
Simrad ForwardScan (B&G too): a breakthrough even in beta testing
 On Monday I got to poke around Baltimore Harbor with a beta test version of the Simrad ForwardScan announced last spring (discussed here on Panbo) and also introduced recently as B&G ForwardScan. Navico’s sonar product manager, Matthew Laster, brought along several versions of the NSS evo2 software that supports the new forward looking sonar (FLS) transducer, but loaded the latest, saying, “It hasn’t been tried on a boat yet, but I think it’s quite stable.” In fact, it was darn stable and I was quite impressed with what I saw…
On Monday I got to poke around Baltimore Harbor with a beta test version of the Simrad ForwardScan announced last spring (discussed here on Panbo) and also introduced recently as B&G ForwardScan. Navico’s sonar product manager, Matthew Laster, brought along several versions of the NSS evo2 software that supports the new forward looking sonar (FLS) transducer, but loaded the latest, saying, “It hasn’t been tried on a boat yet, but I think it’s quite stable.” In fact, it was darn stable and I was quite impressed with what I saw…
Once the updates were installed, the Simrad NSS7 evo2 home screen, seen above, got that ForwardScan icon as did the NSS16 on the flybridge. That’s because FS is fully networked over Ethernet like most every modern sonar product, but notably unlike the EchoPilot FLS I’ve been testing since early August. The EchoPilot Platinum Video, which is the only other FLS system similar to ForwardScan currently available (I think), also involves installing two powered black box modules while FS requires none…

Here’s a look at the $799 FS hardware kit that is scheduled to ship at the end of October. Whereas I’d already installed an Airmar B617 bronze version of that same retractable stainless housing, I only had to pop in the new transducer and run the 30-foot cable up to the NSS16. I would have used the port on the nearer NSS7 but it’s already occupied with a StructureScan HD transducer. (Both units also include sonar ports and processing.)
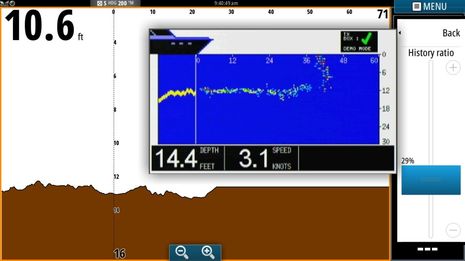
Perhaps the most significant difference between the Navico and EchoPilot FLS products is that ForwardScan attempts to translate the pings received back into a solid profile of the bottom ahead. There are many other differences — like the ability to adjust the percentage of screen showing a fishfinder-like historical bottom profile — but it’s the interpolated solid view that makes FS easy to understand and useful at a glance.

Personally, though, I wouldn’t be happy if ForwardScan only showed its guesstimated bottom profile. “What raw data is that based on?” my skeptical mind would be asking. But the designers handled this perfectly, I think, providing a “Data point” menu that lets the user alternatively overlay All the raw data or just the Objects above the interpolated brown bottom. The screen shots below were taken in All mode largely because it illustrates how the profile algorithm works, but it’s also how I’ll probably use FS for real gunkholing.
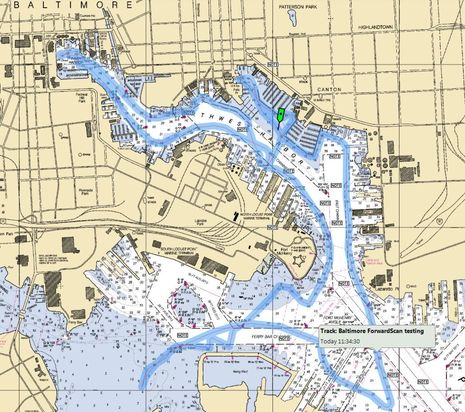 Not that Matthew and I didn’t nose around some dicey areas of Baltimore Harbor, and wasn’t that fun! You can see by the track above that we were rarely in the dredged channel or on the correct side of the nav aids, but that meant we got some great closeup views of this busy and fascinating port. And isn’t that what the freedom of boating is partly about and what a tool like FLS can help make easier? (By the way, NSS evo2’s ability to save a geographical region of tracks and waypoints as a GPX file made this Coastal Explorer screen fairly simple to make.)
Not that Matthew and I didn’t nose around some dicey areas of Baltimore Harbor, and wasn’t that fun! You can see by the track above that we were rarely in the dredged channel or on the correct side of the nav aids, but that meant we got some great closeup views of this busy and fascinating port. And isn’t that what the freedom of boating is partly about and what a tool like FLS can help make easier? (By the way, NSS evo2’s ability to save a geographical region of tracks and waypoints as a GPX file made this Coastal Explorer screen fairly simple to make.)
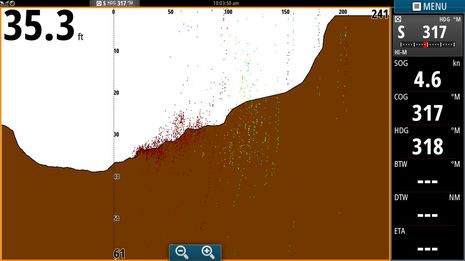
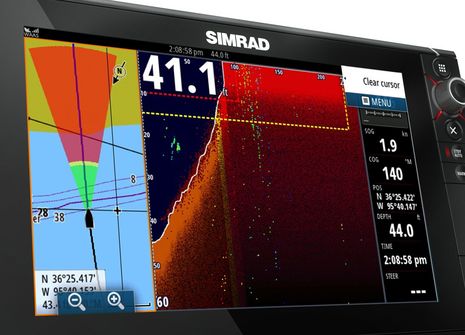
So here’s ForwardScan profiling a rapidly shallowing bottom about 200 feet ahead. That’s about 6 times the 35 foot depth under Gizmo’s keel, which is the sort of performance I saw consistently at such depths and in line with Simrad’s claim of maximum 8x forward view, nominal 4-5x forward view (though oddly B&G claims 10x, which should be corrected). Note that the 241-foot forward range shown on this screen is a little glitch that will likely get fixed before this software goes public (it was adding the 1-foot offset I’d applied to the sonar transducer)…
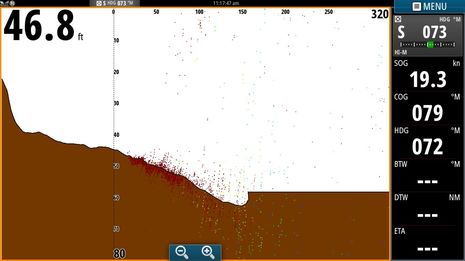
We’d zeroed out the pesky offset by the time this screen was captured, but the more important news here is that we were doing 19 knots and still getting data points beyond the 150-foot range that FS felt comfortable profiling. What the screens don’t show is how fast ForwardScan is working; the raw data changes rapidly with changing bottom and heading, and sometimes the distant bottom profile dances around as the algorithms struggle to make sense of it. Navico should make a video!
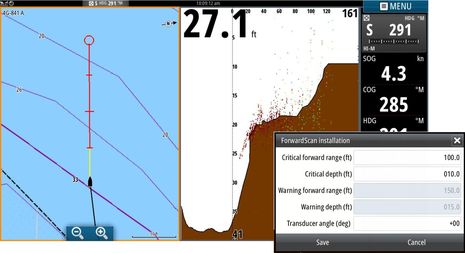
Here’s a good example of what can be done when FLS is deeply integrated in an MFD. In the ForwardScan Installation menu you can establish a “critical” forward range and depth that can show as red on your boat’s heading extension line in a chart window. A yellow warning range and depth is automatically set based on the “critical” number. Note, too, that if your transducer install isn’t vertical fore and aft you can correct about 10 degrees of error either way.
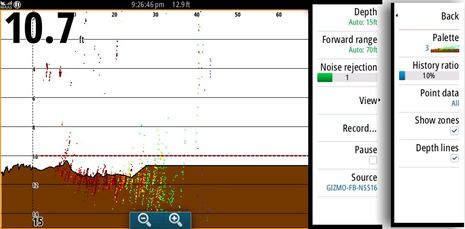
Here’s the ForwardScan main menu and View sub menu. Auto ranging works well and is in small enough increments that the screen area is well used. There are times, though, when you might want to manually change depth or forward ranges and the current scheme of doing both at once with the plus/minus buttons on the main screen seemed awkward. Maybe there should be two manual range controls on the main FS screen? I’m also lobbying for an “A” button so you can return to complete Auto mode without having to click down a couple of layers.
This screen, incidentally, was taken at Gizmo’s current marina slip, and I think the close “targets” relate to a large piling that seems slightly outside the 15 degree wide FS beam. Kelp, perhaps? Meanwhile I’m pretty sure the vertical data points at 40 feet show the sailboat that’s tied up perpendicular to me across the wide face dock. Matthew thought we saw fish sometimes in FS, though Navico is not marketing the technology in that direction (yet?), and he allowed that it may be possible to adopt the bottom profiling algorithms to “fill in” objects in the water column. Interesting!
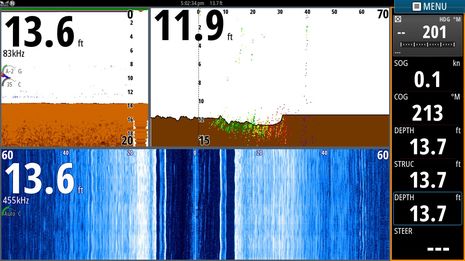
Here’s the NSS16 showing sonar, ForwardScan, and StructureScan all at once — three transducers, no black boxes. However, the shot also illustrates what seems to be a bug that I noticed but couldn’t verify before FS. The large depth numbers in each is purportedly generated by each transducer and the 1.7 foot difference between sonar and FS makes sense as the transducers are about 20 feet apart and the slip is slightly shallower at the bow. But the SS transducer is also mounted near the bow and should read quite close to FS; instead, it’s using the sonar number. Note that each of the three independent depth values can be accessed in a data bar — like the “STRUC” number above — which could be a valuable feature once Navico squashes the bugs.
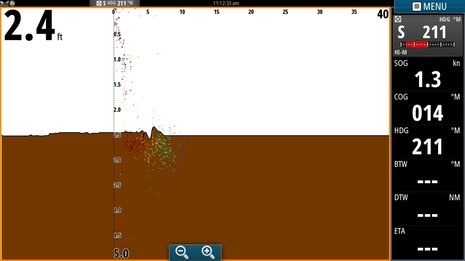
But I’m getting off track. The bottom line with ForwardScan is that it seems to have raw performance similar to what I’ve seen with EchoPilot FLS — i.e. keep your expectations modest — but Navico has truly advanced the data display, while significantly lowering the cost and install hassle. In regard to expectations I’ll close with a shot taken in extremely shallow water and mud bottom. FS couldn’t see very far and like EchoPilot, I’d say forward ranges at depths of 10 feet and less often slide into the 3X range. But we did image the gnarly wires hanging off that old barge (below), and I’ve got a lot of Chesapeake Bay and ICW to do further testing in.
Meanwhile, I’m now at the NMEA Conference and realized that I somehow missed the introduction of Raymarine CP200 SideVision. But hopefully, I’ll get to see it in action behind Sanibel Island tomorrow. The great sonar war rages on!

PS 12/5/2014: I finally scored a good image of ForwardScan improvements I saw at the Lauderdale show. The color-coded FS heading line is now an “ice cream cone” shape that also indicates the beam width of the transducer. They’ve also added some coloring to the bottom imagery that doesn’t show very well here but is useful. Plus I observed that the algorithmsare now drawing bottom at greater ranges. All good:








Did I read correctly that ForwardScan can also be connected using a black box and would then support MFDs other than NSS evo2 (like NSO evo2, old NSO, old NSS, even NSE)?
And what about Lowrance products?
And does the ForwardScan transducer include or replace a standard depth transducer or do you need to drill another hole in any case?
Hi, i saw you managed to get some echoes of the hanging wires from the barge. Do you think you would be able to detect a partially submerged container and trigger an alarm?It could be a very useful tool then even on open sea passages.
Paul:
This is just my personal opinion but our about 6000nm of open sea passages of the last 12 months have made me give up my hopes for an alarm like this on the kind of boats that we use.
– In conditions other than a dead calm you can expect swell/seas of 3 to 8 feet. 20 knots of true wind from the aft quarter, about 15 knots apparent, pretty much the best conditions you can ask for, will give 8ft seas or close to that. Since the sonar beam cannot pass through air in the troughs, it can really only see as far as the wave you are on or the one directly in front of you, on average maybe something like 100ft.
– At 6.5 knots you will cover 100ft in about 9 seconds. From that you have to subtract maybe 3 seconds to allow the boat to make a 60 degree course change following your turning the wheel hard over, in order to avoid the container. Then you will need at least 2 seconds to locate the container visually to decide which way to turn the wheel for the best chance to avoid it. My wife and I have spent almost all time on passage below at the nav station with the companionway fully closed (because the aft winds would otherwise funnel down into the cabin, getting everything damp and cold and uncomfortable). I cannot see how I could have woken up from my slumber, realized that this alarm is for real (not a false alarm like the last 10), gotten up from my seat, opened the companionway hatch and door, dashed to the wheel and disengaged the autopilot inside of the remaining 4 seconds.
– At night, if you can’t see the container, you won’t be able to decide which way to turn so in spite of a perfect alarm, you may not be able to take avoiding action.
– This is all assuming that, in addition to an excellent forward looking sonar, you have a perfect alarm that interprets the sonar image as good as you could yourself to determine a large submerged object is present and do this taking no time at all. My guess is that, because of the tiny number of people doing open sea passages, we will all have robotic assistants fulfilling our every wish and speaking perfect english before such an alarm comes around. Without the alarm I have no hope that I would notice a container on a sonar image because no one can stare at a screen with full attention for 4 hours without interruption.
Ben thanks for the great presentation at Trawlerfest! Here’s the $20,000 money question, at least for me. If you plug this into an EVO2 can your non-EVO NSSs see the screen output?
Thanks, Dave, but I’m pretty sure the answer is no. I did ask if ForwardScan running through a SonarHub…
http://www.simrad-yachting.com/en-US/Pressreleases/2013/Sonarhub-Sounder/
…would work with pre evo2 NSS and Matthew Lasser said no. (By the way, the SonarHub will be needed by B&G Zeus2 owners who want FS, or owners of a single Simrad evo2 unit who’s already using the port for StructureScan.)
Matthew did say that they’re hopeful about ForwardScn spotting containers, but I doubt it can be done consistently or at much range.
Do you have a video of it?
thx, very interesting.
I saw some real ForwarScan improvements during an on-water demo in Lauderdale, but I didn’t take a video. Fortunately David Schmidt caught some of the latest Simrad booth demo footage here:
http://on.aol.com/video/simrad-forwardscan-at-the-2014-fort-lauderdale-boat-show-518526319
What’s different from the software I tested is that the depth-sensitive heading line is now an “ice cream cone” shape that also shows the ForwardScan beam width. They’ve also improved the algorithm that identifies bottom shape so that FS seems to “see” a little further ahead and they added some useful color to bottom fill. All good.
Fun fact: the actual ForwardScan file used in the booth demo and now in store displays I think was recorded on Gizmo outside Baltimore.
Just added a Simrad ForwardScan image showing substantial software improvements I saw in action at the Fort Lauderdale Show.
Hello Ben,
So, any news regarding ForwardScan from your visit in South Florida this week?
Yes, Xavier, I was surprised to learn that ForwardScan hasn’t shipped yet. Apparently during the Fort Lauderdale Show demos they ran into problems with interference from other transducers that hadn’t surfaced before. But they had it running fine on at least two boats at Hawk’s Cay and said that release should be very soon. It’s an odd situation for me as I saw it run pretty well all the way from Baltimore to New Bern on early code.
Ben have you the chance to review the Echopilot 3D?
Jack, I’m afraid that won’t happen as Echopilot 3D involves a fairly elaborate transducer install. In fact, I don’t think it’s ever even been demonstrated here in the U.S. However, Gemeco Marine does distribute them here and they’ve told me that they have several happy 3D customers. I’d call them for more information and perhaps contact with a user. Gemeco may sell the product but they are also straight shooters.
Hello Ben,
You wrote: “I’d already installed an Airmar B617 bronze version of that same retractable stainless housing, I only had to pop in the new transducer.”
Bronze housing, stainless nut on the sensor itself?
How’s that going to work, galvanic-wise?
Just curious. I happen to have a bronze housing already installed, makes me nervous to wait 1.5 years until the next haulout to remove the bronze, install the stainless.
Cheerio,
Hi Xavier, I hadn’t really thought about that, but I checked the transducer install today and everything looks fine. I was even able to unscrew the stainless nut a bit with just a bit of pressure, so I’d say there is zero sign of corrosion. The forward bilge is quite dry and Gizmo has never shown any galvanic issues, but the transducer has been in the water since early Oct. 2014.
Hello – really useful article. I have a Hanse 455 and want to install FS (matched with eth B&G Zeus 2). Do we need to drill a separate hole into the hull for the stainless steel through-hull mount (ie so i have FS IN ADDITION TO the existing depth sounder) or is FS reliable enough to give depth info directly below the boat like a traditional depth sounder? Thanks, Paul
Hi Paul, In my experience, ForwardScan delivers reliable Depth data at least to 100 feet and I’ve seen it holding bottom over 200 feet. Moreover, the Depth value is separate from the forward scan data in the sense that it goes out on the NMEA 2000 network and can be seen on instrument displays and other screens.
However, unlike a traditional depth sounder, the FS transducer has to be very close to vertical both fore and aft and athwartship in order to deliver an accurate profile of the bottom ahead. It’s also good to place it fairly far forward because it can’t see all that far ahead, as discussed above. But I’ve seen modern fin keel sailboats like yours where the depth transducer is on center ahead of the keel and should work pretty well.
Hi Ben, do you have any new experience with this product? I have it on my b&G and havnt really played with it yet, is it worth the time and energy?
Yes, I ran Navico (Simrad and B&G) ForwardScan for years and found it quite useful, but mostly when I already knew I was in thin water. Then I switched to a Garmin Panoptix PS51 which is quite similar, but with slightly better range and speed at a much higher cost.
Thanks for the feedback, I understand that the latest b&g software release has improved it, I will give it a try.