
Simrad StructureScan, learning the tool

Rats! I thought I’d recount some of the summer’s Simrad StructureScan experience since I mentioned it in Monday’s entry about chart problems, and while I was pleased to find a screenshot taken right in the Thorofare discussed…I failed to snap one after passing over the disputed danger. But you can see how flat and smooth the bottom is just short of what is supposed to an “awash (at low tide) rock”; please trust that the bottom stayed just like that as I drove right over the annoyance, as I posted on AC. But maybe you can’t intrepret the screen above well until you see more of what this side looking technology can do…
 Now here’s some rocky bottom! And the distinct structure is useful for a discussion of how StructureScan display windows work (you might want to click on the image for a bigger version). First note the upper right window, which is like a conventional fishfinder, showing a right-to-left profile of the bottom that’s passing directly below the transducer. Only it’s more detailed because of SS’s very narrow beam width and the extra high 800kHz ping frequency. Now check the main screen, which is also a history of very narrow pings, only this time running from top down in time and vessel track and presented as a butterflied composite of fanned ping returns. The light water column seen on each side of Gizmo’s track is perfectly symmetrical because they image the water directly below the boat. For same reason, as notated, a rock passing below the boat is shown in three places.
Now here’s some rocky bottom! And the distinct structure is useful for a discussion of how StructureScan display windows work (you might want to click on the image for a bigger version). First note the upper right window, which is like a conventional fishfinder, showing a right-to-left profile of the bottom that’s passing directly below the transducer. Only it’s more detailed because of SS’s very narrow beam width and the extra high 800kHz ping frequency. Now check the main screen, which is also a history of very narrow pings, only this time running from top down in time and vessel track and presented as a butterflied composite of fanned ping returns. The light water column seen on each side of Gizmo’s track is perfectly symmetrical because they image the water directly below the boat. For same reason, as notated, a rock passing below the boat is shown in three places.
But beyond that bottom profile, the symmetry ends; which can take a while to grasp. In this scene, I motored over the end of a large ledge that gets wider and shallower to starboard but disappears into the mud to port, before another ledge starts up. Note that the 100 foot range shown to each side does not mean I’m looking out at 100′ of bottom but rather at a fan of returns as much as 100′ from the transducer. The bottom imaged is about 50′ on each side, for a total swath of about 100′. Are you with me?
One problem with this screen shot is that I didn’t have track display turned on and something was screwy with the heading sensor. Hence the usually useful chart window is less so. Gizmo is actually headed at the COG of 320 degrees, trying to stay in deep water as we entered the “brickyard” known as Seal Harbor on the Northwest corner of Vinalhaven. Please keep that in mind as we go to the next screen…

Now that’s an interesting little bottom bump, but the main purpose of this shot is to illustrate how the NSE’s cursor controls let you search through a fair bit of StructureScan history. Those red bars on the side and down looking windows indicate how much history you’re seeing and where it is along your track memory. Note how the cursor shows on all three windows and that two have pop-ups showing it’s fixed and relative positions and in the side scan case depth and temp too. Note in the down scan window that I managed to run directly over a lobster pot, which was well imaged along with its warp. But I had to notate where the same pot shows up in the side scan image, possibly because I had the color gain turned down lower. Yes, you can colorize this imagery, though I don’t. Incidentally, because of the track and heading issues explained above, it’s hard to tell where the bump is; it may be off the chart or it may be uncharted. But you’re probably wondering how deep this gadget can see…
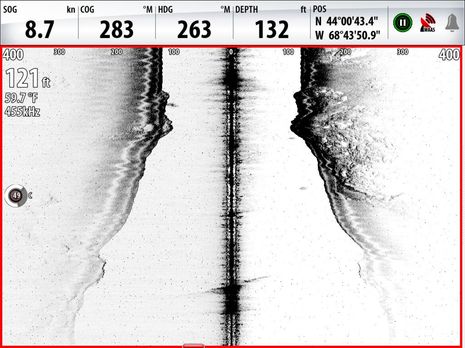 Well, this is the maximum 400′ boat-to-side range and this is about as deep as I’ve seen much structure. I might have captured more detail further out to the sides with more gain, hard to say. Note that I did switch down to 455kHz, which is better for depth. I switch the other way at about 40-30 feet, as 800kHz is better at detail…
Well, this is the maximum 400′ boat-to-side range and this is about as deep as I’ve seen much structure. I might have captured more detail further out to the sides with more gain, hard to say. Note that I did switch down to 455kHz, which is better for depth. I switch the other way at about 40-30 feet, as 800kHz is better at detail…
 This bottom is pretty dull, but that’s what you’re hoping for in an anchorage or mooring field. And if you click to make it full size you’ll see a mega mooring, two 3 ton granite blocks bridled together to secure the 100′ Swan Red Sky when she’s in Camden. You can also see some of the top chain running from the bottom up to the mooring ball, as well as a bit of the mooring line. I was quite close to that mooring ball, which is why some of the chain appears in the water column. Another screen I have clearly shows the untwisted bridle attached to the top of each block. I don’t know who installed this mooring but they sure did a nice job of landing those big blocks neatly, though I doubt that anyone but us has actually seen their work as well as this. I’ll close with a screen which shows that even 455kHz can image shallower bottom well…
This bottom is pretty dull, but that’s what you’re hoping for in an anchorage or mooring field. And if you click to make it full size you’ll see a mega mooring, two 3 ton granite blocks bridled together to secure the 100′ Swan Red Sky when she’s in Camden. You can also see some of the top chain running from the bottom up to the mooring ball, as well as a bit of the mooring line. I was quite close to that mooring ball, which is why some of the chain appears in the water column. Another screen I have clearly shows the untwisted bridle attached to the top of each block. I don’t know who installed this mooring but they sure did a nice job of landing those big blocks neatly, though I doubt that anyone but us has actually seen their work as well as this. I’ll close with a screen which shows that even 455kHz can image shallower bottom well…
 If you’ve cruised Downeast Maine you may recognize that bit of chart, or at least appreciate the image. Gizmo is just passing over the Petit Manan bar, a rather nasty spot where big currents often meet a substantial swell (classic cruising guide description here). I’ve crossed it a number of times, almost always with trepidation, but it was flat calm this particular day (boat motion does effect side viewing sharpness, though not as easily as many think). At any rate, I was somehow pleased to see what I interpret as smooth stone with brain-like furrows and lots of tenacious seaweed on top. I still wouldn’t want to touch that bottom in a seaway, but when I returned in worse weather, I was comforted to know that there weren’t oddball boulders lurking deep in the buoyed channel.
If you’ve cruised Downeast Maine you may recognize that bit of chart, or at least appreciate the image. Gizmo is just passing over the Petit Manan bar, a rather nasty spot where big currents often meet a substantial swell (classic cruising guide description here). I’ve crossed it a number of times, almost always with trepidation, but it was flat calm this particular day (boat motion does effect side viewing sharpness, though not as easily as many think). At any rate, I was somehow pleased to see what I interpret as smooth stone with brain-like furrows and lots of tenacious seaweed on top. I still wouldn’t want to touch that bottom in a seaway, but when I returned in worse weather, I was comforted to know that there weren’t oddball boulders lurking deep in the buoyed channel.
And that’s how it went this season. StructureScan is one of my favorite bits of gear simply because it feels like new eyes on an aspect of my beloved coast I know very little about. It’s also helping me to quickly learn anchorages and dicey passages as very few cruisers ever do. And if I fished or lobstered, I have to believe this would be a big help. And, mind you, I just jury rigged a transom-mount SS transducer to Gizmo’s keel. I suspect that the dual thru-hull transducers that Simrad is introducing would work better, as may the dual Side Imaging transducers the new Geonav gear will support. Let’s not forget that Geonav’s sibling Humminbird pioneered this cool technology, as I saw in my harbor last summer.
Thanks Ben, I have structure scan on a Lowrance and looking at the undersea world sideways and split down the middle like a filleted salmon takes some getting used to but its a fabulous feature for those of us that need detailed bottom info.
Ben, can you please explain more about the relationship between the sidescan and downscan systems? Lowrance’s marketing materials and documentation are very hard to interpret on this point.
What exactly is DownScan? And what role does the standard (non-StructureScan) transducer play in rendering the imagery?
I’m considering an HDS-5 + LSS-1 for the dinghy but want to understand the transducer configurations before I pull the trigger.
Thanks!
/afb
Adam, the downscan imagery is generated with the same LSS transducer as the side viewing window. In fact, I don’t have a Broadband Sounder box or transducer attached to Gizmo’s Simrad NSE system.
If I did, I might be seeing more fish, though that’s a bit hard to presume as Maine fish stocks are not great. It’s common to run an LSS downscan window alongside a sonar window because the first details structure while the latter is better at spotting more ephemeral targets.
In fact, I just recently learned that you can overlay downscan on sonar, or maybe it’s vice versa. You can see what it looks like in image #3 of this slide show:
http://www.lowrance.com/en/Products/Marine/Broadband-Sounder-and-Ethernetworking/StructureScan-Sonar-Imaging/Display-Viewpoints/
Thanks, Ben. That clears it up.
/afb
As someone just about to instal a full Simrad NSE system with broadband and structurescan this is wonderful stuff.
Thanks Ben for all the great information you provide.
cheers Peter
Here’s a neat video about StructureScan from Team Old School:
http://www.youtube.com/user/stripers182#p/u/0/62allBQil9s
Hi all,
On a slightly tangential topic, are there any true forward looking contour trackers or sonars available for pleasure yachts?
Although the StructureScan technology is interesting, it doesn’t seem to be particularly useful for entering new harbours, or poorly charted ones, etc.
None of the main guys (Simrad, Furuno, Raymarine, etc) appear to offer a true forward looking depth contour instrument.
Any input?
Paul.
If yuo add Garmin to your list of the main guys then you can expect to see forward array sonar from Garmin using Interphase technology. Search “Garmin Triple wow” on Panbo and you will see Ben’s entry