
Seapilot Vector Compact GPS Compass & True Heading comes to the USA

When I mentioned strong contenders for the 2014 DAME electronics award, one I had in mind was the SeaPilot Vector Compact GPS Compass. Yes, in many ways it’s just another GPS compass, but it’s substantially smaller, substantially less expensive, and the design seems suited to good performance on many types of boats. Before getting into the details, though, let’s deal with possible brand confusion. While True Heading, parent of the recreational SeaPilot brand, has been selling Vector GPS Compasses in Europe for some time, the core technology comes from Hemisphere and similar compasses are sold by ComNav, Si-Tex and others. The Vector Compact is not only a new model but is also much more exclusive to True Heading, which has recently expanded to North America.

For other metric-impaired old Yankees like me, the Vector Compact is about 10 inches long, 5 inches wide, and weighs less than a pound — the “world’s smallest” by a lot. It can be pole mounted as shown in the press release, but it can also be surface mounted, in which case it’s only 1.6 inches high. And cabin top mounting may be more possible with this particular GPS compass due to the Vector line’s ability to overcome multipath issues. The reason you often see GPS compasses mounted at the highest point on a vessel — where you might want to place a navigation camera, lightning inhibitor and other gear instead — is because the technology for deriving heading from two nearby GPS receivers is quite sensitive to multipathing. I experienced this with the Furuno SC30 I tested years ago; it delivered the fastest, most accurate heading info I’ve ever seen — plus good GPS data — but when mounted on the aft cabin top, it would sometimes give up on Heading altogether, apparently confused by GPS reflections coming off the antenna mast. Hemisphere claims “enhanced multipath mitigation” and Anders Bergstrom of True Heading says the Vector Compact not only worked in a forest of masts but even under the cabin top of his fiberglass sailboat.
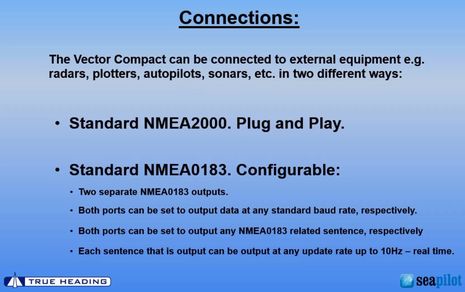
The NMEA 2000 version of the Vector Compact retails for $999, and its single N2K port provides power while outputting fast Heading, Pitch, Roll and GPS data. The NMEA 0183 version also cost $999, but it’s another $149 for the 15 meter cable needed to wire power and its two 0183 ports, which can be set up independently as shown in the screen above. Both versions of the device include an internal gyro that quickens the startup process, smooths heading output, and enables about three minutes of accurate “coasting” when passing under a bridge or a similar situation where GPS signals are temporarily lost.
Is there any downside to a truly compact GPS compass at about half the cost of existing models? Well, the Vector Compact’s heading accuracy is only rated at “better than 2 degrees (RMS),” while the Vector Carbon is 0.75 degrees, the Vector MKII 0.3 degrees, and the Furuno SC30 1.0 degrees. The Compact’s pitch and roll accuracy is 1.5 degrees and its GPS is good to 20 inches with 95% confidence if SBAS/WAAS corrections are being applied. All the specs sound good enough to me, and I look forward to testing one, especially given that no compass calibration is needed and a magnetic object put in the wrong place isn’t going to mess up radar overlays, autopilot, etc.
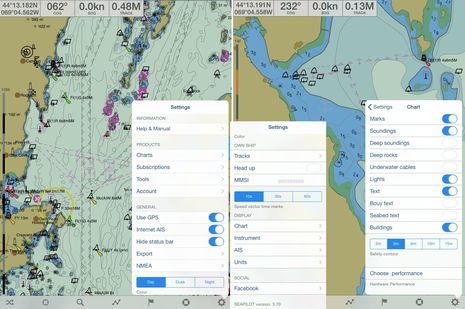
Detailed information on the Vector Compact GPS Compass is coming to the new us.seapilot website soon, but check out what’s there now. Front and center is a new U.S. version of the Seapilot app I first tried in Sweden. The U.S. version has the same rich feature set the European version does — that’s why I had to cut’n’paste to get the whole main Settings menu onto the screenshot collage above — but of course the official S57 vector chart data comes from NOAA. Seapilot prides itself on displaying S57 charts to the professional standard, and you can see some of the controls in the right most menu. One detail still needed, I think, is a Units choice to change depth readings from Meters to Feet, but otherwise I found the charts quite usable.
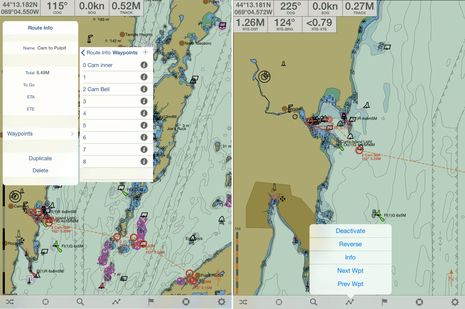
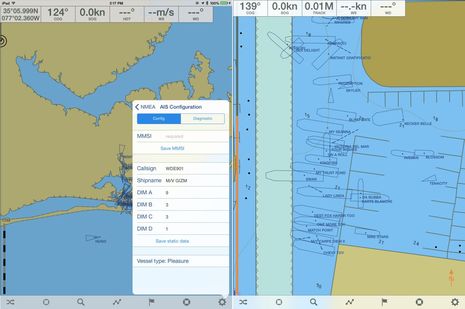
I also like Seapilot routing, and one neat detail that you can’t see on the screens above is how a waypoint you’re creating or editing is not directly under your fingertip but about a half inch above it, so you can see exactly where it is on the chart. And of course AIS is well supported in Seapilot as that’s True Heading’s main business. The app can display targets coming from either the Internet or an onboard AIS or both, and it can even be used to manage a Seapilot AIS transceiver, as suggested on the lower left screen. The Internet AIS, which is sourced from several services, doesn’t quite have the coverage of Marine Traffic right now, but it’s not bad, and Bergstrom promises improvements. Seapilot is also one of the few charting apps that can scale AIS targets when you zoom into them, but note that the Lauderdale megayacht dock scene below right does illustrate how that can get messy (unless all vessels displayed have a heading sensor active when stopped and have properly entered dimensions relative to the AIS GPS position).
The Seapilot app is priced in à la carte fashion and will probably be free with the Seapilot AIS devices once the whole plan rolls out. True Heading and their Seapilot recreational brand are on the move. They exhibited at the NMEA Conference, they gave AIS seminars durings the Fort Lauderdale Show, they’re putting together a U.S. distribution and tech support center, and they’re looking for more sales reps and more dealer/installers. I’m glad to have them here.








I am anxious for this to reach the US market. After rerunning calibrations of my Airmar GH2183 and Furuno PG-500 I am still seeing a significant difference between the two.
What capabilities does this provide that a $200 ZG100 does not?
Geez, Sparky, the Navico GPS/heading sensors seem like a great value for certain uses, but Navico doesn’t even recommend them for use with MARPA or autopilot:
https://panbo.com/archives/2013/02/navico_new_gpsheading_sensor_vhfgps_handheld.html
All of these GPS compasses work by taking measurements from two (or in theory more than two) GPS antennas and then doing a bunch of math. They get more accurate the further apart the two GPS antennas are, which is why this new smaller unit isn’t as accurate as the larger ones.
So why can’t someone sell a product that lets me install an antenna near the bow of my boat and two antennas aft, one port and one starboard, creating a triangle with a huge distance between the antennas? The large separation distance would mean an extremely accurate heading, and using three antennas would provide great redundancy.
And am I the only person with a sailboat GPS mounted far aft and far to port who finds it annoying that the Chartplotter always shows my boat 20 feed further aft and six feet further port than it really is due to the offset mounting location? The triangle of antennas above would save this problem as well.
An important thing that Anders Bergstrom brought up in his Lauderdale AIS seminar is the USCG ruling that would mandate AIS on many non-SOLAS commercial vessels along our coasts. This was first talked about in 2008 and I kind of gave up on it a couple of years after this 2010 rant:
https://panbo.com/archives/2010/03/uscg_ais_mandates_geter_done_please.html
However, the Rule making did get underway again this year and is purportedly in the last stage with possible publication in December:
http://www.navcen.uscg.gov/?pageName=AISFAQ#15
http://www.reginfo.gov/public/do/eAgendaViewRule?pubId=201410&RIN=1625-AA99
The rumor mill suggests that further delays are possible, and there’s no doubt that some of 17,000+ affected commercial vessels have already installed AIS voluntarily, but here’s hoping for a surge of AIS use along the U.S. coasts next year!
Please excuse my ignorance but does this product differ significantly from the $500 EV1 sensor core that comes with a Raymarine Evolution Autopilot system?
Jeff, my chartplotter, standalone GPS display and AIS system have offset settings for the GPS antenna. When I track my boat on VesselFinder.com, it actually has an scaled figure of my boat with the antenna shown in the proper location (Class A AIS)
No problem, Adam; it is confusing. Jeff got into what makes a GPS Compass unique in a comment above yours that also just went up and here’s a good explanation of the “bunch of math” that takes place:
http://www.cactusnav.com/newsdesk_info.php?newsPath=17&newsdesk_id=16
At any rate, a GPS compass has nothing whatsoever to do with the earth’s magnetic field, but a Raymarine EVO 9-axis heading sensor does. The EVO is using what’s called AHRS — Garmin has one now too — and involves three integrated 3-axis sensors, namely gyroscope, accelerometer and magnetometer. The technology is smart enough to correct for local magnetic deviation in most cases but it is subject to such deviation.
So the two heading technologies are quite different but you’re right that the results are somewhat similar. The EVO1, for instance, claims “dynamic accuracy to within 2 degrees in all conditions” similar to the Vector Compact. In fact, I’ve been using a Raymarine EVO1 as a heading device for over a year and it seems nearly as accurate and solid as the Furuno SC30 I tried, and I’ve never had to calibrate it. But it doesn’t output GPS info like a GPS Compass does and it is at least somewhat susceptible to magnetic disturbance.
Howard, I think you have a pretty sophisticated chart plotter. Furuno by chance?
But specifying GPS sensor location is mandatory when you program an AIS transponder. Which is why that last screenshot works as well as it does. The mistakes come from some installers not understanding how input length and beam relative to GPS sensor location and also poor heading info. I walked that dock in Lauderdale and didn’t see any megayachts stacked on top of each other 😉
Good explanation, thanks. In our rescue boat we have a startup protocol that requires us to check DOP values on the main MFD to ensure that we are getting accurate enough GPS signals for heading and location. Quite important when you are trying to locate someone in the dark at 40 knots, or run search patterns on an accurate course.
I’m assuming the Seapilot is still susceptible to inaccuracy due to DOP degradation. On the coast in BC there are lots of islands and mountains that rise up rapidly from sea-level so this is an important issue for us. It sounds like an EVO1 type device is better for heading data in some situations.
Yes, a TZ Touch 9″
20 inches? I doubt it, but see below.
This SBAS webpage gives different accuracy expectations:
http://sxbluegps.com/technology/sbas-made-easy/
It’s worth exploring the SXBlue website; they clearly think 20 inch accuracy is possible with WAAS corrections. Who knew? That’s amazing.
The FAA has a website which tracks GPS and WAAS accuracy for aviation use. They clearly expect WAAS accuracy to normally be between 0.5 and about 1 meter.
So I have doubts about my doubts. If the position accuracy of the Vector Compact is really that good, that alone is worth a DAME award.
Reporting accuracy as 3 degrees RMS is a convenient marketing habit, instead of stating the equivalent percent accuracy(at 95%) of 3 * 1.96 = 6 degrees.
http://www.navipedia.net/index.php/Accuracy
Jeff, Trimble offers a dual antenna input 220 channel GPS receiver which acts as a compass when two external antennas are connected.
It’s ruggedized and waterproof and extremely accurate (0.1 degree heading at 2m antenna distance). All Trimble correction services are available as options, so are Galileo and BeiDou support. Glonass is standard.
http://www.trimble.com/gnss-inertial/bx982.aspx?dtID=overview&
Norse, I just repeated specs but besides what you found on SXBlue let’s remember that the Vector Compact has TWO independent GPS sensors integrated with “a bunch of math”
Merlin, all the GPS Compasses seem to list their heading accuracy as RMS (for root mean square), and the Compact rating is 2 degrees, not 3. I looked at the Navipedia site and couldn’t find where you got the 1.98 multiplier.
Two internal GPS receivers … thats the detail I missed.
Ben, having two independent sensors adds very little to the accuracy since the errors due to ionosphere etc are shared, even with math. What makes the Vector Compact special is that it seems to read and use the error correction signals provided by WAAS better than other marine or consumer GPS receivers, at least as far as I am aware.
The FAA WAAS website I mentioned is here:
http://www.nstb.tc.faa.gov/
It has loads of info, but it assumes a lot of the reader. Dig around for definitions, explanations, etc.
Merlin is right about the 95th percentile being 1.96 standard deviations (see the table in the link he gave), assuming that the errors have a Gaussian distribution (I have no idea, but it’s a reasonable assumption). So the readings of this compass should be within 4 degrees 95% of the time. Which means 5% of the time it is not, and there are a lot of minutes in the day. So, that’s only good, not great, but good enough for many recreational boaters.
The Vector MkII accuracy at 0.3 degrees RMS is great. It separates the two antennas by 50 cm. The extra plastic is cheap — how much more is that model? Still, Vector Compact looks like a breakthrough product.
The cactusnav link is quoting from Furuno and is a bit disappointing, as if it was trying to make it sound hard rather than making it easier to understand. The big difference between consumer GPS receivers and the ones which surveyors use (such as Trimble) is that two GPS receivers are used together (such as with local differential GPS or GPS compasses) and they need to work with signal comparisons at the individual satellite signal level. Using the position output after it is calculated by the GPS is not good enough. Until now, that has meant there was an extreme price difference.
I take back what I said about more compass accuracy being just a few more inches of plastic. It’s a pretty safe bet that the Vector Compact uses a one piece circuit board, antennas and everything, and the OEM is Hemisphere. This one is the 15 inch long, 0.75 degree RMS, board which Vector Carbon seems to use:
http://hemispheregnss.com/Products-Solutions/Marine/vector-h102e284a2-gps-compass-oem-board-31
Can such a compass be paired with a magnetic compass and a priority set? Regarding compass accuracy I am mostly interested in it’s use for controlling the autopilot which means a permanent, static error (like deviation) is not so much of a problem but overswinging would be or generally inaccuracy due to the boat being pushed around.
Will this be better with a GPS compass and by how much?
When we traveled in the Netherlands inland canal Staande Mastroute, I activated the autopilot and stepped away from the wheel for about 20 seconds to check the paper chart under the dodger for the distance to the next bridge. We must have passed over a submerged powerline as the boat suddenly changed course by 30 degrees and this made us hit the canal wall before I could get back to the wheel. Fortunately the wall had a rub strake of soft industrial plastic that rubbed off on our gelcoat rather than the gelcoat on the wall so the damage was mostly cosmetic but still, avoiding one such incident can pay for the cost of a satellite compass.
However, what might cause a GPS compass to lose GPS reception and therefore heading? Will the internal magnetic compass take over gracefully (without causing a sudden course change) and what does it mean that this (coast?) mode will only last for a short time? What happens at the point where coast mode ends? Will the last valid heading be resent over and over, causing the boat to creep off course?
The manuals of my Simrad AC12 course computer and AP24 control head do not mention the possibility of connecting more than one compass, such as a GPS compass in addition to my Airmar H2183.
Henning, if you have multiple heading sources you need to choose which one is going to be used in the “Sources” menu. You can only switch over with the AP on standby, as the switchover is abrupt and would mean a sudden course change.
I use an Airmar PB200 and a Simrad RC42. My AC42 autopilot computer steers a little better with the RC42.
Jeff, be careful what you wish for…
Hemisphere sells several systems and OEM boards which would enable you to place two GPS antennas bow and stern (or wherever else you want). The heading accuracy is amazing: 0.17° RMS for 0.5 m separation, up to 0.01° RMS for 10 m separation.
http://hemispheregnss.com/Products-Solutions/Marine
Jeff,
What you are asking for already exists,
it’s called Olex Tripos:
http://www.olex.no/tripos_e.html
ftp://www.olex.no/pub/files/Tripos_sheet.pdf
The evolution of the GPS “compass” has benefited from the same technology changes as your smartphone. The GPS chipsets have gotten more and more sophisticated as the geometry has shrunk and throwing another half-million transistors at a problem is not hard. The thing that the compasses do is couple two receiver chipsets together so that all the processing is phase-coherent so the very tiny time-of-arrival differences can be used to compute the orientation of the antenna array. Fast, cheap processors have made this tractable for many fewer dollars.
one big difference between the high-end GPS compass and a more “recreation” grade unit is what is in the housing besides GPS units. Some have MEMS gyros and accelerometers so they can compute full 6-axis dynamics: pitch, roll, yaw, and at least heave, surge, and whatever the other is. (accelerations around and along the 3 axes) This allows inertial navigation during modest periods of GPS outage (passing under a bridge or the like. If all the components are sufficiently high-quality and updates happen quickly enough, that can form a full-blown AHRS as well, although I *believe* the products out there also include the magnetometers so that there is a source of “ground truth” for heading when GPS is transiently unavailable.
What I find annoying is that AIS units all have their own GPS receivers. They do it to get the timing information for the radio protocols – they could accept external position and orientation data but very few of them do. In fact, there’s no reason very accurate time couldn’t be distributed via Ethernet and IEEE1558 so an AIS wouldn’t need anything other than a VHF RF connection if that service was available.
-mo
Hi all, Mike’s reference to how GPS clock info is used for AIS transmission timing began a side conversation that had nothing to do with satellite compasses so I moved it to the Forum:
https://panbo.com/forum/2015/01/using-gps-for-ais-timing.html
PLease advise where I can get the seapilot vector compact GPS compass in the US?
The NMEA 2000 version of this GPS compass is now available as Simrad HS60.
http://www.simrad-yachting.com/en-US/Products/Compasses/HS60-GPS-Compass.aspx
As stated above it’s made by Hemisphere GNSS, the Hemisphere model names are Vector 104s (NMEA 2000) and 104n (NMEA 183)
http://hemispheregnss.com/DesktopModules/EasyDNNNews/DocumentDownload.ashx?portalid=0&moduleid=519&articleid=89&documentid=518
The compass has a rate gyro which will maintain the heading within 2 degrees rms for up to 3 minutes GPS outage.
The COAST technology will maintain sub meter position accuracy for up to 40 minutes with loss of SBAS (WAAS) correction data.
I will install a HS60 tomorrow.
Abbor, do you have a Airmar GH2183 to compare to the SC60? I am interested in upgrading my heading sensor, but dont have the room or $$ for a Furuno SC30.
Ben or others who might be able to help, I’m not clear on how to change the heading input for my Raymarine S3 SmartPilot (with rate gyro option). This is in my 52′ steel monohull sailboat and currently uses the standard Raymarine Fluxgate compass but this has always struggled to work consistently in this big steel boat. Also using things like chargers for our laptops or turning on some devices in the galley, sends the fluxgate heading into a circular tizzy.
In part to remedy this problem I have installed an Airmar PB200 and have it mounted at the top of the mast and connected to the navivation system (e7D) via the airmar supplied 100′ NMEA2000 cable. Seems to work fine BUT the part I’m not currently able to figure out is how to have the heading from the PB200 be what goes to the Raymarine Autopilot?
I read some comments above about simply switching sources, but don’t seem to find how to do so on either my e7D or the AutoPilot head? I have both the ST60+ and the newer P70 control heads)
My wife and I are prepping for our upcoming passage from here in Fiji to Vancouver and so I’m very anxious to have a very reliable and accurate heading data going to the autopilot. Any instructions ideally from someone who has done this change or links to instructions online would be MOST appreciated.
Thanks Ben and all the many contributors here for the years of great learning you have and continue to provide. Also MUCH appreciated and valued.
Wayne & Christine Hodgins
s/v Learnativity
currently on the hard in Vuda Pt. Marina, Fiji
Wayne,
Not sure whether they improved on this but a few years ago Raymarine didn’t offer much in terms of switching input sources.
Why don’t you physically disconnect the fluxgate? If there is only one source of heading it should work, me thinks.
Did you try using the Raymarine Technical Support Forum? They seem quite good about answering questions of this kind.
http://raymarine.ning.com/
Thanks Kees. I’ve tried that but what I can’t seem to find is how to then tell the S3 Autopilot to use the PB200 heading data in place of the missing Fluxgate heading?
But I’ll try again to just disconnect the fluxgate and see if the e7d and S3 will then automatically use the only heading data available which is from the PB200.
I’ve sent question into the Raymarine site and am hoping to hear back from them soon too.
Thanks again to both you and Quista for taking the time to respond.
Wayne
Hi Wayne,
Have you been succesfull using the PB200 on the S3G pilot?
I´m considering to upgrade my S3G with a NMEA Compass.
Hi Wayne,
My S1 Tiller Pilot installation manual says the course computer first looks for a fluxgate compass then NMEA, then SeaTalk so disconnection of the fluxgate – or a switch – is all that is required for the AP to use the NMEA compass.
I’m planning on a switch for easy redundancy.
http://www.busse-yachtshop.de/pdf/ray-s1-s2-s3.pdf
Best
Patrick
Patrick,
I´m sure you have to disconnect the Fluxgate to force the computer to read NMEA.
Then is the question what speed, buffer and god knows what?
Talking to Raymarine support has been of no use. Never a clear answer. Instead it sound like the are saying it will be a problem….??