
Garmin MSC 10 installed and testing underway

Garmin announced the MSC 10 satellite compass just as I finished my review of their GPS 24xd GNSS and heading sensor. So, I’m anxious to test the MSC 10 and see how it performs, how it compares to the GPS 24xd, and how it stacks up against other manufacturers’ satellite compasses.
Satellite compasses offer stable, high-precision heading data with multiple GNSS receivers. Vessel heading is computed by comparing the position data received from two receivers. Satellite compasses aren’t susceptible to magnetic interference like traditional magnetic heading sensors. Although, the MSC 10 includes a magnetic heading sensor to backup the satellite receivers in the event of a loss of satellite reception. I’ve done a lot of digging, and I can’t find another satellite compass with a magnetic heading sensor. All the satellite compasses I’ve seen recently include attitude reference heading systems (AHRS) that provide pitch and heave data to make the heading measurements as precise as possible.
Precise heading and heave data provided by satellite compasses allow displays to correct for the boat’s movement. So, instead of showing the bottom get closer and further as the boat heaves in heavy seas, sonar displays can correct for vessel heave and display steady depth data. With accurate heading data, radar displays — especially radar trails — can be corrected for the boat’s heading variations as the boat moves around in a seaway.
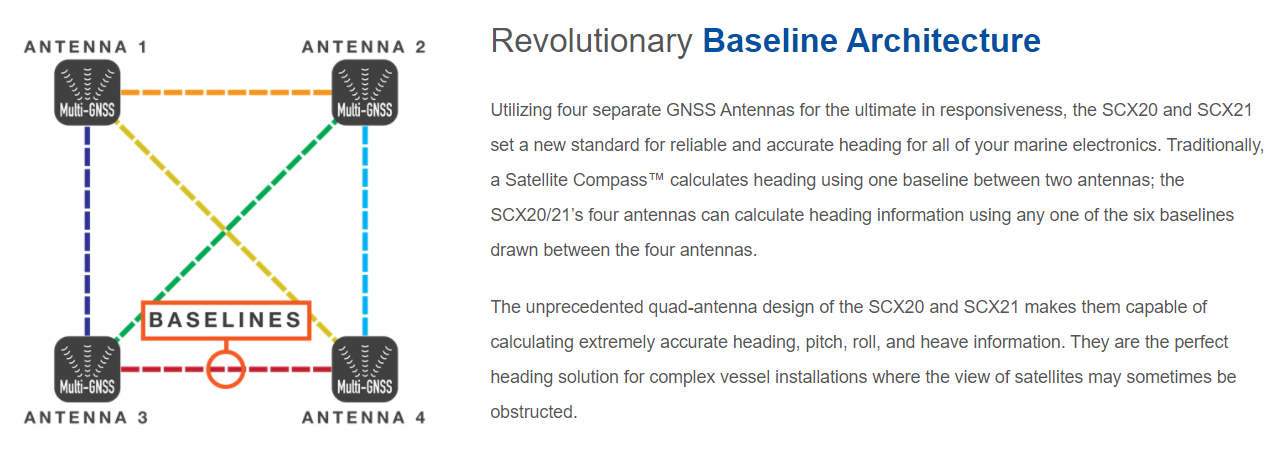
The $1,100 Garmin MSC 10 uses two GNSS receivers to compute heading and position data. Furuno’s SCX20 and NMEA 0183 sibling SCX21 (written up by Ben E. after our demo ride) have four receivers and can use six different pairings of antennas to ensure accuracy and interference rejection. Satellite compasses can be prone to multipath interference — when the signal from a GNSS satellite to the antenna on the boat is either blocked or reflected off other objects on the boat — and Furuno’s use of four receivers and interference guards around the sensors seems to greatly reduce interference. I’m hoping to get my hands on an SCX20 and compare the performance of the two units.

I am paying more attention to what’s included in the box with marine electronics. I was pleasantly surprised to see that Garmin includes not only mounting hardware and NMEA 2000 components but also a tube of 3M 4200 to seal any penetrations if you mount the compass on a flat surface.
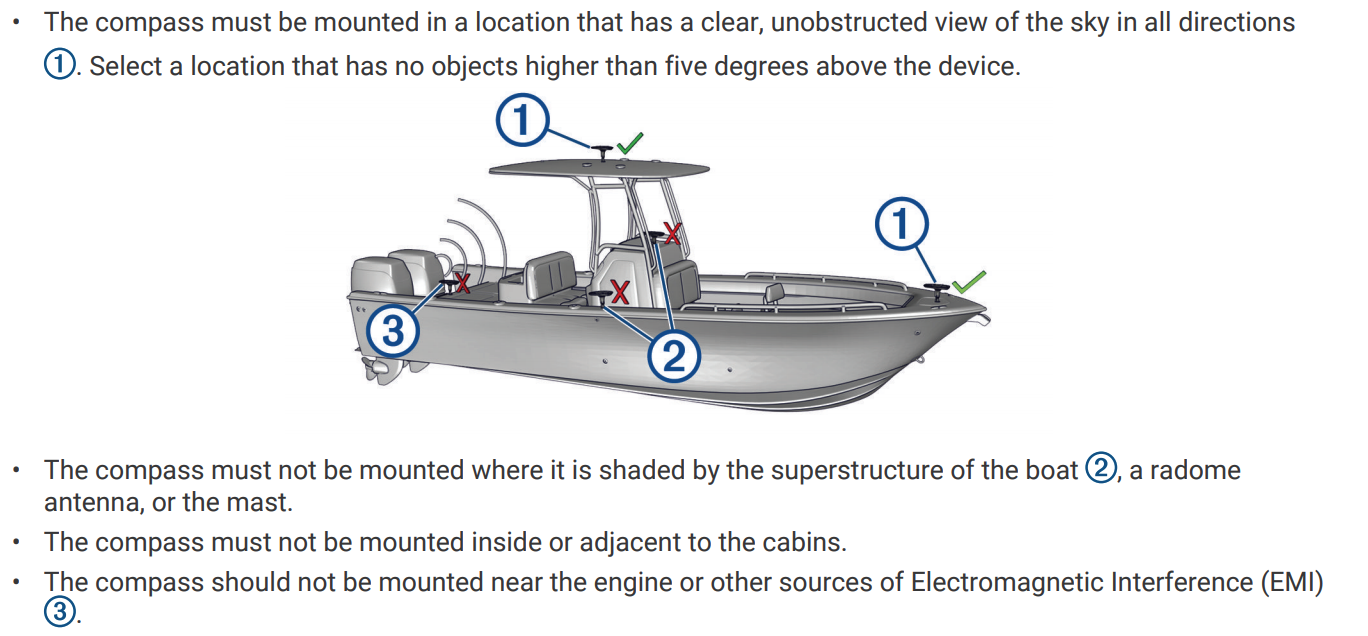
Garmin’s install instructions show the appropriate options for mounting the GPS compass 
Connecting the MSC 10 consists of a single NMEA 2000 cable 
Installing the MSC 10 on Panbo(at) couldn’t have been much easier. It comes with a 1-inch 14 antenna mount or you can mount it directly to a flat surface. The MSC 10 has a built-in magnetic compass that can provide heading data when GNSS signals are unavailable. But, to take advantage of this, you will need to mount the compass in a magnetically safe location. Because it met all the requirements for a mounting location, I mounted it to the same antenna ratchet I’d previously used for the GPS 24xd. The compass has a single NMEA 2000 port on the bottom so all that’s required is connecting one NMEA 2000 drop cable, which Garmin nicely includes.
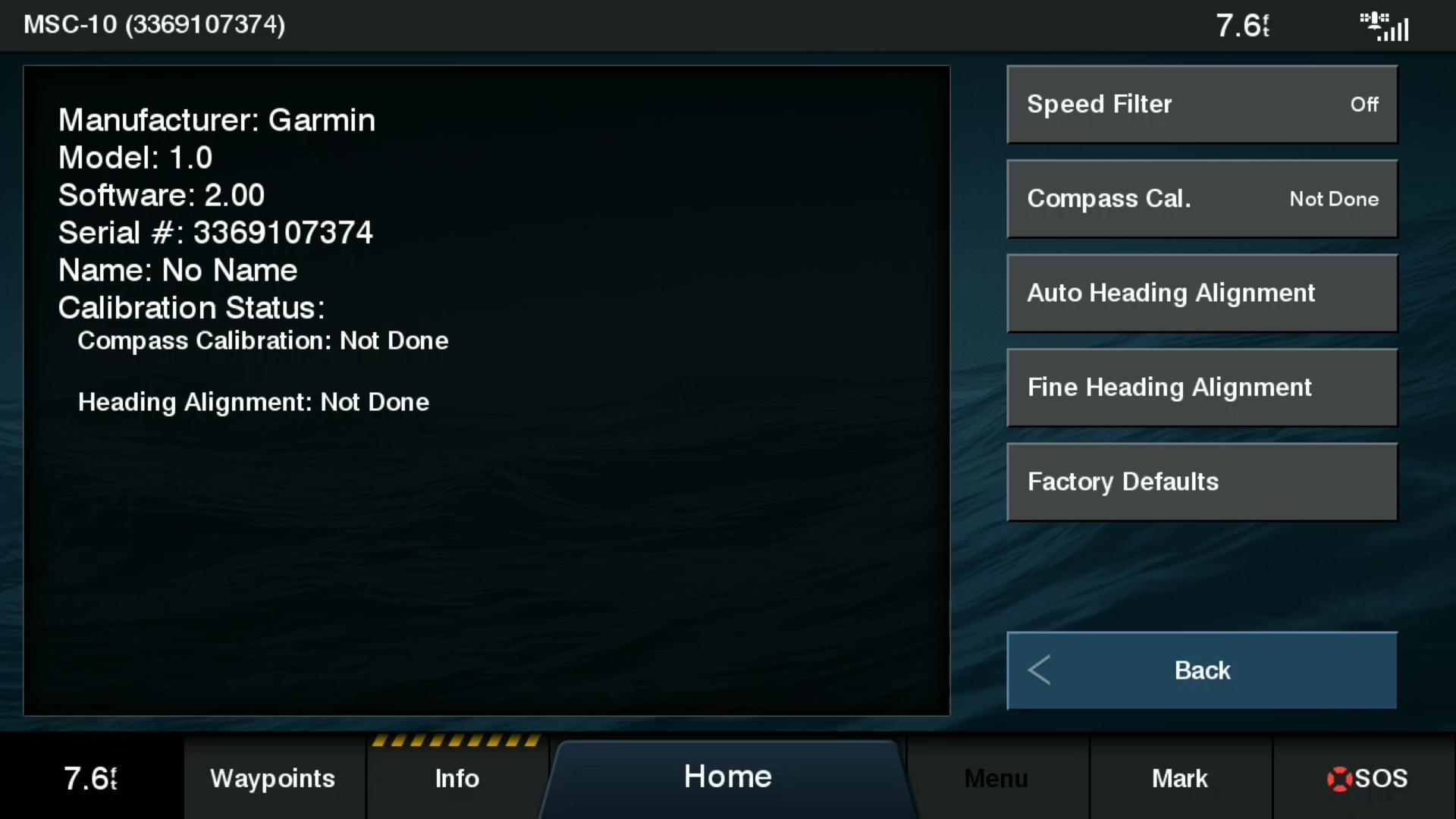
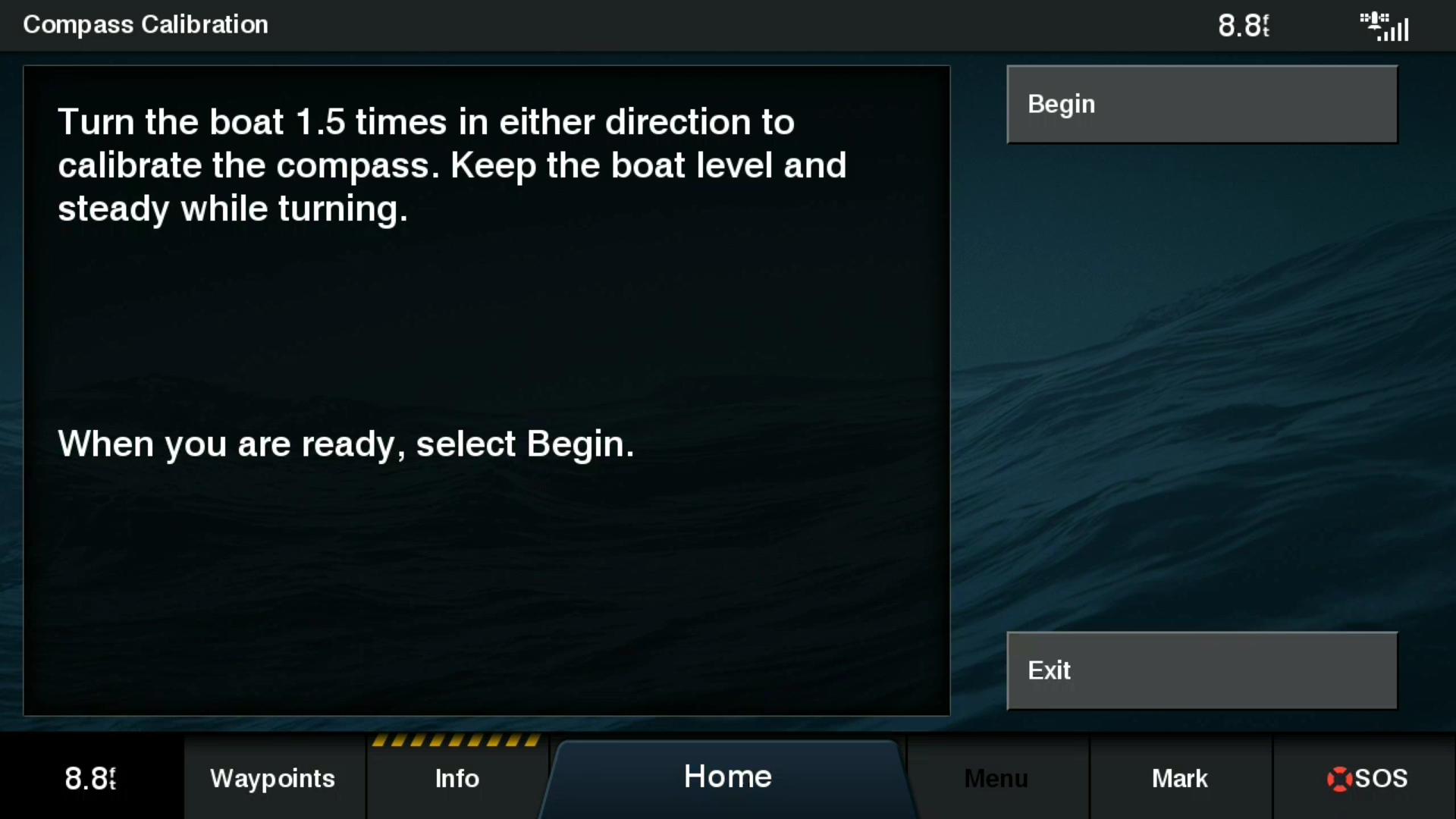


Once the MSC 10 is installed and connected to the network, it starts working without any calibration. If you plan to use the magnetic compass, Garmin recommends calibrating it. Calibration is similar to the GPS 24xd’s: one and a half slow circles and then 45 seconds of straight cruising to calibrate and align the compass.
In another similarity to the GPS 24xd, the MSC 10 uses a dual-band, L1 and L5, GPS receiver that allows for greater location precision. The two GNSS sensor Garmin MSC 10’s heading measurements are accurate to 2 degrees RMS. By comparison, Furuno’s SCX20 offers 1-degree precision. But, Garmin reports position accuracy of 1-meter while Furuno lists maximum accuracy of 3-meters. I believe the dual-band GPS receiver allows Garmin to deliver greater positioning precision.
While comparing the MSC 10 to other GPS receivers I noticed that both the Furuno SCX20 and the Simrad HS60 output NMEA 2000 PGN 127251 – Rate of Turn, but the MSC 10 doesn’t. I’m not sure if this will impact the MSC 10’s performance in any of its applications, but I also found that Garmin’s 9-axis heading sensor does output 127251.
Although it’s early in my testing I have seen steady and predictable heading data produced by the MSC 10. Calibration was easy and I’m a fan of the inclusion of a magnetic sensor to back up the satellite receivers.








Garmin is certainly in the lead providing dual band GPS receivers for the marine market. It would be great for Furuno, Navico, and Raymarine to follow
IIRC dual band is used mainly to overcome multipath errors. Especially usefull in cities, less so in open spaces. Obviously the accuracy is better with dual or triple band receivers.
Would be nice to see a comparison with the SCX20, because Furuno claims their 4 receivers also reduce multipath errors.
@Ben, the SCX20 has a magnetic sensor, according the manual. I do not know what it does, I assume it is used for the dead reckoning.
Actually dual band is mainly used to cancel out the ionospheric error. Anti-multipath is a nice bonus.
Hi Andy,
Thanks, you are right.
I had this information from a test with Garmin hand-held receivers.
But they were wrong in their conclusion.
I am sure there is a reason why Furuno gives the maximum accuracy of the SCX-20 as 3 meters. However, after a year of using one, my experience is that it appears to do better. My slip is about 3.5 meters between the pilings and my SCX-20 is mounted dead center on the boat. On a repeatable basis, the SCX-20 shows me in the same spot within a foot or two. If I compare that to the position output from the internal GPS sensor in the Furuno TZT 3 MFDs, which will often show the boat a bit to one side or the other in the slip, the accuracy advantage of the SCX-20 is very apparent.
My observation is that Garmin is somewhat more aggressive in putting forward marketing claims that the rather conservative Furuno engineers. It doesn’t make a lot of sense that triangulating position from two GNSS sensors in the Garmin MSC10 would be inherently more accurate than the four sensors in the SCX-20.
I note that Simrad also claims 0.3m position accuracy for its HS75 satellite compass. Maybe you could reach out to your contacts at Furuno for an explanation of why the SCX-20 is specified at 1 meter while the competition claims greater accuracy.
I have the SCX-20 now for about 6 months in use. In Timezero it shows an accuracy of 0,78m. I do no know how this is calculated, but the ship’s docked position on the chart (Navionics vector based) is spot on and virtually does not move when moored.
I am also wondering why dual band GPS should do better than single band, multipath excluded. Because this topic is new for me, I checked it to see what it is. Appearantly the only difference is the stronger L5 signal, but coming from the same (okay, replaced by newer types) GPS satellites. The whole basic of GPS satellite positioning calculation is unchanged, no additional satellites are added. The more satellites in the correct angle to each other and the receiver, and less atmosferic disurbances, the better the position calculation (accuracy).
Some tests of handheld Garmin receivers (for hiking) I read about, are showing quicker first position fixing time and much better accuracy (less deviations due to multipath) in the city. In open space (forest in this case), accuracy differences (deviations) were minimal (due to absense of multipath errors).
Dear Wolfgang,
I interacted with the TZ support staff regarding the GPS accuracy being displayed when I first noticed that the GPS input I was using at the same time showed a much more conservative accuracy and I was left with the impression that TZ would eventually revisit their calculation.
Second, while it is true that the L1 and L5 signals come from the same sattelite, it is also tru that the frequencies are not the same. One can use the frequency difference as a venier to improve the position accuracy as well as more accurately correct for atmospheric distortion. That’s why the US military has used dual frequency since the inception of GPS. The same reason position sensitive farming equipment as well as land survey equipment had used dual frequency for some time. The delay in its availability to the marine market has simply been cost vs perceived need. At the moment, very few marine charts, if any, are accurate enough to where one would be sensitive to the accuracy available from dual frequency GPS. Having said that, I still want one. Sigh.
Hi Donald,
the SCX-20 replaced the GP-70 from Furuno (which was a replacement for the Decca nevigation system, we had a Philips Ap Navigator https://www.wikiwand.com/en/Decca_Navigator_System).
Anyway, that time (eighties) I wanted to know how GPS works. L1 had a selective availability (i.e. U.S. Government could set the accuracy at will), and L2 was/is encrypted (for military use). About 15-20 meters was the best you could get. Until the Gulf war, where the military had to use commercial systems (partly) and selective availability was set to 0 / shut off.
Long story short, nowadays GPS (without atmospheric distortion) has an accuracy of about 0,7m (see URE). Indeed the atmospheric conditions can be partly eliminated using multiple frequenties (L1, L2, L5), multipath can be eliminated if the stronger L5 signal can travel trough the obstructions, otherwise not. Accuracy is further improved with WAAS and by multiple stationairy readings (averaging to get into the cm or even mm range).
You are right regarding the marine charts and need for dual frequenty GPS in the marine world.
Maybe the multi GNSS still is the better option for marine use, there are 4 (and if the British do what they want to do, in the future maybe 5) different GNSS systems available and theoretically you can mix all the satellites in your position computation, getting the best results.
A “stronger” signal has little benefit regarding the multipath. It happens regardless of the signal power.
There are various ways to combat multipath, from classic ground plane choke ring survey type antennas to more modern digital beamforming, and of course extensive signal processing, But signal strenght alone has a little to do with this.
Dual band is mainly used to cancel out the ionospheric error, one of the biggest sources for GNSS. Also L5 signal is much more modern than “ancient” L1, plus being stronger, so there is substantially stronger correlation confidence for that signal increasing the accuracy, plus much more controlled band (L5) thus less interference.
Anti-multipath is a nice bonus.
one of the biggest sources for GNSS -> one of the biggest sources of error for GNSS
I’d be interested to hear about what affect this has on the sonar display. Specifically, do Garmin MFDs compensate for roll and pitch as provided by the MSC-10
Very excited to see your full review of the MSC-10 as I’ve been anticipating this product for a while. I’m curious if the back up magnetic compass is needed if I already have the 9 axis heading sensor. Can a back up compass be selected in a configuration screen if one exists on the network?
I believe there’s no difference, it’s always giving heading, but with moreless precision. Also, when you start, is already giving a heading, that will have more precision as long as it improves GPS position
The installation position of the sonar sensor and the sat compass differ. In big boats by some meters. So this difference and the movement of the boat itself has to be taken into account for a proper compensation. How is this done?
With the Furuno hardware, the positions of the transducer and satellite compass on the boat are entered into the settings to support the heaving compensation and pitch and roll data. It works very well. Over a flat seabed, you can be in 6 foot seas and the sounder shows the bottom as a straight line with constant depth readings. Before I had the satellite compass and the heaving compensation, the bottom would have been wavy and the depth reading would have been bouncing up and down with the waves.
Does the Garmin MSC 10 use the heave data to compensate and flatten the bottom sounder return in the same way that Furuno’s SCX-20 does?
I believe this is actually a capability of the MFD, not the sat compass itself. I don’t believe Garmin yet supports this, though it’s something for which they’ve discussed adding support.
-Ben S.
I wish Garmin would support heave data to compensate for swell and chop and flatten the bottom reading. This feature would be fantastic for finding small fishing ground in rough conditions.
Any updated thoughts from Ben and the field on Sat compasses? Looking at a Raymarine install and trying to decide between MSC10 and SCX20 unless Raymarine brings a satellite compass to market – and understand how much it would give us above the AR200.
Current Garmin setup is running on a Steadycast, so all are likely an upgrade.