
MIBS2020: Furuno TimeZero Touch 3

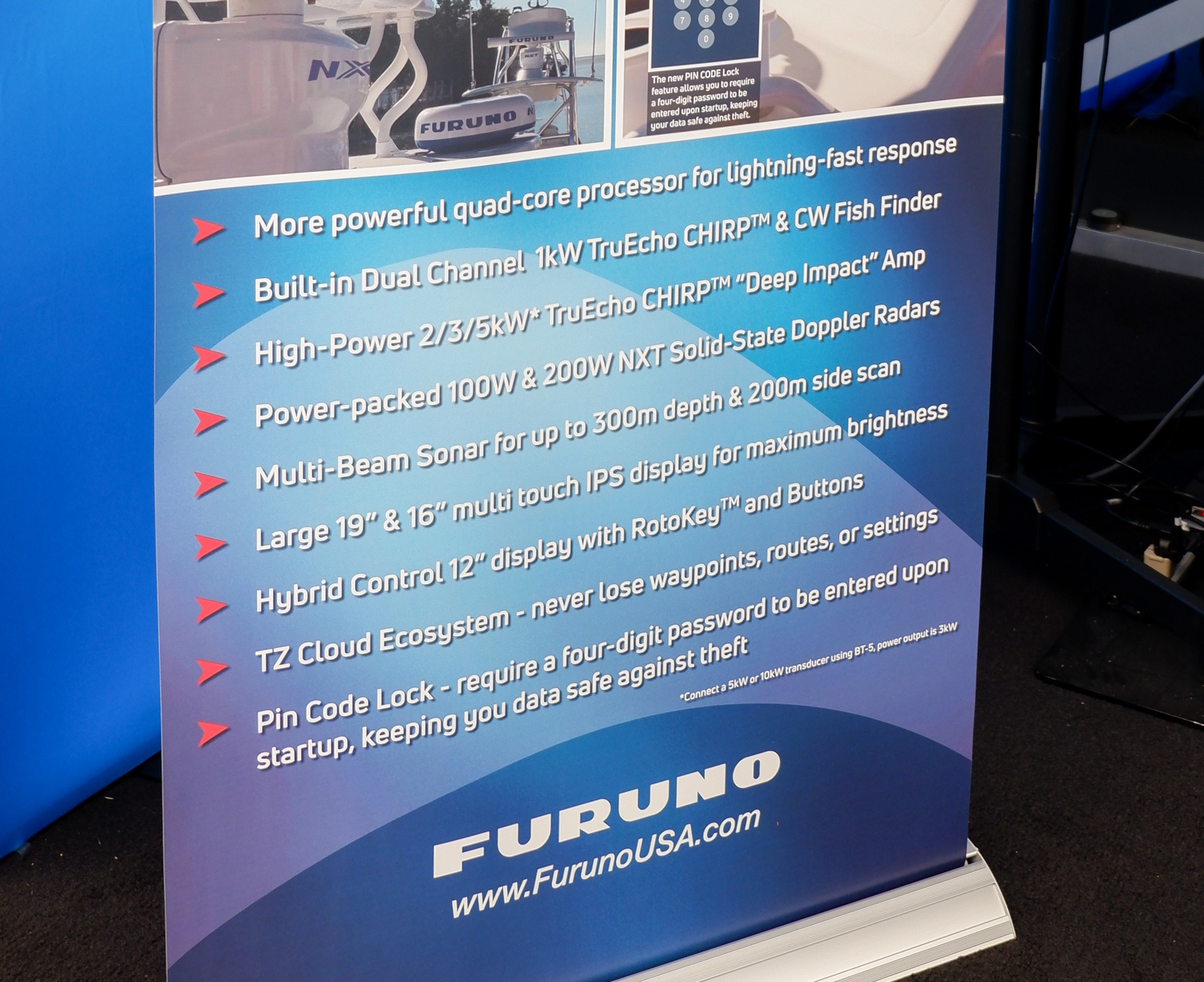
It’s always exciting when a new series of MFDs is announced and Furuno’s TimeZero Touch 3 is no exception. As you can see Furuno is promising quite a few improvements with TZT3. Furuno has also announced higher powered open-array, solid-state radar units and the availability of their SCX20 and SCX21 satellite compass.

Initially TZT3 MFDs will be available in 12, 16 and 19 inch display sizes. The 12 inch MFD has hybrid controls with both touch and physical button and knob interfaces. The 16 and 19 inch MFDs are touchscreen only but Furuno offers three different button remotes that work with the TZT3 MFDs and can be seen in the top photo above.
I think one of the biggest deals is what Furuno is calling the TZ Cloud Ecosystem. With TZT3 Furuno now has an impressive array of products that work together from TZT2 and TZT3 MFDs, TZ iBoat mobile app, TZ Cloud web platform and TimeZero Navigator and TimeZero Professional PC software. TZ Cloud allows waypoints, routes, photos and zones to be synchronized between all the TimeZero products. The synchronization is seamless and quite fast with a newly created item reflected across all (internet connected) devices very quickly.
Furuno has also announced the DRS12A-NXT and DRS25A-NXT solid-state open-array radars. The DRS12A-NXT is a 100 watt radar with performance similar to a 12 kw magnetron array and the DRS25A-NXT is a 200 watt radar with performance roughly equivalent to a 25 kw magnetron. These radars are compatible with TZT2 and TZT3 MFDs.

Rounding out Furuno’s announcements is the Deep Impact DI-FFAMP. This amplifier connects to the internal 1 kw sounder in a TZT3 MFD and allows you to amplify the sounder to 2 or 3kw (depending on the transducer) for better deep water performance. If you already have a TZT2 system on your boat and want to take advantage of the DI-FFAMP Furuno says that you will be able to introduce a single TZT3 MFD on the network, connect the DI-FFAMP to that MFD and the sonar data will be available on all TZT2 and TZT3 MFDs on the network.
Furuno says the new MFDs will be available in mid to late March.








I’m excited to see the TZT3. However, for those folks who have TZT2’s (like I do) and use TimeZero Professional / Navigator….. TimeZero v4 has been out over a year, and does not work with TZT2. I’ve asked Furuno for updates repeatedy on when they will release software so that you could take advantage not only of the cloud features, but a ton of other fixes and upgrades in TimeZero v4, and they have been unable to provide any specific date.
The most recent update indicates they will start working on updated software for the TZT2 once the TZT3 comes out. So it sounds like for this boating season, we’ll still be stuck using TimeZero v3 with TZT2 and not be able to take advantage of any of the cloud features….
Steve, what do you mean by “doesn’t work”? TZ PC v4 radar module doesn’t work with Furuno radar? TZ PC v4 routes don’t sync with TZT2 on boat network? TZ cloud sharing doesn’t work with both? All of the above? I’m quite curious because TZ PC, TZT2 MFD, and NXT radar will be Gizmo’s primary nav system soon.
Good point, I didn’t list out all of the details.
There are essentially three versions of software involved – one for TZ on the PC, one for the TZT2 and then the iPad running TZ iBoat.
The cloud sync features only work when you have v4 of TZ on PC and the latest version of TZ iBoat. No released version of software works with the cloud for the TZT2. TZT3 is supposed to work when it releases.
TZ on PC v4 does not work with TZT2 in a number of ways. You can’t sync waypoints or routes without manually exporting a file, putting it on an SD card, and importing it into a TZT2 (which you could do with any MFD given a generic file export) or vise versa – exporting routes from TZT2 to TZ on the PC. I’ve tried v4 TZ on the PC with TZT2s and some of the autopilot stuff also gets weird and unstable.
The radar works fine with any of the combos I’ve tried, although you can get into some situations where one wins over the other. The sync and communication protocol between TZ for PC v3 and v4 has changed, which is what is causing these issues.
Rendezvous primary navigation system is two TZ Pro copies running on separate PCs, two TZT2s, a NavPilot 300 autopilot, and DRS4D-NXT radar (plus a bunch of other smaller bits of course).
The primary reason I loved this setup, other than reliability and the quality of the radar, is the ability to plan courses and routes on the PC, and have those appear on the TZT2’s so that while I’m underway, I can rely on that hardware to do the driving, while also still having TZ on the PC to make changes and interact with other things.
Using TZ for the PC v4 with the TZT2s, you lose that sync functionality, and I’ve seen some weird behavior if you use TZ to run routes, or if you change the routes on the TZT2, which can happen while underway.
The cloud features would be nice so that I could plan on TZ iBoat, or share my routes with friends who also use one of these, but I’d rather have the local sync and autopilot stuff working first.
For now, I run TZ on the PC v3, TZT2 v6.28, and don’t use TZ iBoat at all other than random planning when I don’t have the PC. Everything works well together, including the DRS4D-NXT radar from either the TZT2s or PC.
Thanks for the details, Steve. Glad about the radar, my #1 concern, but a bit bummed about the on-boat and cloud route syncing.
I just learned that Furuno and Timezero are no longer offering Navionics charts which is a tragedy. I’ve been an ardent fan of C-Map and have found recently that C-map charts are missing critical harbor data that they used to have in older chart editions Imagine my shock planning a trip to learn that even though I plotter shows previous paths into harbors, the current C-Map chart doesn’t show any depth information. Imagine my double shock learning Furuno and Timezero no longer offer Navionics which has the missing data
While that does sound bad, I suspect that the depth data is there in the data files but not being displayed for some reason. Are you seeing this on PC TZ or a Furuno MFD? And for what area? Howrecently did you update the MapMedia C-Map files?
I see the same on both my TZ2 display and my PC. I have the most recent updates of the C-Map charts. The areas I have noticed are the north coast of the Dominican Republic, The eastern banks of Turks and Caicos, and LeHave River in Nova Scotia. I’ve looked at the C-Map online chart viewer and see the issues exist with C-Map, not Furuno/TimeZero. I was told that C-Map would regenerate the chart info for the DR coast and T&C banks by November. Leery of more surprises.
Regarding Navionics, apparently Navionics has discontinued allowing third parties to use their data. I think this primarily impacts Furuno/Timezero.
Don’t what to make this a bigger deal. Nonetheless, I wonder if there was an impact on C-Map with its purchase by Navico.
“Regarding Navionics, apparently Navionics has discontinued allowing third parties to use their data. I think this primarily impacts Furuno/Timezero.”
The statement above doesn’t match what I’ve heard recently from Garmin about Navionics data availability, but it’s possible I missed something. I’ve emailed Garmin asking for clarification on what’s available and what changes have or have not been made to data availability. I’ll be back with an update as soon as I hear from them.
-Ben S.
Well, it appears chart availability is getting tougher for third parties in the post-acquisition world for Navionics. Here’s the reply I got from Garmin:
I’ve also previously heard from industry sources that both Navionics and C-Map have eliminated the OEM discounts that previously made it economical for MFD manufacturers to bundle charts with a new MFD. This will surely lead to fewer MFDs coming bundled with Navionics or C-Map charts and more expense to the consumer to buy an MFD with those charts.
-Ben S.
Ben,
Somehow my reply seems lost. If it’s a duplicate just delete one.
I looked on the C-Map online chart viewer and see the data is missing on C-Map as well as one both my TZ MFD and TZ PC ( have the most recent C-Map charts). The areas I was alarmed by are the North Coast of the Dominican Republic, in particular the Luperon Harbor and Ocean World Marina, the western part of the Turks and Caicos Banks, and the LaHave River in Nova Scotia. I suspect there are more just waiting to bite at the most inopportune time. I believe this is not operator error, nor an issue with Furuno or Timezero.