
Sailing with an Airmar PB200 – Part II
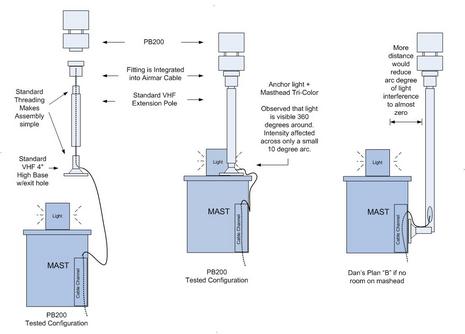
Many readers have commented on my Sailing with an Airmar PB200 entry. I enjoyed reading and responding to comments, and offer this diagram in response to some questions about mounting the PB200. The diagram above (click to enlarge) shows the parts unassembled, and then assembled on the masthead, along with an alternate “Plan B” my yard came up with before installation in the event my masthead was too crowded. (Credits to Jeff Willis at Willis Marine in Huntington, NY.)
The PB200 was designed to be used with marine VHF mounting hardware, like those I found at West Marine. On one end of the PB200 cable is a large two sided fitting that screws onto a standard VHF extension pole, after leading the cable thru the pole. With the fitting installed, the top of the pole then becomes a receptacle for the PB200 which is plugged in after all the other installation steps are completed.
Some things to look out for when choosing a location on your mast … don’t get too close to any masthead lights. My installation is very close to my tri-color and anchor light. As the lights are wider than the mounting pole, they are visible, but dimmer across a 10 degree arc where the pole is. It’s fine, but had I used LED masthead lighting I would expect the light would have been entirely blocked across 10 degrees. I imagine this could be reduced close to zero if you can get the pole six or more inches away.
The instructions recommend a 3 foot distance from the VHF antenna (on your masthead). As my helm and nav stations is filled with electronics with such requirements that can’t be meet, I have become numb to such requirements. Although I didn’t have a problem, you could easily double the distance I got, by mounting as per Plan “B” in the diagram .. or attain the full 3 feet separation using a tall extension pole. Plan “B” also has the virtue of gaining additional distance from the masthead light.
The placement of the PB200 over the masthead, rather than forward or aft as you see with some top line wind sensors, provided astonishingly good results both upwind and downwind. I would highly recommend you do the same. The local birds might be unhappy, but the straight up and down installation is simple and sturdy.








Ben,
I have had a Maretron WSO 100 installed on my Gozzard mast top exactly as you describe for 2 years now, with very satisfactory results.
The only difference is that I substituted a custom made base for the standard one as my mast top was not large enough to support the diameter of the standard unit.
Better mount without any significant light obstruction:
Lopolight (I know its pricey – but beautiful enough to make you want to climb the mast) has an optional top cover with incorporated 4″ tall VHF mount. Aluminum and light weight.
Our mount: Lopolight topped by the optional VHF mount – 12inch Gemeco aluminum VHF mount extension tube (lighter and stiffer than Shakespeare extension) then wind sensor.
Note Airmar had a mock up – not produced yet – SB200 or something like that meaning sail boat with a mount on top for the VHF antenna.
VHF whip antenna is still an obstruction but can be at aft end of masthead or even extended a foot behind in a fairly typical install with Windex on the whip.
Note depending on your NMEA 2000 install having a compass at top of mast in addition to one in the hull produces a second string of conflicting compass information that can confuse some instruments/displays (Maretron) and not others (Simrad) – don’t know about any other manufacturers.
Which VHF mount did you use? The nylon one?
My mast is on the ground and I’m still doing a lot of prep work. For instance, I’m doing the drilling for a double spinnaker bail and I can do the drilling for VHF mount as well. The stainless steel version seemed pretty heavy, overkill.
The sailing version should have an LED tri-color and anchor light either built-in or have a mounting platform for them, instead of the GPS. It should also have an option to mount a VHF antenna on top. I think the recommended 3 foot separation assumes they are in the same horizontal plane; mounting the VHF on top should minimize interference. If the power and coax cables can’t be designed to pass through, they could probably be designed to pass around in a loop at a reasonable distance so the interference with the wind sensor is minimized.
Norse, thanks for jogging my thinking a little. I actually can do this today. I have the Lopolight tri/anchor LED with the VHF lid, the last one sold. So I put the Shakespeare extender on top of the Lopolight, and I now can put the PB200 on top of that with no obstruction issues at all. The VHF antenna goes aft with the Davis windex rotating on it. I’ll send some pictures next week when the installation is all done.
Norse: I think the GPS is used internally by the unit to calculate true wind and possibly refine other data so the instrument can send those PGNs without consulting other shipboard instruments. Since you can buy bluetooth GPS receivers for $30, I don’t think it adds much to the cost of the unit!
I WORRY about heat and RFI from mast head lights affecting the unit; I’ld like to hear some comforting words.
And I would really like to know what Garmin’s GMI-10 can do with all that data!
Olsonist wrote “Which VHF mount did you use? The nylon one?”
–> I went with the stainless base and polycarbonate pole. I was concerned the nylon base was subject to damage by ice during winter storage with mast up. Remember to use corrosion protection if your masthead is a different metal, like aluminum.
Sandy wrote “I WORRY about heat and RFI from mast head lights affecting the unit; I’ld like to hear some comforting words.”
–> I don’t see a problem, the PB200 is mounted 24 inches away
Wow this article captured the interest of many readers to respond … thank you all for being so engaging, this is a lot of fun for me.
I am writing this comment to clear up some confusion evident in comments regarding sensors involved in wind calculation.
For example there was confusion around true wind and which sensors were involved in calculating it that I want to dispel. For example the comments about GPS’s role in the calculation (GPS is not involved at all), some confusion about “what if’ VHF interferes with GPS would it interfere with true wind (no !), and does the GPS need to be in the PB200 to get these astonishing results (no !), or does the network move GPS information fast enough that the proximity of the GPS sensor matter.
So let me clear up the confusion about how true wind was calculated during testing. Hopefully I won’t cause any new confusion or make any mistakes doing this …
In the order I list below, is how I see the sensor information building upon each other to get the results I experienced.
Call me out if I screw up below, this true wind stuff gets tricky, but I am 97% sure this is how each of the sensors built upon each other:
1. PB200 Apparent Wind Speed and Angle = “on” and configured at 5x per second as an output to the NMEA-IN port of the Raymarine E-series. I believe the only sensors involved are the temperature and angle of heel corrected ultrasonic wind sensor, accelerometers, and motion compensation software.
Note: This was all that was used by the autopilot to steer 45 & 130 degrees off the wind, and obtain the astonishing wind readings I saw on my ST60 Wind Display, E-series chartplotter, and the amazing autopilot results I reported.
2. Next sensor up … isn’t on the PB200, but rather the paddlewheel sensor under the boat which is an input to the ST60 Tridata, which in turn outputs SOW (speed over water) onto the seatalk network to the e-series. This is needed for true wind calculation angle (as a number of degrees starboard or port from the bow) and true wind speed.
3. PB200 True Wind Speed and Angle (relative to the bow) = “off” (True Wind was instead calculated by e-series, using above sensors only).
Note: The True Wind readings that were appearing on my ST60 Wind Display, when I toggled true wind mode, used only the sensors above.
4. PB200 Compass Heading = “on” at 10x per second
Note: The E-Series then calculated the True Wind Speed and Angle (relative to magnetic north), and displayed on my e-series data window.
5. PB200 GPS Lat/Long + COG + SOG = “on” once every 2 seconds.
Note: The E-Series then calculated the Ground Wind Speed and Angle (relative to magnetic north) and displayed on my e-series data window. I have made no comments in the article about this reading, it wasn’t at all the focus of the testing, but mentioned here to highlight that the only role the GPS has in wind calculations was non existent until this step. It is an option of the PB200, in the event of a paddlewheel failure to substitute the GPS SOG for SOW, but that was not the case during testing.
I expect this explanation is going to support the point I made in an earlier comment that the compass heading and GPS sensors were not relevant to the results I experienced and the technological stars in this evaluation where the accelerometers, motion correction software, while the ultrasonic (no moving parts) wind measurements were important but secondary.
Make sense?
That’s not to say I don’t value the mast mounted PB200 compass. I did get great results and agree with Ben, that “our notion of where to put a compass may get inverted”. When I get back in the water I expect I will find this will greatly improve the true wind angle (relative to magnetic north) and ground wind angle and speed reported … measurements that in the past were so inaccurate I really didn’t give them much attention. I also expect I will find my e-series displaying better set and drift information, that can be useful in navigating the shortest distance on my longer passages.
Again, thank you all for being so engaging, this looks like one of the most commented on articles on Panbo, and it has been a lot of fun for me.
-Dan
Dan
My aging ST50 instruments are sitting in a grocery bag covered with fiberglass dust, and I’m very interested in the Airmar PB200. I am very glad you’ve shared your positive experience with it. Where you have chosen to do true wind calculations in your tridata to send to your chartplotter, I would prefer to use all of the features of the PB200, in which case the GPS, compass, accelerometers, and motion compensation software are used by the internal processor to send true and apparent wind data as distinct PGNs or NMEA words without needing external data from the paddlewheel. This frees up the processor in the chart plotter.
The difference between using speed through the water or speed over the bottom was debated elsewhere recently and got bogged down in syntax. My simple mind is only capable of distinguishing true wind as what you feel on your face when you aren’t moving, versus what you feel on the boat. The difference is the movement of the boat, which is the sum of current, crab, and progress through the water. Crab is very important to a catamaran with shoal draft keels. And its very difficult to measure.
I may have missed the answers, but I’m still wondering. Would the EMI from a Masthead LED affect the PB200? Will the compass in the PB200 provide the data rate needed for MARPA? Can a nearby VHF antenna be a problem? Do I have enough room left in the electrical conduit in my mast for yet another cable and plug? Who is going to win the Belmont?
Sandy wrote “I am very glad you’ve shared your positive experience with it.”
>> Your welcome!
Sandy wrote “Where you have chosen to do true wind calculations in your tridata to send to your chartplotter”
>> The tridata provides a SOW source to the e-series chartplotter, the charplotter does the true wind calculation.
Sandy asked “Would the EMI from a Masthead LED affect the PB200?”
> Don’t know. Not apparent to me why there would be a concern.
Sandy asked “Will the compass in the PB200 provide the data rate needed for MARPA?”
> Yes, meets the 10hz data rate that most people use, and worked well with MARPA on e-series.
Sandy asked “Can a nearby VHF antenna be a problem?”
> Don’t know. Not apparent to me why there would be a concern. Should it be, disable the compass and GPS, the other sensors are what give the astonishing wind results, the compass and GPS already exist on most our boats already.
Sandy asked “Do I have enough room left in the electrical conduit in my mast for yet another cable and plug?”
> How to tell ? The way my yard passes the cable thru the deck, to minimize the size of the penetration, the plug needed to come off anyhow and be spliced back on. I used the fat cable that supports NMEA-0183 and NMEA-2000 simultaneously. If I was just using NMEA-2000, I would have run the thin NMEA-2000 cable up the mast and made the connection at either the masthead or the mid-mast radar mount instead.
I (Dan) wrote “I used the fat cable that supports NMEA-0183 and NMEA-2000 simultaneously”
>> BTW: I didn’t do this for redundancy, rather I was also evaluting the WeatherCaster PC software which hasn’t yet been released for N2K. That I can evaluate next on N2K with the same cable is very cool.
Thanks Dan.
The EMI concerns originated from some reports of interference from LEDs at SSCA.
All lights generate some heat which would affect the tiny variations in wind velocity between the ultrasonics. I’m sure that this effect was considered, and some precautions were developed, but I have a very busy masthead; it ain’t pretty up there.
Thanks, Dan, for all the info on the PB200. I’ve been anxiously awaiting its availability since replacing my other (dead) sailing instruments with N2K models last spring.
I suppose the coments concerning RFI, data rates, mounting options, and the subtleties of 3-axis accelerometer corrections are appropriate for a propeller-head forum like Panbo (sorry, Ben). But what I’d REALLY like to hear is more information on its performance while sailing to help tease out puffs and wind shifts. (I mean, BOATING is the ultimate objective, after all.)
Dan, your description of the PB200’s excellent performance in autopilot-assisted sailing was very useful. From the description, I imagined that your “steady winds” were somewhat over 10 knots upwind. Have you been able to suss out its performance in lighter air yet? In particular, the PB specs suggest less accuracy in winds under 10 knots. Does this manifest itself when the wind drops, e.g. resulting in increased variability of readings that are not damped out?
Perhaps when you get some round the buoys experience this spring you can provide us with a “Sailing with an Airmar–Part III”!
JCS – Yes, all the on the water tests were above 10 knots true, with apparent wind higher or lower depending on my course. The lowest apparent wind my autopilot was steering in was 6 knots.
I look forward to reporting more on the water experiences in Spring.
JCS askes “Have you been able to suss out its performance in lighter air yet?”
–>With the autopilot no, but at the dock I gained some clues. At the lowest speed I observed (around 2-3 knots) at the dock the PB200 gave me a wind angle I could still believe in (keep in mind I had no way to judge wind accuracy better than say +/- 20 degrees). Both appeared to do fine as long as my boat held steady, when the mast sways or the wind changes direction … no matter the wind speed, a performance difference in reporting wind angle opens up. The PB200 steadfastly held to the reported wind direction even as the mast swayed from the small wakes of passing boats in the nearby 5mph zone, where the mechanical vane and ST60 combination errantly reported a wind angle change.
JCS wrote “In particular, the PB specs suggest less accuracy in winds under 10 knots. Does this manifest itself when the wind drops, e.g. resulting in increased variability of readings that are not damped out?”
— > It came as a surprise to me, when testing at the dock that I would see a difference between the mechanical vane and PB200 … as I am in a 5 mph no wake zone, and thought the ST60 damping function would be entirely effective. I even dragged 100’s of feet of old line from home in preparation for testing … to induce a bigger mast movement, but it turned out unnecessary.
It didn’t take much mast shake to see that the wind angle readings were effecting the mechanical vane and not the PB200.
As a result of this surprise, I spent multiple visits at the dock attempting to find a better damping value for my ST60 / wind vane combination to see maybe if I could close the performance gap with the PB200 when the mast is swaying, and in doing so tried different values for the ST60 connected to my PB200 as well.
I became comfortable with the ST60 connected to the PB200 being set at the lowest damping setting, I continued to see a smooth tracking between the observed movement of the wind vanes and the ST60 display, and got quicker response times as a benefit of the low damping value. I have not tried this low damping value on the water … I’ll do that in the Spring, but in any event the autopilot wouldn’t be effected … it gets the un dampened wind direction right from the PB200 across the seatalk network. I later learned the PB200 WeatherCaster PC software has a damping configuration setting also … I did not experiment with it.
I also came to believe the damping setting Raymarine uses as default for the mechanical sensor is correct. It just doesn’t dampen out as much as I had believed all these years. I am guessing the rather low period of the mast swing limits how much damping can be applied before users become fustrated with the readings being delayed.
Thanks again, Dan, for sharing your experience. It’s been my experience, too, with mechanical sensors in light air that lateral motions at the masthead introduce transitory variations in wind angle readings that one eventually learns to discount. It requires patience and experience (not to mention reliable short term memory) to discern a subtle but persistent wind shift. (Which ability, as they say, is worth thousands of dollars in go-fast sails!)
It certainly seems to me that sophisticated error-correcting algorithms as exemplified in the PB200 have the potential of dramatically improving wind instrumentation for sailors. And with Ben’s report of a forthcoming 3-axis rate gyro in the PB series, Airmar is evidently not resting on it laurels!
My tax refund just covers a PB200. Providence has spoken.
Could we ask Dan for any new information he has regarding the PB200?
The PB200 is easily my most favorite addition to the marine electronics on Breeze Pleeze, and won’t need much prompting to write more about it.
I am unsure if Part III will be about converting over to NMEA-2000 (see post today about the new network on Breeze Pleeze), more experience on the water, or a visit planned by Airmar to come aboard Breeze Pleeze on a day with especially turbulent weather and seas with some fancy equipment to help measure and report on performance in some depth.
Stay tuned.
Dan;
Did Airmar ever visit your boat?
Chris – still wind instument-less
Never had the visit, in the time frame we were aiming in May/June 2009 we couldn’t find a single day with the big seas and wind to perform our planned test.
This is my favorite marine instrument, I should write some more about it and include a video I took that captures the stability of the wind measurement of the mast motion corrected PB200 vs the uncorrected cup and vane sensor.
To answer an old question, the Garmin GMI10 recognized the PB200 out of the box, and displayed apparent and true wind direction and velocity, barometric pressure and trend, compass heading and more just peachy keen! I’m running the Airmar software on my boat PC thru their gateway, and displaying the data on both chart plotters. I expect Garmin’s most recent update will clear up some issues I have that relate to too many sensors, a mix of old and new processors, and two flavors of NMEA colliding. If I can get away from this computer, I’ll get my new DST 800 installed today, giving me depth, speed and water temp on N2K. Then another venerable ST50 instrument will find a place in the too-precious-to-throw-away box.
Nicely written piece. Keep up the good job you’re doing.
Dan.
Thank you very much for your info. I am considering the PB200 in combination with Garmin network/NMEA2000 and a Simrad autopilot.
Do you get VMG to wind in any way?
We have installed a PB200 on a 60′ mast aboard a one-tonner getting ready for the Vic Maui race. Wind and compass readings are very steady even in rough conditions.
The system is NMEA 2000 with an onboard computer and touch screen display running Avia Sail (disclosure–I’m the developer of that product) and Coastal Explorer (getting translated NMEA 0183 from Avia Sail).
The VHF antenna is much less than 3′ from the PB200. We have an AIS receiver but no transmitter. When transmitting on the VHF the GPS numbers from the airmar go crazy. This caused Coastal Explorer to lock up. We fixed it by changing the software to ignore latitudes over 180 degrees and speeds over 200 knots.
However before doing that we set a new sailboat speed record. 1274 knots in only 5200 knots of wind!!!
Avia Sail, Coastal Explorer, and the VHF (which also locked up due to the GPS data) now behave fine. You can try a demo copy at http://www.aviasail.com.
We have not tried the heading output with the autopilot yet. Our Raymarine X-10 autopilot also has a gyro so I’m not sure how that will work.
Thanks for the report, Grahame. I have heard vague mentions of VHF transmission bollixing the PB200 if too close, and also the PB200 causing some VHF interference, but I’ve never tried to reproduce the situation. Hopefully some other boaters who have mounted VHF and PB200 close by will report in.
I did manage to inadvertently test the sensor when mounted about six feet from, and nearly level with, a 4kw radar. It made the GPS position jump around alarmingly but didn’t seem to effect the heading or wind measurements. Please report again during or after the race. Some screen shots of Avia Sail in action would be good too.
I am very keenly following this thread and I am grateful to all contributors. I have an advantage of starting a nav system from scratch and plan to use the PB200 on a 48′ cat running a nmea 2000 network from the top of the mast and connecting a Box PC to the network as a base line. I am having a T bar made up to separate the VHF aerial from the PB200 at thye top of the mast which will leave the tri unit safely in the middle. I will use a stand alone radar with a connection to the network and hope to overlay the nav software as well. Looking at open CPN or Maxsea at the moment. I will continue to get help from this very useful discussion, any comments will be gratefully received!! Many thanks
I have a PB200 on my Alerion Express 33, which was mounted with the wrong cable initially, and became intermittent almost immediately. I finally got that fixed with a factory-fresh AirMar 100′ sensor cable, trimmed to length. Make sure you use this heavy duty cable!! These long cables have the NMEA2000 terminator embedded in the cable, making it easy to end your network at the masthead. The installer initially had a tee connector and terminator up on the mast– not tidy. My revised installation is now working very well; it is an amazing product!
Concerning VHF interference: I have a Garmin VHF300 AIS, and it DOES pick up audible interference from the PB200. The VFH antenna is just a few inches to the side of the PB200. The interference comes n the form of an increased level of white noise in the background of transmissions, as well as a sharp clicking sound at about 3-5 Hz. When the PB200 is unplugged, the interference goes away. When it is plugged back in, the static comes back immediately, and then the rhythmic clicking about 2 seconds later (wind sensor starting up??).
When repairing the cable yesterday, I had the rigger in the bosun’s chair hold the PB200 at varying distances away from the VHF whip. We found that increasing separation to only about 8-12″ audibly eliminates the interference. As Barry D. above is planning, we will now put the VHF antenna on an 8″ stand-off to the port side of the masthead.
Vicent, did you mean you used the optional NMEA-2000 terminator embedded in the PB200, selectable by inserting the little gold pin in one of the pins of the socket ?
Dan, Airmar had to change the termination scheme to get NMEA 2000 certification. It was supposedly because the pin system made it impossible to tell visually if there was termination or not, but I don’t understand how termination built into the cable is different. At any rate, Furuno’s recently released version of the PB200 reverts to the original design, and is uncertified “CANbus”…kind of a flip off to NMEA 😉
Dan, Ben,
If you look on Page 16 of the AirMar manual for the PB200 (airmartechnology.com/uploads/installguide/PB200UserManual.pdf), at the bottom of the page you will see the spec for the long cable with termination, and the note that all of their cables longer than 20 ft have the terminator.
Ben, AirMar LABELS the cable something like “sensor connector contains terminator” near their connector. So I guess that qualifies as visually distinguishable for the certification. Bottom line, it is a MUCH better way to install one of these on a masthead!
Best,
Vincent
Dan / Ben:
Here’s how we are going to mount a PB200 on top of our Lopolight setup:
http://picasaweb.google.com/lh/photo/paUV26FFFPwejJlC6GHKiHlkjkt8oZQA9HbPo2UQULg?feat=directlink
Regards,
Ted
Very impressive Ted !
I purchased a PB200 right after the change from an internal resistor to one in the cable. (Had a wait a bit as the cables weren’t even ordered by Airmar yet.)
Airmar sent me a cable with the label stating it had the resistor installed. I have my doubts. The error count on my network shot up and I eventually tried an inline resistor at the base of the mast.
Probably not optimal, but everything works.
Just my opinion, but resistors in hard to replace cables–like this installed in a mast–are a very bad idea.
But I do like the reading I get from the PB200. (Mast height is around 70′)
Hi Guys,
Here is some comments regarding the PB150 and most of it is relevant to the PB200 as well. This is a revised letter I sent to Airmar and I list a few questions I am currently trying to figure out. I am hoping Airmar will answer but in the meantime any comment / answer is much appreciated here on Panbo.
Setup:
I chose the PB150 because I don’t use NMEA 2000, and I already have a rate gyro compass with my Furuno autopilot so I didn’t feel I needed to pay extra to get the 3-axis compass found in the PB200.
I mounted the PB150 on a 35cm high extended VHF base next to the navlight on the masthead (16m mast) and it sits approx 50 cm from the VHF antenna.
I use an Actisense NDC-4-USB NMEA data multiplexer (I think Actisense actually make the Airmar NMEA 0183 combiner). Using the Actisense I am successfully connecting my PC to the PB150 using the WeatherCaster software.
I use a Wind-a S400 wind meter from AdvanSea/Plastimo.
I also have a Furuno RD30 display, Furuno 1724c chartplotter, Furuno Navpilot 510, and Furuno PG500 Rate Gyro.
Feedback, Comments, and Questions:
PB150 / GPS receiver
When installed at the masthead on a sailing yacht the GPS receiver in the PB150 is not very useful. When the yacht is en route the receiver is constantly in a pendulum motion which results in the SOG and COG figures to fluctuate far too much to be of any use for navigation by a chart plotter.
I was surprised the GPS performed so poorly (even on a flat calm day with the boat just gently rocking on some small ripples) so I took out my handheld Garmin GPS to compare figures. If I held the Garmin in my hand it would give a very stable SOG and COG, but if I just slowly moved my hand left and right and back and forth (and I really mean slowly and gently) the figures started to exceed a variation of +/- 1 knot and +/- 5 degrees. This is a very simple test that anyone can do. It makes me think that many sailing boats out there with a GPS antenna mounted on a rear solar panel arch with a VHF extension pole will not have a very stable SOG and COG.
The Airmar software does not allow changing any settings for the GPS receiver such as position smoothing (smoothing coefficient) and spd/cse smoothing (dynamic coefficient) as with for example a Furuno GP-320B.
Question: Does WAAS or no WAAS make any difference in the smoothness of the SOG and COG calculations?
Question: Does the GPS receiver have a built-in magnetic variation table?
Question/Suggestion: Can a correction algorithm using pitch/roll from the 3-axis accelerometer (similar to what is done with the apparent wind speed and angle) be applied to the SOG and COG figures?
Suggestion: Can the firmware be modified to disable the GPS receiver so that it does not use any power and possibly interfere with the VHF antenna for those boats that prefer to use an external GPS receiver?
PB150 / 2-axis Compass (heading sensor)
The manual for the PB150 states that the internal 2-axis compass is not good enough for a reliable heading and that the internal COG should be used instead. Following my discussion above I don’t think that would help much and it seems to me that the only reliable calculation is using the HDG from another properly (as close to the centre of gravity as possible) mounted Rate Gyro.
Question: What is the compass used for apart from getting the heading for true wind calculations?
Suggestion: Can the firmware be modified to disable the compass so that it does not use any power and possibly interfere with the VHF antenna for those boats that prefer to use another heading sensor?
Suggestion: Could the WeatherCaster manual describe how to best adjust the compass damping coefficient?
PB150 / 3-axis Accelerometer
Question: Read on panbo.com “The PB200 differentiates itself from past versions and competing mast head sensors by incorporating a 3-axis accelerometer and internal motion correction software able to measure and correct for the motion of the boat bouncing underneath it.” Does this apply to the PB150 as well?
Suggestion: Could the WeatherCaster manual describe how to best adjust the pitch/roll damping coefficient?
PB150 / Wind and meteorological sensors
Question: The Furuno WS200 manual says; “NOTE: Do not use wind data in the WIND mode of an autopilot, because the data is not sufficiently accurate.” This seems surprising as the apparent wind figures taken from a sensor with no moving parts and corrected for pitch/roll are quite likely to be far more reliable than those taken from a traditional mechanical wind vane. Can you explain why it is not advisable to use the data with the autopilot?
True Wind Speed and Direction
I have tried to get my head around the true wind calculation as it is not totally clear in the manual and here is what I have come up with.
To calculate the true wind we need to know the speed and possibly the direction of the boat:
The speed of the boat
* Needed for true wind relative to the bow
* Needed for true wind relative to the compass
SOG from a GPS (VTG or RMC)
If no external VTG/RMC signal is present the PB150 will use the SOG as calculated by the internal GPS sensor.
PB150 can also calculate the true wind relative to the boat speed through water using an external VHW sentence. The assumption is then always made that the course and heading is the same and the true wind calculation is relative to the bow.
The direction of the boat
* Needed to true wind relative to the compass
HDG from a compass
If no external HDG signal is present the PB150 will use the HDG as calculated by the internal compass.
However it can also be configured to use the COG as supplied from a GPS (VTG or RMC). The external value will be used if present, else the internal GPS sensor is used.
Question: Am I correct in assuming that only the SOG is needed for true wind relative to the bow?
Here is a formula for calculating the true wind relative to the bow:
http://www.sailingusa.info/true_wind_calculator.htm
VHF interference
My VHF antenna is approx 50cm from the PB150 and I have noticed interference in the form of a ticking background signal when receiving VHF calls, and fellow sailors commenting about a background noise when I transmit using the VHF. The manual states that the VHF antenna should be at least 1m away but that is rarely if ever possible on a masthead. Is this something Airmar is investigating and do you have any comments on this?
My conclusion regarding PB150 on a sailing yacht
The internal GPS does not supply smooth SOG/COG figures at the top of a mast, but when an external GPS is present in the NMEA string it is not used anyway.
When viewing true wind relative to the bow of the boat only the speed of the boat is needed (SOG or STW). SOG is reliably supplied by an external GPS (VTG or RMC).
The internal compass is 2-axis only but it not really needed if you are only interested in the true wind relative to the bow, and if you want it relative to north the best option is to use an external Rate Gyro (HDG).
As a wind sensor only on a sailing yacht the PB150 seems to perform better than any mechanical wind sensor currently available. It also offers a backup GPS, barometric pressure, and air temperature.
One issue for sailing yacht is that the PB150 does interfere with the VHF signal when mounted less that a meter from the VHF antenna. It is difficult to mount them that far apart at the masthead.
A few comments, Sybaris:
* The PB200 does have more motion sensors than the PB150.
* The PB stands for “Power Boat”; Airmar has never marketed either of these multi sensors for installation on top of sailboat masts.
* However, Dan Corcoran, who wrote this and the proceeding PB200 entry has had good results using its wind angle data for his autopilot:
https://panbo.com/archives/2009/02/sailing_with_an_airmar_pb200_.html
* I too am surprised by that Furuno caution about wind angle accuracy.
* Dan wrote about the complications of “True” wind calculations here:
https://panbo.com/archives/2009/10/airmar_cs4500_part_ii_reliable_true_wind.html
Sybaris, please keep us posted about any response from Airmar, especially reagarding:
– ability to disable the internal GPS
– ability to disable the internal compass
– which part of the PB150/PB200 is causing the ticking noise on the VHF (GPS, compass, wind instrument)?
– if I invest significant effort and money to keep 1 meter distance between the VHF antenna and the PB150/PB200 at the masthead, can I be sure to have no problem with interference?
Dan do you have any update on your Part III posting? I am moving forward with I believe the Furuno WS 200, and am eager to hear about your next update for sailboats. 🙂
In the latest PB150 technical manual, there is a very small but interesting revision: Under received sentences, it now shows the PB150 as accepting HDG and HDT sentences, in addition to VHW and various proprietary commands.
It further states the external heading signals will supercede the internal compass. To me this implies that an autopilot or other fluxgate located in the cabin could send a signal to the masthead that would be far less sensitive to heeling errors, and I’m going to try it as soon as my boat is back in the water this Spring.
Backstory: The original PB100 accepted both external heading and GPS signals–which superceded the internal GPS and compass–to provide greater accuracy.
Thank you for your interest, it will move Part III along sooner. Part III includes a video illustrating the stark difference in Apparent Wind Angle display I enjoy with the motion correction feature of the PB200 in choppy seas.
I do first have to sort some stuff out with the loss of 1/2 our home in a fire and write also about some neat gear I tested on the water during a great season of sailing that included a sail to Camden (and a special visit to Gizmo).
There may also be something to write about in regards to some gear that still operates post (home) fire, despite heat, corrosive smoke and water damage.
Until then your welcome to contact me offline about the PB200.
My experience with the similar Airmar H2183 is that the autocalibration routine usually don’t work very well and that a custom calibration is more than desirable. See my report here:
sailboatinstruments.blogspot.com/2011/01/gyro-compass-calibration.html
So how do you program the deviation into the H2183?
Merlin seems to be adding his calibrations to a custom microcontroller that he’s built his instrument system around. Not for the faint hearted!
http://sailboatinstruments.blogspot.com/2011/01/designing-custom-sailboat.html
In the system that I describe, the deviation correction is applied after reading the H2183, before using the heading value in the calculations and sending it to the display. You cannot actually program your own deviation curve in the H2183, but it would be nice to be able to enter your own deviation coefficients (A,B,C,D,E). A revision to the H2183 firmware and to the WeatherCaster software could do the trick.
I have been sailing in the Red Sea for three months now with the Airmar PB150 installed at our masthead and here is my updated feedback.
Wind sensor
As a wind sensor, on a sailing yacht, the PB150 is absolutely brilliant. It certainly performs much better than any mechanical wind sensor I have ever used. The internal 3-axis accelerometer does a fantastic job at smoothing out the apparent wind readings even in heavy seas with the mast moving extensively.
Look at this short video clip to see how stable the reading is while sailing downwind in about 20 knots of true wind.
PB150 wind reading
GPS receiver
The internal GPS receiver does not supply smooth SOG/COG figures and being at he top of a mast might make it even worse, but when an external GPS is present it takes priority anyway. Having said that, I have found that all GPS readings need to be smoothed or averaged on a moving boat regardless of where the antenna is positioned. You can run a test yourself by laying a handheld GPS next to you while sailing and looking at its reported SOG and COG. The internal GPS receiver is however very useful as a backup.
Look at this short video clip to see the SOG and COG on my Furuno chartplotter when I use the PB150 as my GPS source and you will agree that the readings are not useful for navigation.
PB150 GPS reading
It would be great if Airmar could use the 3-axis accelerometer to smoothen out the SOG and COG as it does with the wind readings but I don’t know if that is possible. It would be interesting to know if that is done on the PB200.
Compass
The internal compass on the PB150 is 2-axis only. However the compass is not needed at all if you are only interested in the true wind relative to the bow. If you want true wind relative to north (to simulate a fixed weather station while on the way) your best option is to use an external Rate Gyro (HDG) installed low and central in the boat. The PB200 does have a 3-axis compass but as it is positioned at the masthead I don’t think it will be as precise as a separate and properly installed rate gyro anyway.
VHF interference
There have been some comments about VHF interference caused by the PB150/PB200 being installed at the masthead very close to the VHF antenna. Having used the VHF/PB150 combination daily at sea for about 3 months now, I cannot report any interference. I think my earlier recorded problems might have been due to the proximity of large land based relay antennas.
Summary
My PB150 is connected to a Advansea S400 wind display. The PB150 supplies excellent apparent wind figures via the NMEA interface and the S400 calculates its own true wind speed/direction using the apparent wind supplied by the PB150 and the SOG supplied by my Furuno GPS.
Apart from being a wind sensor it also offers a backup GPS signal, barometric pressure, and air temperature. It is easy to install and it is not damaged by large birds (a common problem in the Red Sea with numerous ospreys).
My assessment is that the PB150 works very well as a superior wind sensor on sailing boats.
You can read my full report to Airmar here:
Feedback
This article is by far the most active and helpful discussion on the web regarding ultrasonic wind instruments. Unfortunately, it has been dead for over a year! Where are all the reports from early adopters? Where is all the real world feedback?
Oh, and when will the price start to come down?
Harry
LCJ Capteurs in France is still innovating. They have a small, solar powered, wireless ultrasonic windspeed sensor.
http://www.lcjcapteurs.com/ultrasonic%20wind%20sensor%20CV7%20CV3F.htm
The documention mentions a Canbus option, whatever that means.
The magic of ultrasonic wind instruments has not been fully dissected for us consumers. BUT…the maritime meteorologists have long abandoned vanes for ultrasonic sensors. They have detailed technical analysis of the behavior of vanes and ultrasonics pitching and rolling and are opting everywhere for ultrasonics.
That being said, there are serious errors in our understanding of the two primary ultrasonic wind instruments sold in the USA – Airmar PB200 and Maretron. They do seem to output “better?” wind data i.e. smoother but it is not because of smart processing.
Airmar’s unit specifically does not correct for pitch and roll – but it seems there is less artifact due to pitch and roll. I have used ultrasonic sensors since 2008 (more to follow in another thread).
Maretron’s unit is simpler – but has a slightly different geometry to its slot.
I think both ultrasonic sensors contribute to a smoother autopilot performance when steering to wind direction in a quartering sea. I think a unit correcting for pitch and roll (the B&G and NKE’s process in their computer at much greater $ cost) probably perform better – but the jury is out.
I quote ” The PB200 uses a yaw rate gyro to stabilize the 3 axis heading sensor. The stable heading sensor is then used to calculate true wind. This is why the PB200 works much better than the PB150 which only has a 2 axis compass and no rate gyro. We are aware that the wind data will be more accurate if we also used pitch and roll data in the calculation, but it is not a simple value to add. We must first collect data and create a curve correction which involves many variables, including pitch, roll, wind speed and wind direction. The amount of variables made this more complicated than originally anticipated, so it was never developed for the PB200.”
Here is hoping a PB300 brings pitch and roll corrections to the masses!
You can download our new documentation “water sport”
http://www.lcjcapteurs.com/fichierpdf_lcj/LCJ_Capteurs-Documentation_3sheets_GB.pdf
We equip with the sailing ships of competition with power stations B&G (with a special interface) or NKE.
The interface “CanBus” will be available end June (in Europe).It will measure the atmospheric pressure.
I have used a PB200 at my mast top for this season. Before ordering, I tried to get answers to a number of questions from Airmar but never got a reply. I ordered anyway and found out the (not so) hard way.
These are the questions and my own answers to them:
1. Can I use an Actisense NGT-1 USB that I already own to configure the PB200 and update it’s firmware with the Weather Caster software and avoid having to purchase a separate adpater from you just for this?
Yes, I configured the PB200 as well as updated it’s firmware using Weathercaster with my Actisense NGT-1 USB.
2. Can I permanently disable the compass in the PB200 (I have a H2183 much better located for stable heading)?
I don’t think that it can actually be disabled but it’s output on the N2K bus can be disabled (which is almost the same thing) by setting the update frequency to zero in Weathercaster.
3. Can I permanently disable the GPS in the PB200 (I have multiple GPS outputting NMEA2000 and NMEA0183 with antennas at deck level, better suited for stable COG and SOG)?
same as 2.
This is a very important feature for me, at least at the moment, because Coastal Explorer, which I use as my only chart plotter, does not have a provision to filter sources coming in on the same port. It has a full set of methods to select which GPS to use but these are per port, assuming that there is no more than one GPS on each port. As the NGT-1 and therefore the whole NMEA2000-data is considered a single port, I get a jumping boat and jumping predictor line. Actually, I still have this problem because a Simrad NSS7 that I have and use for several functions other than chart plotting has an internal GPS that can’t be disabled. I am fighting that problem by having covered the whole back of the NSS7 with a triple layer of aluminum foil to prevent it from getting a fix but this only works most of the time (I can’t quite cover the front, too). My Simrad AC12/AP24 autopilot has no problem because it allows to select the GPS to use and, ironically, neither has the NSS7. It happily ignores it’s own rotten fixes and uses those of my Simrad GS15.
So at least I don’t have to cover the PB200 at the mast top with aluminum foil 😉
4. What should I aim for when locating the PB200 re:
– horizontal distance from the VHF antenna(s)
– vertical distance from the VHF antenna(s)
– positioning forward of the mast for accurate wind direction and speed
This was triggered by reports of a ticking noise in the VHF caused by the PB200. I put the PB200 on a horizontal pole extending about 60 centimetres (2 feet) forward of the mast, giving me clearance from the VHF antennas of abount 80 centimetres, less than the 1 metre mandated in the installation guide. I have no ticking noise and no sort of interference between anything at the mast top.
5. Running the PB200 cable up the mast is a significant job. I have read about cable related problems with the PB200 (such as here: https://panbo.com/archives/2011/01/nmea_2000_bridges_2_jeremys_experiments.html). If I find mid season that the cable is faulty, then, if I were to contract the job, it will cost way more than the PB200 to replace the cable as this requires unstepping and stepping the mast and retuning the rig.
What can I do to avoid any cable related problems with the PB200?
I used the regular combined NMEA2000 and NMEA0183 cable that is available im 30 meter length. After ordering the wrong one first, the second cable had a reassuring blck shrink-tube-sign near the connector saying something like “this connector has internal termination resistor”. To protect the exposed cable from the sun and weather, I covered the exposed part with black heat shrink tubing. So far, all is well. I had the PB200 fail suddenly one time this season (updates on all data stopped). My heart sank when I noticed it, fearing a cable-related problem. It would’n come back up after I power-cycled it. But the next morning, all was well again and I never had another problem since. The was a thunderstorm approaching when it stopped. Could that have been the reason?
6. I would like to position the breakout box at the nav station rather than below deck near the maststep. Do you recommend this? Can I open the combined cable at the maststep to include connectors to make unstepping the mast easier?
I ended up not using the supplied breakout box because of space constraints and broke the cable open at the mast step below deck. I have used screw terminals and this has given me no problem.
Hi Henning,
Thanks for the update on your PB200.
Any tricks to using the Weathercaster s/w through the NGT-1 rather than Airmar’s gateway? I have both but would really only like 1 connected.
We’ve had our PB200 installed for about 18 months now, but haven’t done a lot of sailing in that time: about 600nm.
The boat’s been out of the water for the past 6 months under-going an extensive internal refit (new galley, chart table, saloon remodelling,……, and a rewire using BEP’s C-Zone distributed N2K power network which I am going to install over the next 2 months now that the carpentry has finished).
We found the PB200 to be excellent, and loved that it plays nicely on the N2K network.
We struggled a bit at first with getting the calculated true wind to display regularly on our Maretron DSM250 displays, but with the help of some of the posts and forums here, figured out that it was a data source issue – both the PB200 and the DSM250 were doing the calculation. We disabled the PB200 true wind broadcast, and that seemed to work.
We also found the heading data was sometimes a bit odd (bounced around), but again that was traced to a data input conflict and just took defining what we wanted displayed to clear it up.
We’re going to float the boat again towards the end of the year, so I’ll post an update once we have everything back together.
Cheers,
Paul.
Paul:
I have the NGT-1 talking to Weathercaster – no tricks required as I recall.
Regards,
Ted A
s/v Little Wing
Thanks Ted. I’ll try it when we power up next (currently there’s no wiring or power on the boat at all as we stripped it all out – huge job).
Cheers,
Paul.
re the NGT-1: same here; it works straightforward with Weathercaster. It appears in a dropdown to select the device to use.
Please note that Airmars N2K to USB interface actually is a version of the Actisense gateway.
Airmar has replaced the PB200 with the WS-200WX. The specs are mostly the same. The GPS goes from 1 Hz to 10 Hz, the power supply goes from 9-16 V to 9-40 V, with 50% less current draw. The specs don’t give the N2K LEN value, but it should now be 2. It goes from having a 1 axis rate gyro to having a 3 axis rate gyro.
http://www.airmartechnology.com/uploads/Brochures/WX%20Series%206%20page%20Brochure%20FINAL%20printer.pdf
Interesting development – I see that they also have versions with a heater in them for cold weather.
It’d be nice to know how much the 3-axis actually improves the data from the PB200 – anyone want to buy one to mount along-side their PB200? 🙂
The other big question is whether they use the same cable as the PB200. If anyone upgrades, it’d be a pain to have to run another cable. Anyone know the answer to that?
Cheers,
Paul.
The installation manuals for the Airmar weather instruments (old and new) and Airmar heading sensors specify the same cable part numbers for all, with the exception of the weather instruments with heaters.
Please note new website in english for LCJ Capteurs ultrasonic wind sensor!
http://www.lcjcapteurs.com/?lang=en
I am exploring the idea of getting the WS-200 WX and the new Garmin GMI 20 to mount on my monohull with a 62 ft stick. I already have an Airmar triducer and Airmar hdg sensor talking to a Garmin 4208 plotter via NMEA 2000. I’m having difficulty finding anyone with the WS-200 currently on board a sailboat with recent experience to talk to.
I’m outfitting a new boat this spring. I’ll have a Airmar H2183 compass. My interpretation of this thread is that I will have equally good wind measurement performance with the Airmar 100WX (no accelerometer or compass) as with the Airmar 200wx because the H2183 provides the other information.
Does anyone believe that I am incorrect?
I tried calling Airmar and the tech didn’t seem quite sure.
There is a WX entry for Panbo that will be ready shortly, but I couldn’t help commenting now.
The 100WX version of the product is for stationary installations (stated in the brochure), and is absent accelerometers. Without them, you loose most of the benefit I wrote about in these entries, mostly limiting the benefit to having a sensor with no moving parts for birds to damage.
Do you have a sailboat? IMHO there is a huge benefit to the 3-axis accelerometer in the 150WX and 200WX for sailboat applications. The accelerometer is used to correct the wind measurement in the WX for mast motion, the primary reason for my great admiration of this product. There is a WX-200 review in the works, to which the WX-150 is very similar, watch for it here soon.
You can still pair a WX-150 to an H2183 solid state compass on your boat hull, which gives a much better heading reading in my experience. Just disable the heading output of the WX with the WeatherCaster software (or maybe find an Airmar distributor willing to disable it for you before shipping ? … necessary if your boat displays or MFD don’t have a feature where you can select a specific NMEA 2000 source)
The G2183 now has some stiff competition. Check out these inexpensive sensors that Ben wrote about on Panbo last year.
https://panbo.com/archives/2013/02/navico_new_gpsheading_sensor_vhfgps_handheld.html
It seems to me that each function needs a dedicated sensor. The wind sensor measures wind and the compass sensor gives a heading. The wind sensor gives good results when it is mounted on the mast head, with a long arm to get it out of upwash effects and perturbations from other masthead equipment. The compass sensor gives good result when it is mounted as close as possible to the boats gravity center, which happens to be rarely on top of the mast, does it?
Placing a compass sensor in a wind sensor is a non-sense to me for a use on a boat (unless it is a rib). A complete unit including wind sensor and compass all in one makes sense only for mobile land use to give the north alignment to the wind direction. The Airmar unit is more a weather station unit than a sailing boat’s wind sensor and it is advertised so. There are some other sensors fully dedicated to wind measurement on sailing boats (small and light sensor with long arm) ; see for example http://www.lcjcapteurs.com
Hi Olivier,
I think the point is more the motion sensors than the compass. Traditional wind sensors can not correct themselves for mast motion, which is why grand prixe gear like the B&G Wave processor use down below motion sensors to correct wind data.
Actually, motion sensing is changing compasses too, as in the Raymarine “9-axis” Evolution autopilot sensor. Ray claims that its heading performance is very good even when mounted high on a cabin top — and I saw good results on my flying bridge last summer — but most Evolution installs I’ve seen had the sensor down low. Change is hard 😉
The PB200 does not use ‘motion sensors’ (accelerometers) to correct apparent wind direction according to Airmar in 2009. There are other reasons why the ultrasonic sensors work better.
The PB 200 does use the accelerometers to correct the compass readings which are then used to calculate ‘true’ wind. However the considerable motion at the masthead really degrades the compass readings, and I believe at the end of the day it is best to use a compass closer to the center of gravity.
Motion (accelerometer) sensors for correcting all these parameters for pitch, heel and yaw are the wave of the future. But it is not here – unless Airmar has changed something without announcement during the last two years.
With some luck and persistence I received their comments directly and in writing in an email from airmar. I have confirmed with some engineering types that they are indeed correct that they need a fair amount of research to develop an algorithm that reliably corrects apparent wind direction accurately.
Airmar was aware that sailors want a better wind heading to provide better autopilot boat control. That said – they have in the past four years NOT developed that algorithm They said in 2009 quote:
“The PB200 uses a yaw rate gyro to stabilize the 3 axis heading sensor.
The stable heading sensor is then used to calculate true wind.
This is why the PB200 works much better than the PB150 which only has a 2 axis compass and no rate gyro.
We are aware that the wind data will be more accurate if we also used pitch and roll data in the calculation, but it is not a simple value to add.
We must first collect data and create a curve correction which involves many variables, including pitch, roll, wind speed and wind direction. The amount of variables made this more complicated than originally anticipated, so it was never developed for the PB200.”
My masthead installation has improved my autopilot performance when sailing with ‘true wind’ as the pilot reference. I have used both a Maretron WS100 (without accelerometers) and an Airmar PB200 ultrasonic (which does not use its accelerometer for apparent wind direction) and both improved performance over the Raymarine and Simrad wind vanes when coupled with my Maretron SSC200 compass nearly at the boat’s center of gravity and with the Simrad AP28 autopilot.
I would love to see real lab data comparing ultrasonics, and I appreciate that the Panbo regulars have done a splendid job demonstrating categorically that the ultrasonic wind instrument yields higher quality control.
But the answer is not really in as to why, and the nuances of the built in algorithms corrections is really difficult to compare.
Thanks everyone.
Airmar’s comment (the wind data will be more accurate if we also used pitch and roll data in the calculation, but it is not a simple value to add) might be valid for a wind sensor, but it would not be hard for an App to calculate it from an NMEA stream).
grandsoleil: I, too, would be very interested in hard facts and measured comparative data. I do not dispute the accuracy of the email you quoted but this certainly contradicts my understanding so far and, if this turns out to be correct, negates the reason why I bought the PB200 in the first place.
I think that I am representative of several sailors in that I:
– have the PB200 mounted at the masthead (for which it is not well suited, resulting in significant effort and costs higher than that of the PB200 itself to mount it properly, extended in front of the mast)
– don’t need weather data except wind (I have a barograph below decks and if I want to know the air temperature, I step outside and I am not even quite sure of the concept of a dew point)
– don’t need another GPS (I have several, one with 5Hz update rate, mounted in far better suited position than the masthead)
– don’t need another compass (I have an Airmar H2183, mounted below the cabin roof by the mast step, the output of which I like pretty good)
– have, with my previous Simrad wind sensor, never had problems with bird damage
So I want wind, the whole wind and nothing but the wind.
Consequently, in weather caster, I have turned off all data except:
130306 Wind data
130311 Environmental parameters
130323 Meteorological station data
130880 Proprietary: additional weather data
Measuring wind on a sailboat does not make sense at deck level because here the wind is deflected in unpredictable ways by the boat and, even if that weren’t the case, knowing the wind direction and strength just above the water does not help with sail trim which is affected by the wind at about 10 meter height.
So the wind needs to be measured at the mast head. However, any device measuring wind at this place is affected by the motion of the masthead which moves the measuring device around.
Getting around this problem is the only reason why I (and probably many other sailors) am interested in the PB200.
In Dan’s original entry — https://panbo.com/archives/2009/02/sailing_with_an_airmar_pb200_.html — he says:
“The PB200 differentiates itself from past versions and competing mast head sensors by incorporating a 3-axis accelerometer and internal motion correction software able to measure and correct for the motion of the boat bouncing underneath it”
which I understand to mean that the PB200 does address the problem of the moving sensor and outputs wind data corrected for the motion of the sensor. I think this is possible only by measuring the motion of the sensor – with accelerometers.
The question of whether this function is provided by the PB200 has, I believe, nothing to do with any kind of compass correction that it may also provide because a compass only gets involved when calculating true wind (any flavor) and the problem of a moving sensor manifests itself even with just the apparent wind.
If a sailboat is tied to a dock in absolutely no wind whatsoever and if a power boat passes by ignoring the no wake zone, causing the sailboat to roll, then the Windex at the top of the sailboat’s mast will flap from side to side which clearly is incorrect information because there is no wind from any direction.
A measuring device as I want it would show no wind from any direction even while the sailboat is rolling from side to side and this would not simply be accomplished by damping.
This is really the only question. Either it does or it doesn’t.
Now, having sailed with the PB200 for several seasons, I would dare to claim that it does do the above – contradicting the information in your email.
In several seasons over several thousand miles of sailing and motor sailing I have many times, often in low wind situation in ocean swell, seen my Windex swing around wildly while the digital wind needle on my Triton, driven by the values from the PB200, stayed put or moving only be a few degrees.
At the same time, I believe to see the wind needle respond to changes in boat or wind direction quickly (no lag or a lag of less than 1 second).
Having had less than perfect success with emails to Airmar, though on different subjects, could Dan or Ben maybe address them to finally get factual information about this question that has been raised many times and apparently never settled, here and in other forums?
1. Does the PB200 provide apparent wind data corrected for motion of the sensor and if so, how?
2. If it does not, what would be causing the seemingly accurate output that many users experience?
The CV7 from LCJ Capteurs does not, as far as I can see from the documentation, provide this correction. Putting just the wind sensor up at the masthead and using tolerant NMEA0183 communication through the mast is otherwise a very valid concept. Maybe users of this sensor use another type of motion correction (via “race processors”?). I would also be interested in details about this.
Well, I’m pretty confused!
But hopefully Dan will weigh in, and I believe he’s had recent contact with Airmar. We’ll get to the bottom of this hopefully.
I have the PB150 at our masthead and agree that the wind measurements are very smooth compared to any other wind sensor I have used before, and the reason is that the output is corrected (smoothed) for the mast swing.
However, the GPS signal is useless up there and is not corrected (smoothed).
I wrote a lengthy entry (see above) on March 11 2011 – It starts with “I have been sailing in the Red Sea”
Have a look at the two videos I added to my earlier message.
I also wrote a long report to Airmar (see link above) and the only response I ever got was this:
Hi Per,
Thank you for contacting Airmar Technology, and thank you for the feedback documentation #2. We are happy that the PB150 is working well for you on your vessel. We will review this and also pass this along to our engineering and product development team as we are currently at work on next generation weatherstation products.
Best regards,
Airmar Support/Sales (11 March 2011)
Henning & Sybaris, Thank you for writing here about your experiences with the PB200, as well as in earlier comments. Your correction of Grandsoleil is spot on. In fact I agree with Henning word for word. Sybaris does exactly as I do with the GPS, disabling the output.
Here is the answer to what Henning asks “could Dan or Ben maybe address them to finally get factual information about this question that has been raised many times and apparently never settled, here and in other forums? 1. Does the PB200 provide apparent wind data corrected for motion of the sensor and if so, how?”
My answer is unwavering based on telephone interviews of three people at Airmar (I provided the names to Ben as background material at the time I wrote the entry)
The answer is a resounding YES, the apparent wind is corrected for mast motion, by the 3-axis accelerometer (e.g. the compass has nothing to do with it)
Furthermore as Sybaris observed, the GPS output is not compensated, it is the raw value from the GPS receiver. Although one would think it need not need compensation as lat/long isn’t much changed by even a six foot motion of the mast, it would be helpful if the COG and SOG output was compensated because without such a chart plotter providing a navigation line based on COG wavers all over the screen in lumpy seas. Because COG and SOG are not corrected, the COG line dances all over my chartplotter map view, so I instead turn off the PB200 GPS(just as Sybaris describes) and use a different GPS on my boat.
Respectfully Grand Soleil, in regards to this product you are incorrect. What will it take to believe three of us that own the product?
Tank you, Dan, I am happy to hear this.
And most likely grandsoleil is happy to hear it, too. He is, in fact, just quoting from am email that he received from Airmar which was incorrect at the time it was written or has since become incorrect.
However, when I re-read the mail, maybe it isn’t incorrect after all:
“The PB200 uses a yaw rate gyro to stabilize the 3 axis heading sensor. The stable heading sensor is then used to calculate true wind.”
OK, so the compass output is corrected for motion. This is not very relevant as the heading information is only used for true wind direction, not true wind angle, but fine.
“This is why the PB200 works much better than the PB150 which only has a 2 axis compass and no rate gyro.”
The PB150 and PB200 both seem to work very well regarding the apparent wind angle and consequently, the true wind angle. It could be that the true wind direction of the PB200 “works so much better” than the PB150 but who cares?
“We are aware that the wind data will be more accurate if we also used pitch and roll data in the calculation, but it is not a simple value to add.”
I had understood this to relate to the question of motion correction but when re-reading, I now think this only refers to correcting for the angle of attack of the wind relative to the wind sensor.
All wind sensors have errors when the air does not move parallel to their plane of measurement. If the boat is heeled, the plane of measurement (i.e., the plane in which a Windex can move) is tilted while the wind is still blowing parallel to the ground. This introduces an error which could be corrected, but, according to this mail, is not in the case of the PB200.
Note that this has nothing to do with dynamic movement, just with the measurement device being tilted relative to the wind.
I seem to remember from a B&G document linked to in the recent entry on the B&G race processor (https://panbo.com/archives/2013/12/bg_h5000_tempts_my_racing_heart.html) that that processor corrects for (static) roll and pitch. This would be something easily done from a box located below deck because it just requires a gravity sensor providing roll and pitch in addition to the wind data supplied by the sensor at the mast head.
I have trouble imagining how the motion correction that we are interested in would be accomplished from a box below deck (when there are no accelerometers in the wind sensor). The box below deck would have to calculate the movement of the wind sensor 70 feet above the box. At the very least, one would need to enter the height of the wind sensor above the center of gravity and how would you determine the exact location of the center of gravity in your boat?
“We must first collect data and create a curve correction which involves many variables, including pitch, roll, wind speed and wind direction. The amount of variables made this more complicated than originally anticipated, so it was never developed for the PB200.”
Note that these are exactly the values needed for the static roll and pitch correction.
Note also that acceleration (as in metres per second) is not listed but would certainly be needed for the motion correction that we all are interested in at the moment.
On the topic of correcting COG and SOG:
– I can attest that even a deck-mounted GPS is producing massive fluctuations in COG and SOG in ocean swell.
– I am also very much interested in reducing these fluctuations in order to get a useable predictor line on the chart plotter. So far, mine (Coastal Explorer) is not really useable. On the CE support forum, many are asking for a settable damping value.
– This is from the new feature list of the recent Simrad NSS software release (as read on Panbo): “Configurable filtering for GPS COG and SOG to smooth fluctuations in received data from sensors”
– More so than in the case of wind angle, fluctuation in COG and SOG can, in my opinion, be combated by simple damping.
– My perception of NMEA 2000 instrument behavior seems to be that such damping would be in the domain of the instrument reading and displaying the value, not the sensor generating it. I believe this because it also seems to be accepted practice to put any and all data, however bad, on the bus and expecting potential users of this information to make sure it isn’t used. This is not to say that I agree with this practice.
– But, yes, correcting GPS-derived COG and SOG for motion of the sensor (measured by accelerometers) would be the holy grail. I think this would be pretty involved, though. One would need to marry a position sensor with a motion sensor. Before the advent of GPS, for airplanes, there used to be inertia-based positioning systems which were surprisingly accurate (I think the WW2 V2 rocket had one of these). Probably the biggest problem would be how to re-align the position provided by the satellites with the position computed by the motion sensor. You wouldn’t want to have the motion-corrected position being 2 miles off the GPS-based position even if that gave you very smooth COG and SOG.
So if I were to direct the (apparently very scarce) Airmar development resources, I would probably put them on some of the more pressing issues first (if you are reading this – I can make a list).
Henning: “On the topic of correcting COG and SOG:
– I can attest that even a deck-mounted GPS is producing massive fluctuations in COG and SOG in ocean swell.”
I agree 100%. Bringing a GPS to deck level doesn’t automatically solve the problem.
Having said that I have to report that my Furuno GP-320B (antenna) coupled with my Furuno 1724C (chart plotter) does manage to give an almost perfect predictor line, so it is actually possible. As a side note, it did it exactly the same before and after I installed my rate gyro for the autopilot.
I posted a video earlier in this thread (search for Red Sea) showing my plotter screen and how the predictor line swings back and forth when connected to the PB150 GBP. I should have made one more showing how that same predictor line is almost perfect when using the GP-320B antenna. The video was recorded in very rough weather going downwind in big swell so the boat was moving a lot. That makes the first video showing the wind gauge connected to the PB150 all the more telling as to how perfectly stable it reports the wind direction and wind speed in those same conditions. You can imagine that the masthead was moving quite a lot. Hence, as a wind sensor I think the PB150/PB200 is as nearly perfect as you can get (not discussing the true wind) and I am surprised this is not widely known in the sailing world.
Please give grandsoleil a break. We believe you that the PB200 gives great wind readings, especially in comparison to mechanical wind sensors. What we do not know is how it does it. The idea that the reading is compensated by the motion sensors is reasonable, but we don’t know for sure and some Airmar reps don’t seem to know either. Airmar’s marketing doesn’t match up with their engineering. I would expect a valuable feature advantage like this would be promoted.
In the early years of this posting there were experiments comparing the PB200 and an ST60 mechanical vane. As far as I know, nobody has done any direct performance comparisons between any of the ultrasonic units, so we don’t know exactly how much the motion sensors improve the readings.
It should not be assumed that the motion sensors need to be at the top of the mast either. The output from sensors at the bottom of the mast can easily be used to determine the motion at the top of the mast, given the mast height. Not having both sets of sensors in the same unit may mean that those corrections are left for the display to calculate though.
Finally, “too hard” is always relative. There is usually some simpler approximation which is “good enough”.
Maybe Ben can get a definitive answer about mast movement corrections on the PB and WX series from Airmar.
Thank you for all your inputs. It seems that my safest route forward is to get the 150wx as it is not that much more expensive than the 100wx and may indeed use the masthead accelerometers to increase the wind reading accuracy.
Assuming that Dan is correct, it is unfortunate that Airmar didn’t release a 130wx model that has the accelerometers but not the GPS/compass.
Ben, I would also be very appreciative if you were able to get someone technical enough in Airmar to put this argument to rest – including the related example of whether a 110wx plus a GH-2183 might be a better overall sailboat solution than a 200wx.
Ok Everyone. A phone call is all I have to report (apologies, I prefer written statements but this is what I could get).
There are many reasons that make the Airmar 200 WX a superior device for wind inputs on a sailboat. First, it is not a mechanical vane affected by mechanical friction and gravity – mass effects. Second it uses computer software algorithms to create accurate ‘raw data’. i.e. in digital sampling there is no such thing as a raw analog curve.
The one thing WX does not do to improve wind accuracy is put pitch and roll into the algorithm that corrects raw Apparent Wind. It does use this data for compass heading corrections.
I wish this will put things to rest – but I presume it won’t.
I have just spoken – no it is not a written statement – but a long conversation with the product manager who reiterates what was written several years ago is still valid.
I have learned several interesting things explaining and supporting the excellence of their product (but probably I am not clear enough on the differences between the WX models to recommend which is the one to get at this point for any one sailor).
The WX200 now samples at 32 hz (i.e. data is collected 32 times in one second).
They are now using software algorithms which are much more sophisticated than using dead band or averaging, to eliminate outlying data points. This type of data massage increases accuracy substantially. Academic Federally sponsored research routinely uses these very sophisticated sampling error correction techniques . It matters not if one is at Stanford, Columbia, MIT, Princeton, Yale or Northwestern or elsewhere, this is what state of the art data analysis entails.
Airmar’s product manager told me that they did perform a wind tunnel preliminary study on the errors produced by tilting their device. The simple answer is that they did not see enough error to make this a priority investment.
The better explanation is that they believe that with a dynamically tilting moving device, their other algorithms eliminate a significant portion of the error. So what is clearly a large error in other simple mechanical devices is not with their device. They do agree that data would be better – but not worthy at this point for a significant priority over other better ways to correct data. I have been here before in research – thinking in an analog way I have argued for more precise measurement in the medical environment (and I have been both an FDA and NIH funded federal consultant) but have been reassured that digital analysis is the way to go.
I am told the latest WX iteration will have accuracies an order of magnitude better than those of several years ago.
Simply – buy the best you can afford. The WX is up there.
Thanks Grandsoleil, that explanation does sound reasonable to me. Whatever magic they do (algorithms) I am more than happy with my very stable apparent wind speed and direction as reported by my PB150 (as seen in my video).
Just wishing (dreaming?) here it would be nice if they would offer a firmware update to bring the older sensors up to their latest algorithms.
Cheers,
Per
And the Final Answer on the PB200 …
… follows after I first thank Irene Robb of Airmar for evaluating video and graciously fielding questions from Grandsoleil and I, and as well, thanks to Grandsoleil for his insightful sensor engineering discussions with Irene Robb, Ben and me.
The answer, provided courtesy of Irene Robb, WeatherStation Business Development Manager, who answered questions and reviewed video of the steady readings the PB200 provided as my mast was swinging in the wind, as compared to erratic readings from a cup & vane sensor.
In regards to the apparent wind measurement in the video, Irene responded, “The PB200 takes wind readings 8 times per second, but filters the wind data which acts similar to an average over a few seconds. The end result is you won’t see flutter or turbulence in the final reading because it’s filtered out. It’s as simple as that.”
The results that I and other PB200 users observed suggest that “acts similar” is an over simplification of a pretty sophisticated filter, as the PB200 is very responsive to wind direction changes, while holding steady when the boat bounces. I will share the video at some point in the future after I update the YouTube annotations.
For True Wind (Relative to Earth, e.g. not Sailors Wind) Irene added, “The only place we use the tilt data is in the heading calculation. A 3D Magnetometer, 3D accelerometer and a 3D rate gyro are used in combination to provide what we consider to be a very stable compass heading. So even under extremely dynamic conditions our heading is stable. This heading is then used in our vector math along with GPS SOG and the apparent wind to calculate true wind. I believe we are still the only manufacturer to combine these sensors to be able to calculate true wind on the move.”
Again, thank you, Irene and Grandsoleil.
Should anyone desire to comment below, kindly make clear to Panbo readers if you are commenting on Apparent Wind, Ground Wind (true, relative to earth), or Sailing Wind (relative to water surface).
For more on Sailing Wind (relative to Panbo), go to:
http://goo.gl/5w5Thx
Thanks Dan
Impressive.
Re: the 8 second averaging of wind readings. That seems to say the wind direction stability is more a matter of the sample rate and filtering than ultrasonic versus mechanical sensing? In other words, with similar sampling and filtering from, say, a B&G 508 Wind Sensor, the same stability could be achieved?
Paul,
I think you mis-read Dan’s posting. Its 8 samples per second averaged over several seconds, not 8 seconds… I find the PB200 wind remarkably good, even on top of our 105 ft mast in lumpy seas.
Don
Paul, I’m not at all sure that’s a valid conclusion. It does seem that Airmar’s filtering algorithm is quite sophisticated — especially now that we know they don’t use the accelerometers to correct Apparent Wind angle (or claim not to 😉 — but isn’t there a significant difference between how ultrasonic and mechanical sensors respond to motion?
When I see a traditional vane and whirlygig go spastic because a wave or wake made the boat jerk around and there isn’t enough wind power to hold them steady, I think that a lot of what I’m seeing has to do with the weight of the free moving sensor parts. I don’t know for sure but I suspect that mass, momentum, and reaction to sudden changes in momentum have more to do with erratic wind sensor motion than the false apparent wind caused by the masthead’s motion through space.
But a fixed ultrasonic sensor obviously has no moving parts that respond to mast motion. Isn’t that quite important?
May I comment
1-All (meaning practically all) new commercial, military and government wind sensors that are chosen with performance accuracy in mind are now ultrasonic (and manufactured and engineered by several manufacturers). There is an active engineering literature on the subject which has now graduated into discussions of data ‘filtering’ algorithms.
2- Ultrasonic is mechanically superior – immune to some mass/gravity errors that are well documented in the engineering literature.
2a – I suspect, but do not know for sure, that there are some geometric advantages of ultrasonic as they measure with an array of sensors instead of just a single point ( a wind vane is an extension of surface in front and behind a single rotating contact point i.e. it functions in one plane. The Airmar uses four sensors – which link as pairs – which should mean there is data in at least two planes. Think GPS – more satellites, more accurate data.
3 – the whole concept of their ‘filtering’ is way more sophisticated than averaging. Ages ago ‘noise’ was ‘averaged’ out of signals with the assumption that there were equal noisy data points above and below the real event signals. Modern mathematical techniques produce far more accurate data than averaging.
4- In racing B&G and NKE setups, apparent wind data is ‘processed’ in the main system cpu for pitch roll and yaw to yield more accurate ‘true wind’ for high speed sailing auto pilots. It appears to me that Airmar does some of this by a different route: Airmar’s proprietary filtering algorithms filter out a lot of the errors from the pitch roll and yaw – up to about a remarkable 45 degrees tilt they say. That being said there are still more exotic engineered ultrasonic sensors out there – for example – on the America’s Cup boats.
Ultrasonic is state of the art – Airmar has the most sophisticated of the sensors readily available for ordinary sailors – but Maretron and LCJCapteurs make very good sail wind ultrasonics without the the Airmar algorithms and both used extensively on sailboats. Last but not least, Gill offers an array of ultrasonic wind instruments for those with Oracle like engineering capabilities. Rather than watching my money pour out of the pocket for something like that, I am waiting for the trickle down.
Ultimately my sailing errors at the helm will overwhelm the importance of this more accurate wind information, but my autopilot does actually find it easier to sail steady with ultrasonic wind data, with further upgrades my wife will be all the happier.
Hello Dan,
my question is on apparent wind angle relative to the forward direction of the boat.
The one question most important to me and, I believe, to several others, still does not seem to be answered by Airmar or was answered incorrectly or the PB200/WX200 is not as valuable as many of us think it is.
I put the question as follows:
Yes or no, does the PB200, WX200 or any other weather station instrument by Airmar use accelerometers to correct raw apparent wind *angle* data collected by the sensor before sending the data to the instrument?
Any kind of information on if or how the compass part in the weather station is corrected for motion, e.g. using accelerometers, is not relevant for this question. This would only be relevant when discussing wind *directions* which I don’t. I am only interested in wind *angle* relative to the bow.
An answer such as “yes, the weather station uses accelerometers” would not be a helpful answer as this could refer to accelerometers correcting the compass used to calculate the wind *direction* as well as to accelerometers correcting the wind *angle* measured by the ultrasonic sensor.
I will try to explain my question further with a test setup:
If the weather station were mounted on the edge of a disc of, say, 10 feet diameter which is mounted exactly level and which is tuning on a horizontal plane around it’s center at exactly 1 revolution per second and if, using gears of some kind, the weather station would stay aligned in exactly the same direction while it is turning with the disc and if this experiment would take place indoors with absolutely zero air movement, then what wind data would the weather station report?
(This test setup tries to emulate the weather station mounted a the top of a mast with the boat rolling in swell with no wind)
The answer I expect is: no wind at all
If this experiment would take place outdoors with an air movement of exactly 1 knot, the speed of a slow walk, much less than the speed of the weather station moving around on the disc, then what wind data would the weather station report?
The answer I expect is: 1 knot with a steady angle
Maybe Irene Robb has not quite understood the point of “steady” readings versus highly accurate data.
I have very little interest in wind direction, just wind angle.
The wind angle output should be affected by mast movement as little as possible.
Simple damping, in my opinion, is not suitable to achieve this. Many times I have seen my Windex go around in circles, slowly, steadily and for several rotations because of low wind and a lot of mast movement. I don’t see how damping can help effectively with this.
I have recently met a beautiful older Swan 53 with vintage B&G setup. They like to set the autopilot to wind but can’t do this when going downwind across the Atlantic. In the relatively low apparent wind going downwind, the wind angle measured by the older B&G setup is affected by masthead movement so much that the autopilot, when in wind mode, routinely goes into alarm mode and quits steering which is dangerous. The crew cannot safely turn on the autopilot to go trim the sails because the boat may broach or gybe before they have a chance to get back to the wheel.
This is the kind of real world-problem that at least some people are interested in and this has nothing to do with accuracy and nothing to do with any kind of direction but has everything to do with “stable”.
Irene Robb uses the term “filter”. A filter lets some things pass while stops other things from passing. Applied to wind angle measurements, this would mean “send only a selected few of the measurements while suppressing others”. More likely, what is happening is that no measured values are output but instead calculations are performed on all measured values to derive output values. This can be a simple as averaging (damping) but can mean other calculations as well. The big question is whether measurements from accelerometers is one of the inputs to these calculations.
Apologies. I did intend 8 samples per second, over a several second window.
Hi Henning,
I’ve read the emails and according to Airmar, the PB200 does not use accelerometers to correct raw apparent wind angle data.
The quotes from Irene Robb above were in answer the following request from Dan:
“If the PB200 is not using the accelerometers to make a simple math correction for motion (e.g. subtract the vector measured motion from the accelerometers vs. apparent wind from the ultrasonic sensor) then I would like to correctly describe to Panbo readers what is instead causing this effect on the PB200.”
Dan included a link to his video showing PB200 output looking much steadier than his standard windvane in a situation with lots of mast movement, and Irene’s reply started thusly:
“The mechanical vane appears to be reacting to flutter. The Ultrasonic wind sensor’s wind channel is very clean and while it may actually be exposed to similar flutter and wind turbulence, will not show it. This is primarily due to the filtering being performed to process the wind readings.”
and then went into the “The PB200 takes wind readings 8 times per second, etc. etc….” that Dan quoted.
But now that you know that the PB200 doesn’t use its
accelerometers the way many had thought, how can it suddenly be less valuable? Isn’t the opinion here virtually unanimous that the PB200 delivers unusually steady wind angle readings, even with mast motion?
Airmar’s “filtering” does seems a bit mysterious, but that’s what got me thinking harder about how different an ultrasonic sensor is. Just because your Windex does circles up there does not mean that a solid state sensor would see the wind go around in circles.
Finally, though, let’s note that ultrasonic wind measurement is not yet accepted as superior in the high end racing world. The America’s Cup use was an exception, and may have been dictated by the daily mast removal.
“filter” when used in a context like this probably means “not your father’s filter”, for example, something like a Kalman filter. Google that for as technical explanation as you would want.
Henning, I would add to what Ben wrote, that I have direct experience with the situation you described (copied below). Now the crew can use the autopilot safely.
To elaborate … on a cup & vane sensor, combined with an asymmetric sail downwind, using the sail by wind feature of the autopilot on my boat was unworkable most of the time. In light or gusty winds the asymmetric would jerk the mast, the vane would swing, and the autopilot would follow the errant reading turning my boat, risking an accidental jibe or best case causing the sail to collapse if my hands were not on the trim or the wheel.
The combination of the PB200 and my Raymarine S1G autopilot changed that. My 39 foot sailboat performs very well in conditions where the mechanical vane did not. No matter how much the mast is jerked around, the PB200 guided autopilot performs well.
Trimming the sails are now more fun with the autopilot than with a crew member at the wheel. I can find a comfortable spot forward, and fly the kite for hours on end single-handed, and even go forward to look ahead or adjust the foot of the sail with confidence the autopilot will hold steady.
—————–
From Henning in regards to a cup & vane wind sensor “The crew cannot safely turn on the autopilot to go trim the sails because the boat may broach or gybe before they have a chance to get back to the wheel. This is the kind of real world-problem that at least some people are interested in and this has nothing to do with accuracy and nothing to do with any kind of direction but has everything to do with “stable”.
I second Dan’s reports. He has better data than I have.
But ‘in my clinical experience’ his reports are spot on. I have used both the PB200 and the Maretron WSO100. The ultrasonic wind instruments’ apparent wind output is just better at the end of the day.
The autopilot absolutely works better with the ultrasounds than the vanes – but I have not A B tested between the ultrasounds. My ultrasound installations did not happen in a day. My whole motivation for the ultrasound was to test the improvement in short handed autopilot control and safety. It is real.
The information now is that the PB200 has minimal wind direction error with tilt up to 45 degrees. The Maretron claims the same immunity to tilt errors of 30 degrees. That may not be a big difference or even any difference at all. I do not know the specifics of the Airmar filter algorithms – but I understand it is not just based on the Kalman mathematics.
But that is irrelevant – the ultrasounds work better.
As to the future – clearly the racing systems have developed cpu based algorithms using heel pitch and yaw data obtained from near center of gravity sensors – to correct vane apparent wind errors, and combine this with in hull compass and speed data to produce True wind.
Unfortunately the inexpensive (compared to the B&G and NKE cpu solutions) Airmar solution has not separated their hardware into the two boxes – one at masthead where wind data should be read – and one in near the center of gravity where the heel ,pitch, yaw and compass data should be read.
Some how we need to convince them directly – or indirectly through Raymarine, Garmin, etc. – that there would be a big sailboat market for the separated devices. They have done this before (that is how their compass got packaged as a stand alone and as a package with GPS). Such a device pair would likely simulate the performance of systems ten times its cost.
Nonetheless, harbors have few to no ultrasound masthead units visible to my eye. Perhaps its people fearful of mast head electronics – but the vanes now have that as well.
I cannot understand the inertia – except that we have to look at our fellow sailors and ask how often they would benefit – most dream of long passages – but how many do them? And those that do are often racing with an autopilot.
I don’t know what push Airmar needs – but certainly seeing an interest in two or three units is not going to motivate them. They need an order of hundreds if not thousands to push them.
Sailors are dreamers – yes?
P.S.: The whole point of the ultrasonic winds stable and accurate apparent wind data is that it permits having the pilot sail to wind direction not compass heading while crew is away from the wheel. Sails don’t flog unless the pilot fails to follow the wind. ( nonetheless the heading may shift – and that may require urgent adjustment of both heading and sail trim, or acute puff/wind direction shift may overwhelm the pilot) so I would not dream of being out of reach of the wheel without a remote pilot control at hand for emergencies.
This has been a great discussion.
My understanding is that the America’s Cup boats used the ultrasonic sensors for calibration only, and that the sensors used in the actual racing were more traditional types (albeit at the extreme high end in terms of their data processing capabilities). I don’t think the big cats had to worry as much about pitch and yaw, or light air, so that may have influenced their decision I suppose, but I also expect that they have a very high sampling rate and data transmission rate in their systems.
Ben, you are of course right in that a device’s value should be based on it’s performance, not on how exactly it achieves the performance. And I can’t complain about it’s performance. Not in the least. It’s just that I hadn’t thought this performance possible with just statistics and massaging of wind data.
With my PB200, my H2183 and with a new Simrad AC12 computer, my autopilot performance is now a far cry from what it was a few years ago with the old Robertson computer and Simrad compass. On occasion in a good sea it would go crazy and alternatingly turn the wheel hard over to port, then hard over to starboard and back again.
With the AC12 I had recently played a bit with manual changes to the response parameters and we then did the passage from Lanzarote to Gran Canaria in beam winds of up to 30 knots with a wind sea to match on top of a old swell from behind. During the night, a handful of times we ended up on top of a breaking sea. The boat was rolled to about 45 degrees and the sidedeck disappeared in hissing sea. I was huddled under the sprayhood facing backwards and got my hand and arm wet that I had over the cockpit coaming. I was afraid the cockpit might fill but everything stayed dry. One eye of our daughter asleep in the recessed companionway opened for a second, then closed again.
Through all this, the autopilot efficiently turned the wheel about a quarter turn for a few seconds, then back to center.
I am really grateful for this performance and my thanks go out to Airmar for the excellent H2183 compass.
However, after learning that stable wind data is possible without accelerometers, I have a renewed interest in the LCJ Capteurs products as these have a far simpler and lighter masthead unit and, with NMEA0183, a more robust data link up the mast (the PB200 can also be used with only NMEA0183 communication) and I agree with Grandsoleil that the ideal Airmar sailboat product would have a masthead unit and a belowdecks box.
On the other hand, I can’t really complain about lack of robustness of my PB200 as one time during winter storage I dropped the unit about 2 feet on the floorboards and it survived unharmed. The floorboard is dented, though, as the weight of the unit is almost that of a same size blob of lead.
And I am pretty confident about the proprietary rubber connector that is inserted into the unit from the underside so water would have to go upwards to reach the metal connections.
I wish we knew more about what sensors and instruments were on the AC72’s but I’m pretty sure that a traditional wind vane would have showed up in photographs.
Come to think of it, I got to see both the AC World Series and the one day of the finals, and only noticed ultrasonic wind sensors on the support vessels. Here’s a shot I took of NZ’s #2 wing head and there only seem to be broadband antennas:
https://twitter.com/Panbo_BE/status/378223068042121217/photo/1
This is interesting, an article where the author estimates the very narrow range of apparent wind angles an AC72 experiences while racing is between 16 and 19 degrees apparent.
http://www.nauticed.org/sailing-blog/americas-cup-apparent-wind/
One can imagine that the apparent wind change is just 0.15 degrees for a 5 degree difference in true wind. Can that even be measured?
IMHO, the wind sensor might forgo measuring wind angle, might be located on a forward spar, and just like an airplane, only measure wind speed not angle.
I have a surprise for anyone interested in where the wind sensor is located on an AC72 (Ben posted above that it is not on the masthead).
Look for it in this picture.
http://www.kingmanphotography.com/#!/index/G0000QIEVFKrG9Uc/21
Both NZ and Oracle,look to have wind sensors forward on the sprit.
… and I’m curious why they are not ultrasonics?
The NKE (french company) wind sensor has been chosen by the AC teams for their proven high sensitivity and accuracy (when they are new). The experience cumulated by NKE on all kinds of racing boats for years are making them high specialists in wind data aquisition and processing. The limits of mechanical wind sensors is… that they are mechanical! They suffer from wear and calibration is assumed perfect only when they are new. An ultrasonic wind sensor is giving better results on the wind speed side of the measures… and does not wear. Accuracy and sensitivity remain stable for years. I believe that this aspect is not to be taken in consideration for an AC boat which is a “dayboat” 🙂 The competition between the two concepts is currently on the table on the French market…
The ultrasonic wind sensors are nowadays the obvious solution for blue waters sailing.
@Vents. Do you mean NKE or LCJ?
And I do not see any ultrasonics in the AC pics Dan provided.
Not disputing your tech claims, just wondering why the ultimate high tech bouy racing machines are using buggy whip wind sensor tecnology.
1- awhile ago I was tempted to question where one should measure wind. Too bad. I am
Late. The fact of the matter is that wind is different at deck and masthead. Sails are trimmed with varying twist and in fact is Most critical and for me an art I cannot reduce to precise numbers.
2- the precision of ultrasonic is valuable in autopilot control. Not so sure what it
Gains in the hands of a sail Trimmer or pilot schooled on the art and simultaneously readimg many other performance parameters.
Americas Cup teams do a lot of work on this. All of the AC72s used cup/vane sensors on the race boats and the teams only used sonics for weather boats.
http://www.kingmanphotography.com/#!/index/G0000QIEVFKrG9Uc/21
http://oi45.tinypic.com/urc47.jpg
http://oi45.tinypic.com/23vnc00.jpg
https://etnzblog.com/wp-content/uploads/CC121203-322.jpg
http://www.newportbeachindy.com/wp-content/uploads/2013/07/luna-race-med1.jpg
No serious race boats use sonics as the main wind input. I think you guys are mistaking a “nice *smooth* display and data output” as a “nice *accurate* display and data output” just like family saloons have damped rev counters to make them smoother and friendly to look at vs race car rev counters bouncing around all over the place on gear shifts. One is easy on the eye, one is accurate.
Sonics have some very good theoretical advantages and I think we will see them improve to the extent that they are better than or as good as the best mechanical sensors in maybe 5-10 years. They might be as good as a poor mechanical sensor now but they are nothing like a good mechanical sensor.
PDQ
—-
@ Sparky : I am the LCJ CEO, as you can see on my profile. As you can read in my post : “The NKE wind sensor has been chosen by the AC teams for their proven high sensitivity and accuracy”. These sensors are of great quality. The point I was making is that their limits is that they are mechanical and suffer from wear. Which is not an issue on boat racing around the cans. But ultrasonic sensors are much more reliable for ocean going. Also, they are more precise for wind speed measure. Again, this is a question of having the sensor which matches your navigation program.
—-
Regarding the choice of a ultrasonic sensor on those boat, we are aware that they have tested some. According to the picture,
http://www.americascup.com/en/news/8/teams/12885/whats-that
it looks like they have tried a 3D ultrasonic sensor designed for terrestrial applications. We are not surprised it gave bad results on a boat. It is a shame they have not contacted us, we would have supplied a good solution… We are not a big organisation and we have been lacking of marketing ressource.
—-
Regarding the location of the sensor on the bow sprit, bear in mind that those boats feature rotating masts! There are rotating mast sensors and wind data processors that can handle that but I suppose these guys try to avoid more stuff on the mast.
The position would not surprise cat sailors.
http://www.kingmanphotography.com/#!/index/G0000QIEVFKrG9Uc/23
As Dan comments above, the AC72 boats are going so fast that the range of apparent wind is very limited. So what good is it to them? For all I know, it is just data collection for later shore use. Who looks at the readouts? helmsman, trimmers, tactician? I found photos which shows a set of digital displays; there are no clues about what they show.
http://www.kingmanphotography.com/#!/index/G0000MmV.RonuXmk/64
http://www.kingmanphotography.com/#!/index/G0000MmV.RonuXmk/55
Vents, for sensitivity and accuracy would you say that the old tech is “buggy whip”? Or will the two technologies exist side by side for many years?
Henning,
I appreciate all your posts and I couldn’t agree with you more! All I want from my PB200 is the wind, the whole wind and nothing but the wind! I have installed a PB200 at the top of a 23.5m mast (27m above water level) aboard a 77foot catamaran. I initially thought I could rely on the compass heading from the PB200 so didn’t install another heading sensor. However, since using it we are seeing crazy fluctuations in the heading when the boat is in anything other than a flat harbour! Did you also see similar results? Now I want to install a heading sensor at deck level and switch off the heading in the PB200 so I don’t get clashing data.
I see you mentioned that you managed to switch off certain parameters using weather caster.. Could you explain to me exactly how you did this? I have managed to load weather caster and I can interface with my NMEA2k instruments via the USB gateway. What do I do next?
I’ve followed this discussion with great interest and some confusion. I have a PB200 on top of our 105′ (32 m) mast and I use the heading sensor output without the issues mentioned.
Recently I realized that its all about how the PB 200 heading data is used. My primary use of the heading data is for the autopilot. The autopilot massages the heading data by integrating over time (averaging). The end result is that when I steer the boat to a heading with the autopilot the results are rock steady. I am very pleased even when charging downwind in 30 knots and high seas.
However, when I use the PB200 heading data for AIS overlays on the Furuno 1835 radar display (via an Actisense N2k to 0183 converter) , things aren’t so nice. The AIS overlay is quite a bit less than “stable”.
Having said that I also have a Airmar GH2183 GPS & Heading sensor mounted at deck level as a backup. While the AIS display is more stable with the deck mounted heading sensor, its still abit jumpy as is the raw heading data coming from the GH2183 when we are on passage.
The one thought I’ve had recently is that perhaps the output frequency of the heading PB200 and GH2183 is too low for my radar display ie there is a mismatch between the display integration period and the heading output frequency. When I’m hiding from the next frontal passage here in the Bahamas perhaps I will see whether I can increase the output frequency.
Anyone have similar experiences or thoughts?
Cheers
Don
Jonny: Three things first:
1. “Clashing data” may not be a problem for you with your specific setup. Many or most instruments and chart plotters based on NMEA2000 have functions to select the sensor to use from several sensors of a specific type. I had a clash using Coastal Explorer, which, at the time, did not have such a function (now it has and a very good one).
2. Weather Caster is a shining example of a rotten user interface. If all their products were like this, they certainly wouldn’t have the market share and following that they have. It is not just the style of the user interface but the whole thing is full of functions hidden away and unexpected results of changes that you make. You really have to learn through experiment and always expect that what the software will do is what you least expect.
3. You can’t disable the compass but stop it from sending heading data on the bus by setting the frequency to zero.
Here’s how:
a. Advanced Setup
b. select “Source Sensor: Weather”
c. Wait for the selection to change and the program to become responsive again. Don’t lose patience.
d. click button “Enable/Disable Functionality”
e. Wait for the window to open. Don’t lose patience.
f. click tab “Compass/Altitude”
g. in column “Interval” set everything to zero
h. click Save and close/exit out of the program