
Mast rotation, a multi-manufacturer solution?

Panbo reader Laurence Woodward built his own 40′ catamaran in Devon, England, and he’d like to use Garmin GMI 10 color N2K instrument displays at both helms. However, his mast rotates and therefore he needs some sort of sensor to keep track of that rotation, which must then be applied to the apparent wind data coming from his masthead vane (or ultrasonic). I doubt that Garmin will develop its own rotation sensor because there aren’t that many rotating masts out there, but then again maybe just a software tweak to their existing rudder angle adaptor might be all it takes. Or perhaps there’s another way? Let’s discuss…
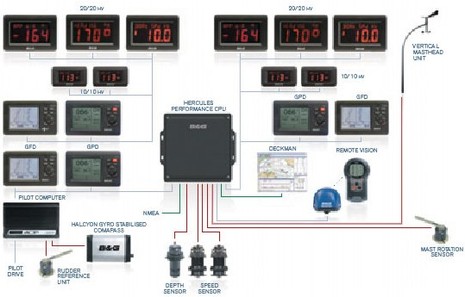
There seem to be two ways to measure mast rotation. One is to mount an electronic compass on the mast and compare its output to the vessel’s regular fixed compass. That’s what the elegant TackTick T221 seen at the top does when integrated with the company’s wind and compass sensors (and note that it’s all done wirelessly). Nexus seems to use the same technique with its MRC Box (though it’s wired). But B&G appears to be using what looks much more like a rudder angle indicator, as seen in the suggested multihull setup seen below. It strikes me that it might be a little tricky to securely mount a mechanical sensor like that at the base of a rotating mast, but if it can be done on B&G-style grand prix ocean racers, I guess it can be done on a cruising cat. Besides, NKE claims that its mechanical rotation sensor — could it really cost over $1,600? — has withstood the rigors of Open 60s and Mini Transats.
However, I think all these systems are pretty much closed networks and can’t realistically help Laurence get wind screens on his GMI 10s. Oh, they probably can output AWA (apparent wind angle) via NMEA 0183 — which the GMI 10 would understand — but I’m pretty sure he’d need a single manuacturer’s rotation sensor, wind sensor, cpu, and maybe its compass, just to calculate that corrected AWA. Plus he’d need at least one of the same manufacturer’s displays to do the setup and calibration. This is not just a matter of proprietary mind sets; I don’t believe there’s any provision for a mast rotation correction in NMEA 0183, or even in NMEA 2000. While most every wind sensor system let’s you put in an offset if you fail to mount the sensor exactly aligned to the bow, that’s a typically proprietary calibration value and not a standard dynamic data field.
All that said, how hard would it be get a smart display like the GMI 10 to understand that sometimes it will be told that a certain rudder angle value is actually mast angle which needs to be added or subtracted from raw AWA to get real AWA? And couldn’t N2K “instances” be used so that the real AWA — and a real rudder angle, if present — are what get’s seen by other devices on the network? And shouldn’t a system with an Airmar WeatherStation wind/heading sensor on the masthead and another compass below be able to cope with mast rotation? Couldn’t Maretron offer a choice of compass or angular rotation corrections. And, finally, couldn’t the NMEA write a new angular value PGN that — like the fluid level PGN with its various fluid types — included a list like rudder, mast, trim tab, etc.??
Admittedly I’m just riffing here, and it’s quite possible none of those things will happen. But isn’t it interesting how important one little data point can be? A significant portion of the electronics on Laurence Woodward’s catamaran may be predicated on a simple angle measurement. And while I’m asking questions, how come none of the dedicated sailing instrument companies that do offer mast rotation correction have adopted NMEA 2000 or all-in-one color displays like the GMI 10?








You could have a black box that has two can i/fs, i/f #1 takes in the PGN for the angle and the wind, computes the corrected AWA and “regenerates” the correct PGN and sends it out on can bus i.f #2, hence the GM10 doesnt know anything better.
Dave
Rotating masts aren’t getting any less common, so I’m guessing it’s only a matter of time before the instrument manufacturers recognize the need to offer a clear, simple way around this problem. Part of the beauty of N2K is that there aren’t really any technical hurdles blocking the addition of such extra functionality, only political / standards development hurdles. If the manufacturers can reach agreement, a new PGN can be spec’d and easily included in regular software updates.
Mast rotation or deflection sensors are indexers or load cells, not the kind of things the average boat really has on it, hence the likely omission from regular consumer grade electronics, and NMEA standards.
I can see some form of angle measurement equipment to provide offsets to the wind angle PGN. All something that would have been built into an Ockam or B&G unit from the get go. With no disrespect to Garmin, I doubt it was a consideration, since only real geeks (i.e. the America’s cup crowd) would normally care, and they’d have the bags of cash and techies to create custom software & hardware to deal with it.
This makes my one request of the year, simple! All I want is a wireless N2K wind sensor for on top of my 38 lb – 30 ft dinghy mast.
For what its worth, the B&G and (I believe) NKE sensors are pots. Using a string pot is also an option. Nice thing about a string pot is it doesn’t need to be co-located with the part it is measuring as long as a piece of line can be strung between the part and pot.
Using a compass is good in theory, but how accurate will it be in practice? Will the acceleration and heel errors be similar between the ships compass and the mast compass? The answer is probably yes for 85% of users. At the grand prix level a degree or two of variable error would be infuriating.
I like Daves idea, although more boxes means more points of failure, but at least it could get the job done.
Could this also be used mounted somewhere on the boat to determine which direction the boat was facing? This would be interesting while at anchor, drifting, or stopped. Too pricey for that now.
Any electronic compass will do that for you, Peter, and if it outputs NMEA 2000 it will easily send boat heading to all devices on the network. The problem I tried to write about here — perhaps not well — is how to deal with a wind sensor that’s mounted on top of a mast that rotates. Normally they’re carefully mounted on the boat’s lubber line so they simply measure the angle of the apparent wind from the bow, but obviously that has to be corrected if the masthead sometimes points at the bow, sometimes 30 degrees to port, etc.
On most boats the complicated calculations have to do with True Wind, which unfortunately has several definitions, discussed here:
https://panbo.com/archives/2009/10/airmar_cs4500_part_ii_reliable_true_wind.html
But you can’t even think about measuring true or ground wind if there’s an uncorrected variable in the apparent wind measurement. And, come to think of it, there a few sailboats with even bigger issues than the mulithulls and turbo charged monohulls that use rotating masts.
They would be the proas that actually “shunt” instead of tack. I got to sail with Russell Brown many years ago and he called the ends of his proa the “now bow” and the “then bow”! I think he used telltales to determine apparent wind 😉
http://en.wikipedia.org/wiki/Proa
Sounds like a job for an industrious amateur programmer and a PIC. Take in 2 signals, do the math and spit out one stream of data in NMEA 0183 (or NMEA 2000) format.
Right, KM. Or maybe Garmin or Maretron could simply reprogram their rudder angle adaptor so it output a corrected N2K Wind PGN (130306). And it shouldn’t really necessitate a split network, as Dave suggested in the first comment. When most displays (with some major exceptions, like Raymarine gear) see the same PGN coming from multiple sources, they give you the choice of which one you want to use. So instead of choosing wind info from the wind sensor, a GMI 10 user could just choose it from the adaptor or the pic box or whatever. However, I’m just theorizing here and the idea may well be an abuse of the N2K standard, as there is no PGN for mast angle.
Off the top of my head, four potential solutions come to mind.
Solution #1 (NMEA 0183 only): Use a Brookhouse NMEA multiplexer (and possibly others) configured to compare the value of two solid state compasses (for example masthead PB200 and ship mounted H2183) and send the value to an Airmar PB200 under cover as an azimuth offset.
In doing so the Brookhouse would need to emulate the command that the Airmar WeatherStation PC software sends the PB200 via NMEA-0183 (azimuth offset ??) when you choose the WeatherStation configuration option to correct for any off-center alignment error when installing the PB200 on the mast. This value it accepts runs all the way up to +/- 180 degrees (I would know, one season it was actually installed backwards)
The Brookhouse would need to be directly connected between the input/output of the box that supports the PB200 being attached to a PC via USB, to also prevent the PB200 compass heading from being transmitted onto the boats 0183 network and becoming confused with the ship mounted heading. Using WeatherStation you would also need to command the PB200 to disable the output for True and Ground wind, and the GPS.
This is kind of a wild idea, it may not be possible for the Brookhouse to construct such a sentence, the sentence might contain other settings that together make it unwieldy to do this and/or the PB200 may not be able to accept the value be altered as frequently as may be needed. (once every other second ?)
A future PB200 may do this better than the current PB200, which has limits to how much sea state / mast motion it can accept, before the compass heading is distorted. It was reported here on Panbo that Airmar is looking to put the entire guts of the H2183 into the PB200 that would enable that.
An alternative to a future PB200 right now, may simply be to mount an H2183 onto the masthead, disable the PB200 compass heading, and use the NMEA-0183 output from two H2183’s.
A Maretron WSO100 (weather station) equivalent to this wild idea may also exist? Note the WSO100 doesn’t have a solid state compass built it. Such mast mounted compass heading source would need a dedicated 0183 cable run back down to the Brookhouse as NMEA-0183 doesn’t support having two compass heading sources.
Solution #2 : I have not kept up with the thread, but I have the feeling some Panbot’s (Kees ?) will have an easy way of inserting custom code into a multi-purpose PC application / boat server (intended for wi-fi or Bluetooth connectivity to iThings/Android/laptops) that could compare heading sensors and calculate AWA, TWA, etc. and label it as a second wind sensor. Couple that with an Instrument Display that allows you to chose with wind source to display from multiple N2K sensors of the same type and you would be all set. But, do you need a computer science degree?
Solution #3 (0183 and NMEA 2000): Airmar enhances the PB200, maybe call it a SB200 (Sail Boat 200 ??)
1. The PB200 compares its internal solid state compass to another solid state compass fixed on the boat, to determine mast rotation, like an Airmar H2183.
2. The PB200 applies the difference to the measured apparent wind angle measured by the PB200, reporting a new AWA using the identical outstanding mast motion correction capability I have come to love.
3. When operating in this mode, it suppresses the sending of heading information from the PB200
4. When operating in this mode, it also corrects the true wind (TWS & TWA) and ground wind (GWS & GWA) information.
Solution #4 (0183 and NMEA 2000): In addition to Solution #3 Airmar (Maretron and others?) add support for mechanical mast rotation sensors, including repurposed rudder sensors.
As an aside, I would think if anyone out there who is considering building a dedicated mast rotation sensor for N2K, rather than using a proprietary PGN, would use a rudder sensor PGN.
I have the same problem.Considering multihulls with rotating masts are a small part of the recreational boating market,I’m not holding my breath for a commercial solution.
I would like to experiment with a PB200 mounted on a 6 ft pole on one of the bows or the fwd x-beam of my catamaran.I don’t know what the difference will be compared to a masthead sensor.
On second thought, on solution #2 above, in many instances only AWA would need to be calculated (AWA = AWA measured + rotation sensor offset) and stuffed with AWS in a N2K PGN. Most boat instruments will do the rest of the math (True wind & ground wind)
I can’t see how using a fluxgate compass could be used to measure mast rotation. Far too much varying data to be useful.
The reason I suggested the two I/f can solution is that nmea2k source selection is somewhat of a crock.
Dave
“…nmea2k source selection is somewhat of a crock”
Say what? I’ve used source selection on many devices in many situations without a problem. What’s your issue, Dave?
No I don’t mean the concept , more than many companies haven’t implemented source selection well in their system software. The worst being raymarine.
Dave
Which companies besides Raymarine, Dave? I think that Simrad, Lowrance, Garmin, Maretron, and Furuno all let you see what sources are in use and choose if there are duplicates. That’s on both MFDs and instrument displays with the exception of Furuno FI-50 instruments. It’s true that none of the PC charting programs that now support N2K have this feature yet, but I trust they will eventually.
Adding a computation function like this to my suite of software would not be hard. In fact it would be a piece of cake on a Linux system, I’ve been doing filtering in just a simple UNIX pipe. Adding this using the existing wire-together-using-pipes can be done by anyone with a little scripting knowledge.
If there is real interest in this I could cook up a standalone Windows or Linux program that would work with an Actisense NGT-1 and then perform some calculations and transmit the calculated values back onto the N2K bus, and also serve as a TCP server so PC & mobile apps could read all N2K data. Such a standalone program would be usable by anyone with the willingness to invest in a NGT-1 and keeping a (small) computer running.
Would that be of interest?
Mind you, there wouldn’t be a GUI included, the calculation functions would likely be done using some simplistic text based configuration file.
P.S. I think Dan’s idea of sending updates to the PB200 is a great example of out-of-the-box thinking, but if you are going to send out PGNs over the network you might as well send out enhanced wind PGNs directly. That would work with any wind wand (not just a PB200) and be compatible with any set of instruments, as long as they allow source selection. Updating the offset that regularly might also prematurely wear out the flash memory where the data is stored in the device.
If there are flaws (or flies) in my thinking, please be gentle, but suppose a PB200 calculated and reported true wind on a rotating mast. It has all the needed data, including the advantage of reading wind 50+ feet above the surface. Would that be useful?
Yes, it’s the apparent wind that fills the sails, and it might seem ludicrous to invest a lot of firmware in calculating apparent wind for a display when a wet finger would be nearly as informative, but you might need no more than the heading data from an autopilot to display a stable indication.
So shoot me.
Uh-oh, Sandy, dangerous waters ahead! I think you’re right about the PB200 but definitions of True Wind are in order. I’m pretty sure the PB200 wouldn’t need a fixed orientation to calculate true wind relative to ground, generally expressed as an angle from true north. But it surely would be confused about true wind relative to the water, which is usually expressed as an angle port or starboard of the bow. And that’s the true wind that really helps sailors maximize performance (even if it isn’t perfectly “true” as it ignores a boat’s set and drift). Are you with me? (Hopefully I haven’t further confused, or mispoke.)
This from Laurence:
“Thanks. I realise I was taking a punt and I really appreciate the entry you have done; hopefully one of them will take some interest. Originally I was going to have a wind sensor on each stern and a switch between them but it just makes everything a bit cluttered up. I have designed a mechanical device which tacks the instrument by pulling on a continuous line but the problem is checking it’s lined up correctly each time. ( tacks the tricolour at the same time ) Heath Robinson comes to mind.
I guess the trick is to use the tacktick wind and try and get the gmi 10’s to display the information. I am a bit unclear as how to achieve this economically. Maybe a wind T120 a T221 mast rotation sensor and T106 remote ( T113, T122 ) and a Simrad AT 10 0183/2000 interface box using the autopilot compass Raymarine spx5 wheelpilot or new Garmin sailpilot.
Suddenly the mechanical system does not look that complicated or expensive if a bit primitive.”
{If you too wondered who Heath Robinson is, check out some his hilarious illustrations found in this Google search: http://goo.gl/r8Vjh }
Laurence, what Kees is offering is going to meet your needs to do the computation so your existing instrument displays, without modification, show the correct value wind values. You just need to detect position of mast.
If the mast rotates to fixed positions (not variable) starboard and port (e.g. amount of rotation is a fixed amount), and your plan to purchase a PB200 already, you need not wait for a future PB200 as the precision of the mastmount compass does not matter, Kees could use a value you provide for rotation and just compare the two compasses to know if your mast is rotated port or starboard ignoring the amount of the difference between the mast and ship mounted compasses.
** new idea ** Another idea about detecting the position if the mast rotates to fixed positions starboard and port (e.g. amount of rotation is a fixed amount. Use two or three waterproof magnetic switches at the mast base (port, center, starboard) or (port and starboard) combined with a Maretron SIM-100 or RIM-100 that would report the mast position back to Kees via N2K. The SIM and RIM can monitor other boat systems as well (e.g. are your masthead lights good, count each time your bilge pump is running, to much vacumm on your fuel lines, etc. )
All. just to get terminology on the same page, on a race boat, there are three wind angles, “measured wind angle”, “apparent wind angle” and “true wind angle”. True wind angle is is an angle relative to the bow and depending on how fancy the instruments are, would incorporate leeway in the calculation.
Wind relative to a compass is called “magnetic wind direction”.
As you are scheming solutions to this problem, keep in mind that some of the ideas above use wind data at 1hz. This will be completely inadequate in practice. An update rate of 6hz or better is more like it.
Thanks, Eric. We have tried to untangle wind definitions before, using somewhat different terminology:
https://panbo.com/archives/2009/10/airmar_cs4500_part_ii_reliable_true_wind.html
I recently came across an Airmar document which describes the five different “Reference” flags currently defined for NMEA 2000 Wind PGN 130306:
00 = Theoretical Wind (ground referenced,
referenced to True North; calculated using
COG/SOG)
01 = Theoretical Wind (ground referenced,
referenced to Magnetic North; calculated
using COG/SOG)
02 = Apparent Wind (relative to the vessel
centerline)
03 = Theoretical (Calculated to Centerline
of the vessel, referenced to ground; calculated
using COG/SOG)
04 = Theoretical (Calculated to Centerline
of the vessel, referenced to water; calculated
using Heading/Speed through Water)
I’m afraid there is no flag for “measured wind angle” which I imagine is raw data from the masthead that can then be corrected for mast rotation, upwash, wave motion etc. to get precise Apparent Wind Angle. And Reference #4 — which I think is the most common understanding of a sailor’s “true wind angle” — is not corrected for leeway, while #3 is corrected for leeway but also for set and drift. Complicated!!
Speaking of proas… this same set of problems must come up all the time on commercial craft (most short-haul car ferries are double ended and “shunt” in the same manner as proas). Would it be logical to surmise that the commercial-grade electronics manufacturers (Furuno, etc.) have worked out a reasonably effective way to handle a 180-degree reversal of all compass, radar, wind, etc. data?
Interesting! Laurence Woodward was in touch again, wondering if he couldn’t just use a GMI 10 to change the offset of a GWS 10 wind sensor every time he tacks his catamaran. That’s definitely possible, and I guess the several key taps needed every time might seem reasonable given the complications of other solutions 😉
But a look at Garmin’s GWS Configuration Guide (downloadable here: http://goo.gl/zi2Gx ) reminded me that Garmin provides alternate command line configuration for many of its sensors. The sentence “angleoffset=xxx” {1-359 degrees} sent to the GWS 10 alters the AWA PGN output by the GWS until further notice.
I don’t know what the command line PGN looks like, and don’t have a GWS 10 on hand to analyze it, but it does appear like there’s a much cleaner way than we’ve realized for a third party device to modify the network AWA data to account for mast rotation.
Kees had pointed out a flaw in the wild idea of changing the offset in the PB200, which may apply to changing the offset in the GWS 10 as well.
Kees wrote “Updating the offset that regularly might also prematurely wear out the flash memory where the data is stored in the device.”
If the GWS 10 is only changed once on each tack, which amounts to maybe 5-20 times a day, at what point does flash memory become a limitation?
So does this mean I can go and get a GWS10 and run it manually until I can work out how to get a sensor to transmit the angle offset automatically to the GWS10 when the boat tacks.It would have to read the angle 1-365 degrees so I guess the rudder sensor would not work a it appears to measure 180 degrees port and starboard. I have to admit I would need some help as it’s beyond my capabilities
Well, that is the method that Dan suggested as well, but he was suggesting a PB200. It will work with most any windset, I guess. My reservations as to life of the flash memory still stand.
How about the following solution that assumes that Laurence only wants two distinct offsets: one on port, one on starboard.
– Get an analog Raymarine wind wand
– Get _TWO_ Raymarine Wind pods
– Connect the two pods to the same wind wand
– Hack together a mechanic switch that only enables power to ONE of the pods, based on the mast position. This could be done with a small magnet and a reed switch, for instance. The switch could be located on the inside and the magnet on the outside of the deck, making it fully waterproof.
Now the investment is down to a wind pod converter which is € 200 so probably about the same in £ or $, plus a few bob for the reed switch & magnet.
If it turns out that the wand doesn’t like being connected to one unpowered and one powered pod you’d need to put in a relay that switches two extra wires.
Laurence, I just fired up my GMI 10 and determined that changing the GWS 10 Wind Sensor offset takes at least twenty key taps, but I suppose you could get fairly quick at it.
(You could also simply mount the sensor on the theoretical centerline and interpolate the known AWA error on each tack. And note that the GMI let’s you adjust the up and downwind display scales, which might help visualize what’s actually going on better. Has the “KISS principal” crossed the Atlantic? http://en.wikipedia.org/wiki/KISS_principle 😉
The idea of a third party gadget reading the “rudder angle” of the mast and using Garmin’s offset command
line to make the correction is theoretical for sure, but I am going to do some experiments and ask some questions. It could be that Garmin’s calibration language, along with Airmar’s clearly documented calibration PGNs, could be used by third party developers to do some neat things.
Incidentally, I really enjoyed rediscovering Heath Robinson thanks to your reference above. I think all marine “contraptions” should checked against drawings like this:
http://kaegh.files.wordpress.com/2009/02/heathy.jpg
1) KISS — sure that travels across the Atlantic, the first “serious” app that I wrote when I was 14 years young was called KISS.
2) As to write cycles in the microcontroller that’s in the wind instrument, we can’t say for sure. If it is an AVR then data like this is likely to be stored in the on-chip EEPROM. According to AVR this has a 100,000 cycle life. (See http://en.wikipedia.org/wiki/Atmel_AVR .)
At 20 tacks a day, thats 5000 days worth of sailing. By that time you’re likely to need a new wand anyway 🙂 so maybe this argument isn’t that important.
…or be ready to deploy the hot air balloons and climb into the easy chair: http://goo.gl/0RyKa
I think I may have mucked up my last reply. I was wondering if I could leave a GMI 10 dedicated to feeding offset angle I think 20 taps would drive me mad if I am not already. The Heath Robinson version is a continious line driving a worm gear. The spur gear cannot drive the worm so it always locks in position by adjusting the line length, and you probably could get it to work automatically. I think the KISS version doesn’t bother at all and probably uses a damp finger.
Sorry for coming in at the tail end of this discussion, but we have already done a similar thing for a number of boats with rotating masts that have radar scanners on the mast.
We have developed a solution that uses the B&G rotation sensor (which is the same as their rudder angle sensor, by the way), and also sits in line with the NMEA data from the compass to the radar.
Obvioulsy if the mast rotates, “Head up” becomes “Mast up”, which isn’t what most people want. By adjusting the compass heading by the angle of mast rotation, we give the user the ability to display mast up, head up or north up radar images. The interface also has a calibration tool, to zero the mast rotation ad scale to allow for use of different voltage ranges.
With the processo board we use, we can easily extend this to take in a digital or analogue signal from the wind vane, and output a corrected value.
There’s no info on this on the web site, but let me know if anyone wants more information.
Well Tim I am intrested and could do with some more info. Sounds as though your processo board does what I need correcting the wind vane output before it goes onto the NMEA 2000 network. If I had radar as well could I use one B&G rotation sensor for both processo boards. I have to admit I have slowly begun to think that I will give up on the Garmin and go for Tacktick.
Downwind hat would not work, your spinnaker or main blanket it. I used a windsurfer mast mounted on the aft beam with the wind instrument mounted on top. It is not as accurate as on the masthead because the main directs the airflow to the sensor but is good enough (barely) for my use.
Rather than going to all this effort, consider a simpler mechanical solution. A rotating mast might have a swivel for the forestay. Replace the swivel axle with a rod that extends through the masthead, to a plate that mounts lights and sensors. The mast is free to rotate, but this swiveling forestay tang remains aligned with the vessel.
Hi Sandy good idea but the masthead halyard fouls it all up. Back to the drawing board. Could be tacking windsurfer mast on sterns.
Not a factor, Laurence.
Sorry for the delay; but I posted a couple drawings at http://www.boatdesign.net/forums/multihulls/mast-rotation-hardware-37024.html#post447870
for further comment on a simpler mechanical solution to the issue.
Yes, I do know this is a marine ELECTRONICS forum, but sometimes you can do things without disturbing a bunch of innocent electrons!
Hi Sandy, Thanks for the electron free drawing. Your idea will work, only problem it would cost me the price of a mast rotation sensor to modify my forestay attachment point. I think I am going to go with a tacktick system and will post my final solution and report on how it preforms.
Certainly; I didn’t realize you were modifying an existing rig.