game changer for eliminating multipath errors.
At almost five times the cost of the 24xd, I would hope it performs better.
Ublox dual channel RTK heading kit is available for 400 eur / 500 usd range. That is hard price to beat, and even harder performance to better.
Of course involves some DIY:
https://www.ardusimple.com/wp-content/uploads/2019/07/simpleRTK2Bheading-Basic-Starter-Kit-IP67_.png
How is the difference in practise? Have you tried them side by side?
I do not buy four single channel receivers being much better than two dual channel ones, especially with such a short baseline.
I am using two dual channel ublox F9 receivers and they work like charm, but I’ve extended the baseline to few meters, much better sensitivity and substantially more stable RTK baseline heading.
Andy,
You ask some good questions. I’m putting together a test of the Furuno SCX-20, Garmin MSC10, and Simrad HS60. I’m going to test them side-by-side.
I’m working to figure out the best way to really compare their performance. So far, the best that has been suggested by the manufacturers is to use radar trails as an indicator of the job being done by the compasses.
I think radar trails will show the real-world performance of the compasses well and may reveal some differences in the performance. But, I fear the performance of all three products may well be good enough that it will be tough to detect the superiority of one versus another.
So, if anyone has any suggestions for additional tests, I’m all ears!
-Ben S.
Sounds like a good test!
I suggest you get one Ublox F9 RTK kit, and compare the performance of that against the commercial offerings.
The main strength/bonus is the freely configurable baseline. Depending on the vessel, you could test say 10 meter baseline 🙂
Plus it is a lot of fun, and you will learn how RTK really works, all the RTCM messages and all. Interesting stuff, I promise.
https://www.youtube.com/watch?v=MJ9696NjPPc
😉
With respect to the “clear view of the sky” mentioned for GPS accuracy, the 24xd is packaged with an under deck cradle included. We’ve put a few of them under deck thus far and they work just fine so long as the deck isn’t alloy or carbon. On sailboats this is frequently the best way to prevent line/sheet fouling.
I’ve put quite a few GPS units under fiberglass as well. I’m consistently impressed at how little impact it has on their performance.
-Ben S.
Well after running the new GPS 24 I can say it performs much better than the 19 the course line seems to be right on the boats orientation and I have more confidence in my real position on the chart. As for multi path problems, I don’t see a lot of tall buildings on the water here in Maine.
I found the same results going from the 19 to 24. Plus position error is around 2′ with the 24. Worthwhile upgrade.
Any idea how the 24 compares to the Steady Cast heading sensor? I have the steady cast and my experience hasn’t been very good. It will work fine for part of the day then start showing the boat crabbing along sideways. It doesn’t hold calibration apparently. If I go in and make adjustments via the “Fine Adjustments” option, it might take 20-30 degrees to get it corrected. This will work for 10-15min and then it will be way off again. Initialization is in the high 70-low 80 range and no metals in the low center line mounting area. It’s been frustrating at best.
I have the 24x (replaced the 19x) on my Silverton 42C and it works flawlessly. It’s installed on top of my hardtop.
I just added the SteadyCast to my 23′ Crownline with a Simrad MFD. It does not work correctly out of the box so it does need calibration that I haven’t done yet. I have a new Garmin 743 to add to the Crownline. Once that’s in, I’ll calibrate the SteadyCast and see how it is.
Thanks Kevin. Mine is mounted in a diesel Skipjack 25 (West coast built fishing boat) 20 knot cruise speed. The thing that is weird is it mainly goes off heading when we’re running straight for miles heading out or back in.
That would be frustrating. Have you tried calling Garmin? I’ve always found them to be very responsive.
Hate to suggest spending twice the money for a 24xd, but I’m glad I bought mine. Accuracy at 2′ to 3′.
Good luck.
I have called Garmin. They asked me if I’d applied any updates and what my numeric result of the initialization was. I said yes. it’s current, and gave them the number. (around 70-72 at that time.). They asked a few other questions and then said they’d look into it. That’s been a year or so ago. I’ve re-initialized until I’m blue in the face with no change. Currently close to chucking it over the side.
Bummer. If you want to try the 24xd, you can pick it up for under $250.
Have you selected it as preferred source in chartplotter?
Yes. The Steady Cast is the preferred heading source.
Try the GPS 24 as heading source.
I don’t have one. That was the point of the original question. I asked if the GPS 24 was any different from the steady cast. I wondered because if they just put a steady cast into a newer GPS receiver, I don’t want it. If it’s better, I’ll consider it.
I’m working to outfitting my new 23′ boat with a Garmin 1243 MFD and the new Fantom 18x radar. Do I need to have one of these receivers in my network or would this be considered a nice to have that I could add on later? Thanks
Depends on what you expect of your radar? If you are OK with having CourseUp display only then you are fine without it. But if you want to be able to display North Up or Heading Up then you will have to have a heading sensor. I can’t remember ever installing a radar without a heading sensor – in 39 years of doing this. Seems like a false economy to me.
So I’ve learned that Marpa won’t use the heading info from the GPS24. I’m going to try and do a calibration and see if that works. Marpa just won’t activate a target.
I’ve been looking for magnetic compass input to a Raymarine package using the NMEA 2000 network. We added a 19x last season that talked more reliably to the Simrad RS35 VFH with receive only AIS. So when I saw this article I was interested in the 24xd until I read the manual. It seemed to read just like a Smartcast which I installed on a boat but never could get it to work properly, just like others have commented on above. So that was the kiss of death as far as I was concerned.
Searching the internet there is a device out there, a no name , that is sold by suppliers in the UK, in the low $200 range. Others that are advertised by the big guys are stupid money overpriced. Just saying
Alden,
I’m wondering if you can elaborate a little on your concern with the 24xd. Are you referring to the Garmin SteadyCast heading sensor? If so, the calibration routine is the same but I don’t think there are too many similarities beyond that. The GPS 24xd is, first and foremost, a GPS multiband GPS receiver. It does have a heading sensor also, but that’s almost a bonus included with the GPS receiver.
I suspect that many of the installation challenges with SteadyCast receivers comes from magnetic interference. Dedicated heading sensors are usually installed belowdecks somewhere and it can be challenging to find a location not subject to magnetic interference from metal, motors, etc. The 24xd has the advantage of being mounted higher on a boat and usually not subject to as much magnetic interference.
In my experience, the most reliable source of heading data is a satellite compass. Garmin’s MSC10 (https://panbo.com/garmin-msc-10-installed-and-testing-underway/) and Furuno’s SCX-20 (https://panbo.com/furuno-scx20-scx21-satellite-compasses-the-impressive-demo-at-nmea) would both fill the bill.
-Ben S.
Yes Ben, I apologize for the poor entry. I was on my first draft and was interrupted and then hastily added more with out proofreading and editing. So, yes, I meant SteadyCast. I’m sure they are straight forward to set up with Garmin gear but, really, I never was able to get a good presentation on a non Garmin display and I followed instructions. The presentation was always crabbing along the course line, as was mentioned in some of the comments above. So that why I shied away from even considering the 24xd.
As far as the links to the satellite compasses that you presented, these fine devices have a place in the super professional world, but are stupid expensive for ordinary folks. That was my point there.
So let me end off here. While I was working on this, Allan Seymour contacted me through this site and I will see him tomorrow.
Best to All!
Alden Cole
Alden,
Thanks for clarifying. When I’m back on my boat, in a week or two, I’ll set up a test with a 24xd and a non-Garmin display. I believe the calibration should be carried through, though there is no doubt they’re worse to calibrate without a Garmin display onboard. And perhaps that was your point the whole time and I missed it.
Glad you and Allan hooked up, and hopefully, that proves fruitful.
-Ben S.
Alden if you are in Camden come to the SallyW and see it work!
Will do Allan. See you tomorrow.
I did end up getting a 24X. So far I can definitely tell the position data is more accurate. The heading sensor, on the other hand seems just as bad as the steady cast that has become my nemesis. I did the calibration twice and ended up with 70 and 72 results. The heading points 15-20 degrees left of actual and seems to stay there. I used fine adjustment to try and correct but it stays for a few seconds and goes back to the error. Maybe I’ll save up for a sat compass.
I think respectfully that something is wrong with your setup. No one I have seen has had the same experience.
Also respectfully, Anything is possible. 🙂
I’ve only been out once with the 24x. Will try and recalibrate next trip to see if it helps. Also will double check to make sure the magnetic/true selection is correct. On the steady cast, the variance was all over the place. it was just a mess. My experience so far with the 24x is that the variance seems to stay the same, about 15-20 degrees to the left of actual. This leads me to believe that there may be some setting that needs attention or there is some magnetic interference. The thing that’s odd, in my mind, is that when you manually adjust with the fine adjustment, it stays for maybe 10-15min then is right back to being off again. Will post if I find anything. The mounting position of the steady cast was low center line, beneath the V birth. The mounting location on the 24X is about 2/3 of the way up the stainless tower with a clear sky view. Will also check for magnetic variance near mounting location.
I did a cursory search for other L5 frequency capable (or L5 only frequency) marine GPS receivers and found none other than this model introduced in 2020. Any ideas why?
Ted,
I don’t have any inside knowledge about why others haven’t added L5 capabilities. However, I have a few theories. My first is that GPS receivers tend to run a very long time in product catalogs. Most new MFDs (though often not the largest in the lineups) include GPS receivers. Hence, I think sales of standalone receivers are pretty light. Additionally, even without dual-band capabilities, GPS receivers are pretty darn accurate.
It is interesting to note, I don’t think anyone else has followed Garmin’s dual band lead nor have they added the heading sensor Garmin includes.
-Ben S.
Thanks Ben. Interesting observation on long “shelf life” of GPS receiver. I see that Maretron offers the same GPS200 I purchased for my then new build in 2009.
FWIW, I inquired w/Maretron to see if they were working on L5 and they told me “no”.