
Avikus’ autonomous boat navigates, pilots, and docks itself

In a last-minute addition to my Fort Lauderdale International Boat Show (FLIBS) schedule, I was invited to take a ride on Avikus autonomous boat. Boy, am I glad I did. Despite being a pre-production system, what I saw and experienced was the most polished example I’ve seen to date of assisted boating.
Avikus is a subsidiary of Hyundai Heavy Industries focused on autonomous vessel control systems. Hyundai Heavy Industries is the largest shipbuilder in the world, so their interest in autonomous boating extends well beyond recreational boating. Currently, Avikus’ offers two products: HiNAS or Hyundai Intelligent Navigation Assistant System for large ships and NeuBoat for leisure boats.

In June of this year, the 122,000 ton bulk LNG carrier Prism Courage completed a 20,000 kilometer transatlantic voyage using Avikus’ HiNas system. Avikus says the ship reduced fuel consumption by 7-percent and emissions by 5-percent due to the increased efficiencies of the autonomous system.
Although some level of autonomy seems likely in everything we do, I think the future of autonomy in recreational boating is cloudy. I believe boaters are looking for assistance with the most stressful parts of boating but also enjoy operating their own boat. On the other hand, recreational boating is a great proving ground for Avikus’ autonomous control systems. The sort of close-quarters boating encountered by recreational boats gives Avikus the opportunity to refine their collision avoidance and close-quarters maneuvering algorithms for vessels of all sizes.
Avikus is an engineering focused company. The vast majority of the representatives I met are developing the system, not marketing it. As a result, some of the details aren’t as clear as I might like. But, my demo ride left me with clarity that they have a true autonomous vessel control system working. Plus, that system looks very polished and close to ready for consumers.
The system

My demo ride took place on a Quicksilver boats Pilot House model with twin Mercury 250 horsepower outboards with a joystick control system. There was no thruster on the boat and the boat appears equipped with a pretty standard set of navigation electronics for a boat of its size. The most noteworthy thing about the boat was the lack of large sensors or other protrusions. Nothing about the boat, except maybe the Avikus logo, identifies it as markedly different from any other boat on the water.
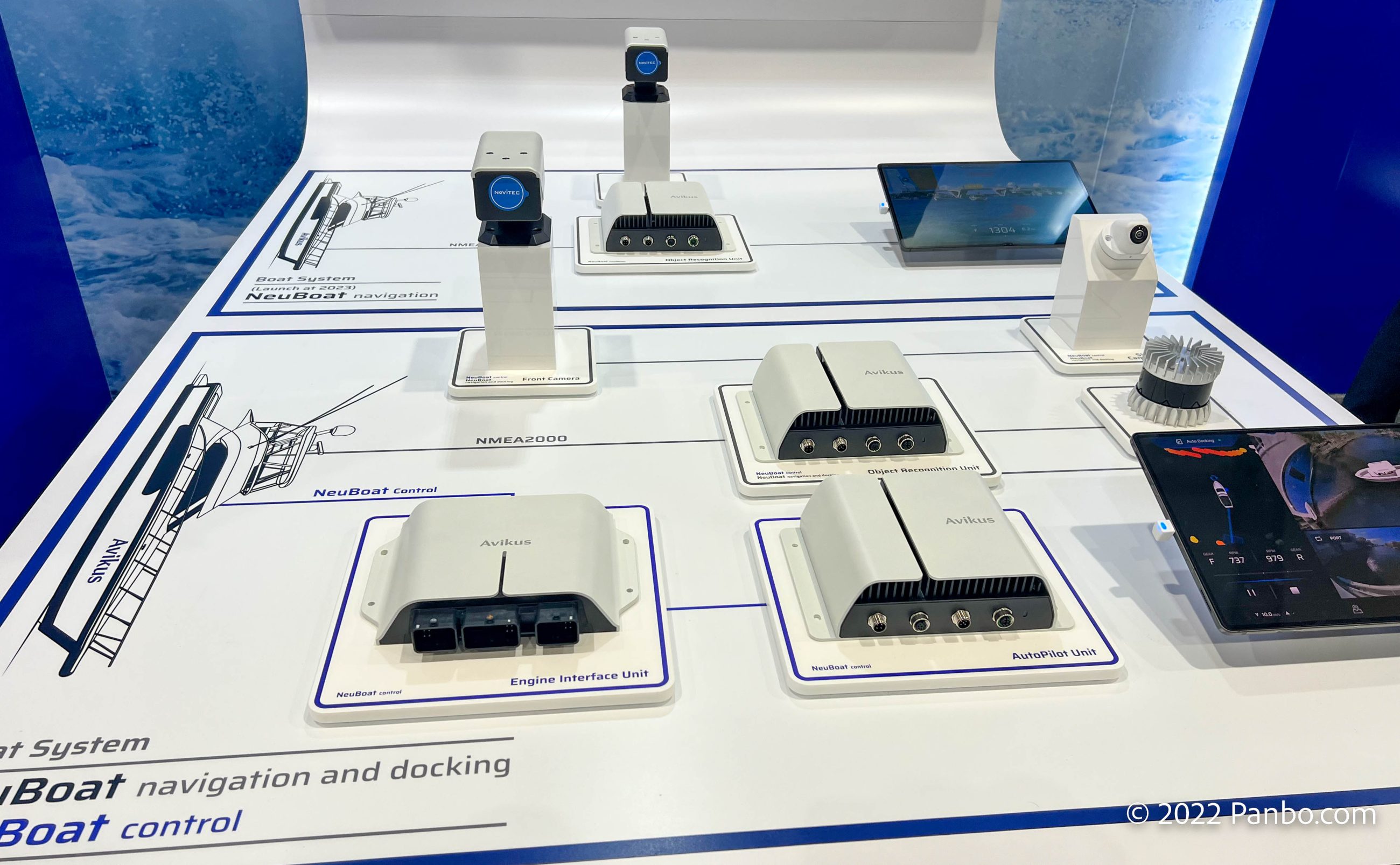
The display at the booth describes three levels of the system: NeuBoat navigation, NeuBoat navigation and docking, and NeuBoat control. Based on what I saw at the booth I got the sense there are two level one autonomy assistance options. Level one autonomy includes aides to the operator while level two and greater autonomy systems directly control the vessel.

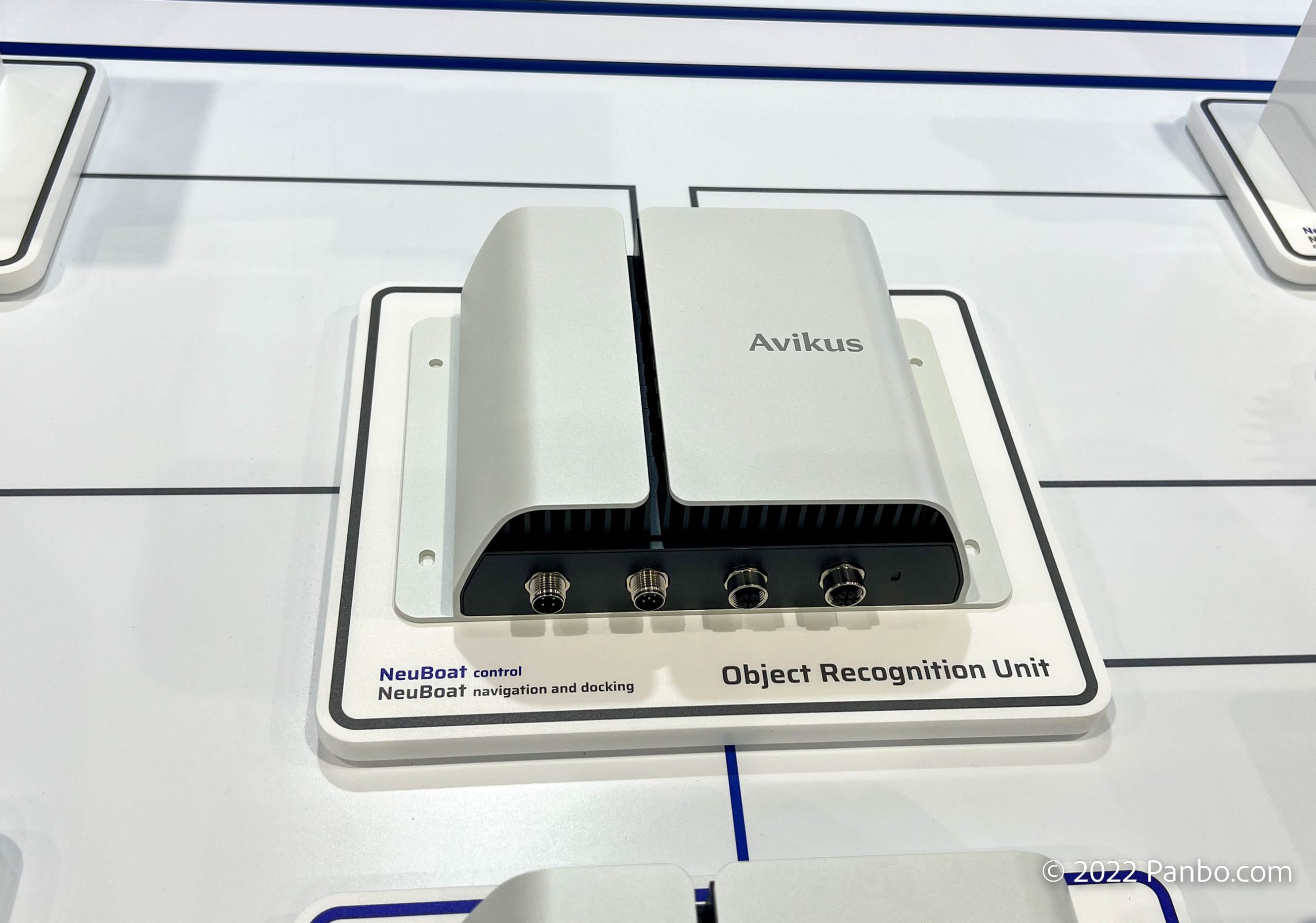
NeuBoat Navigation utilizes a forward camera, the boat’s NMEA 2000 network, and the GPU (graphics processing unit) powered object recognition processor to navigate and alert the operator to potential hazards. Navigation is the only configuration that doesn’t include a lidar sensor, which is used to map the objects around the boat and measure their distance. So, without lidar, I’m not sure if Navigation will be able to display distances as shown in the image at the top of the article.
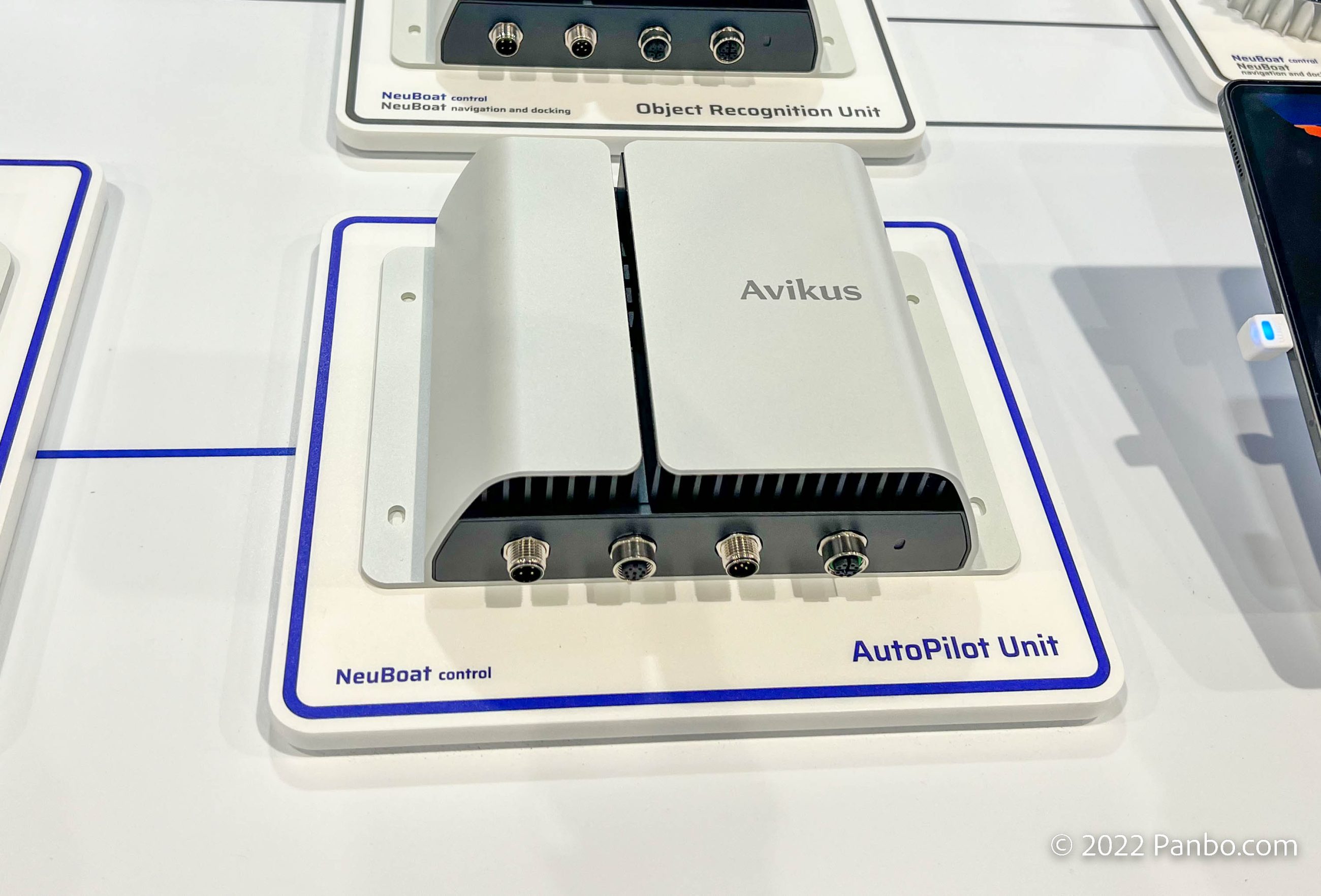
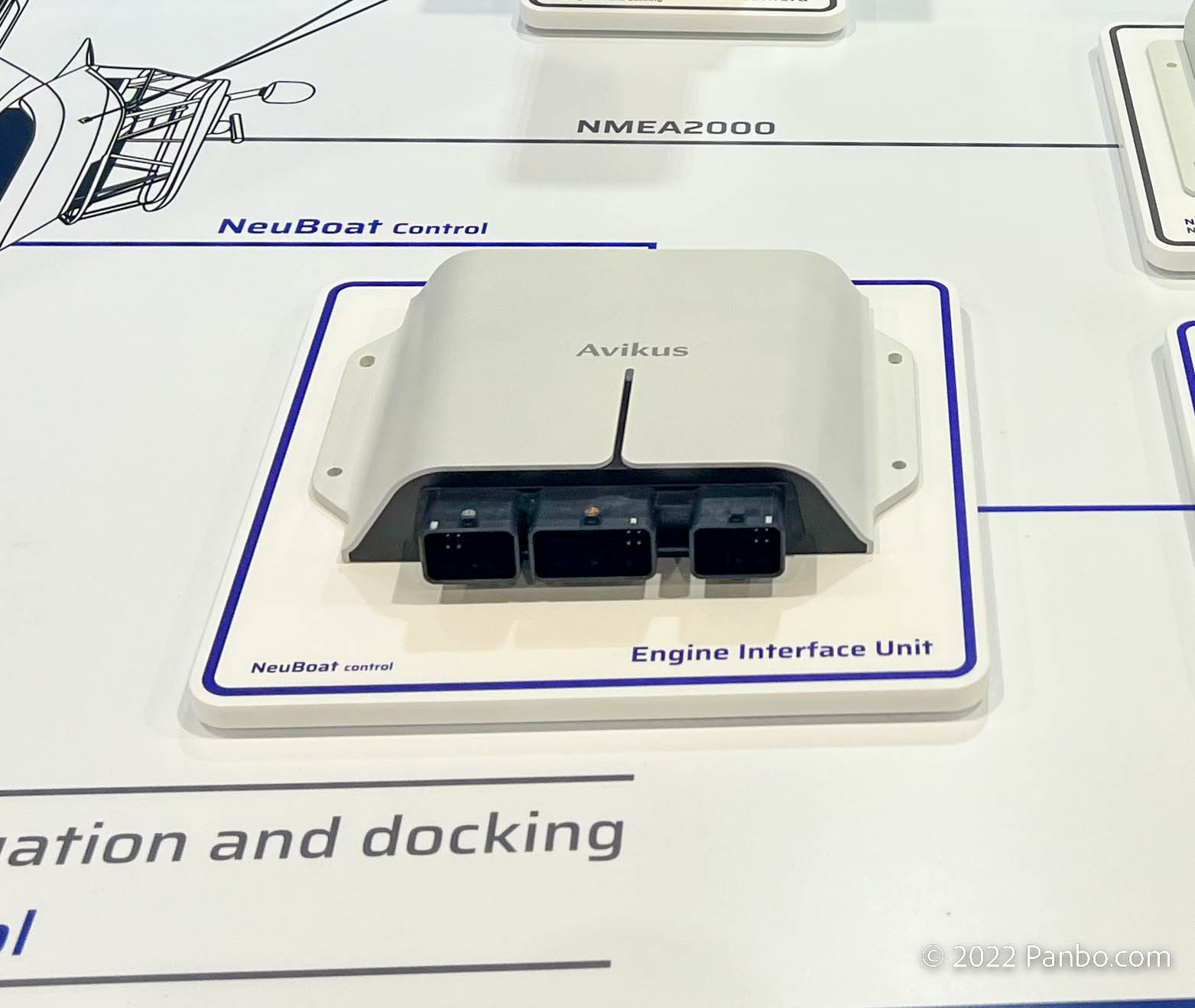

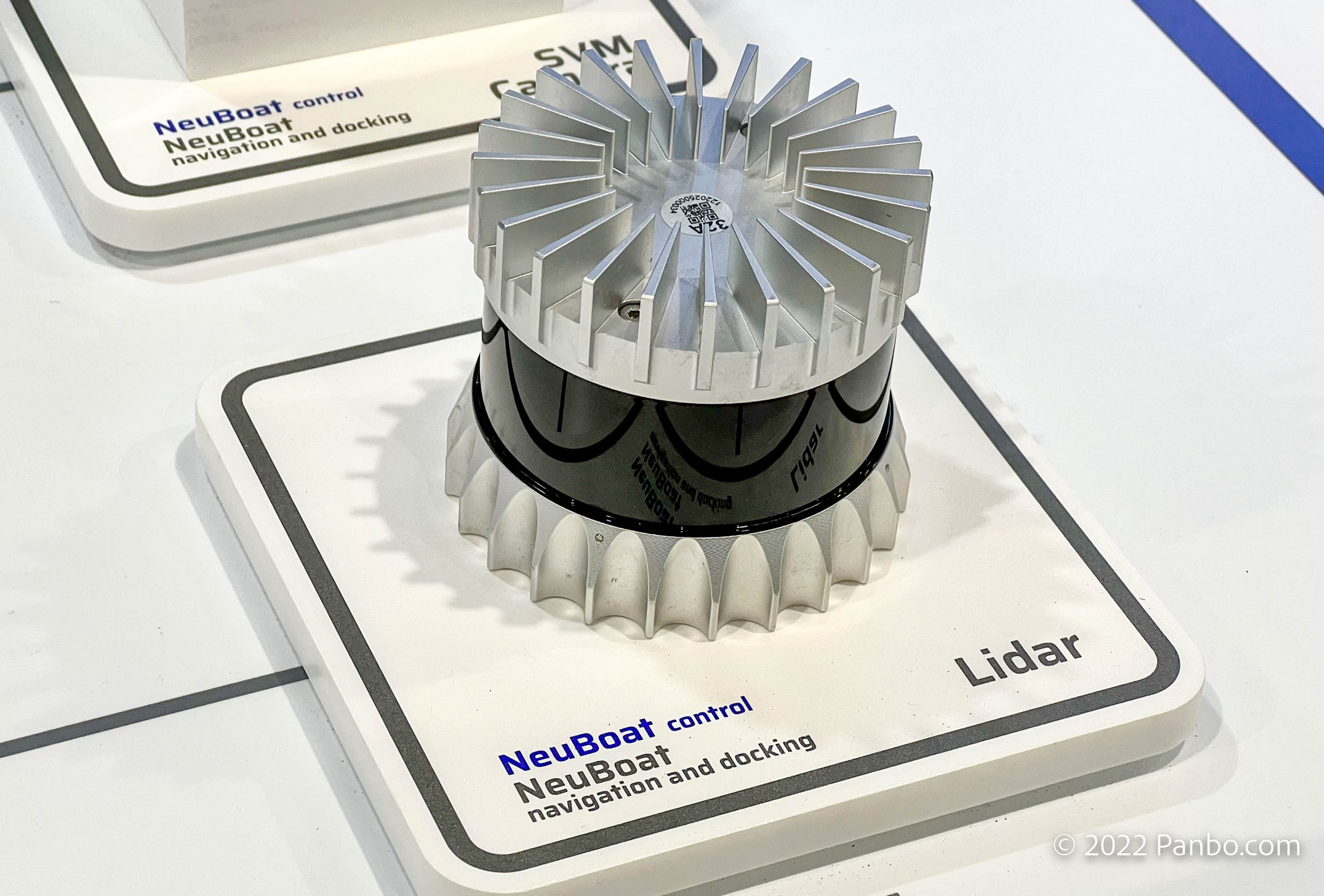
The next option appears shown is NeuBoat Navigation and Docking. Navigation and Docking adds side view cameras and a lidar sensor. Together, they give a 360-degree view of the boat and measure and display the distance to objects around the boat. The last option, NeuBoat Control combines all the sensors and an engine interface unit and autopilot unit to enable the system to take control of the boat’s engines and steering. The lidar unit has a range of 120 meters or roughly 394 feet.

Although our demo boat was equipped with a solid-state radar unit, I’m told radar isn’t yet integrated with the system. I believe this means the range of the system is limited to the just under 400 feet the lidar sensor provides. In high speed boating, I think that would prove problematic. But, I also expect radar integration is coming and will afford the range needed for safe navigation.
Autonomy on the water
My demo ride started in a canal just off the ICW in Fort Lauderdale. Each of us received a tablet in guest mode. Guest mode allowed us to see everything that was happening on the boat and set a route, but none of our inputs would affect the boat. During our demo ride, I saw at least five tablets active on the system simultaneously.
We left the dock with an Avikus representative driving the boat until we got out on the ICW. Once on the ICW, the system took control seamlessly. About the only hint the system is in control is the status indicator in the center top of the tablet that changed to “Route Following.”
As you can see in the demo ride video above, we encountered a crossing scenario with a motor yacht during our demo. It was a borderline situation, but I noticed that boat made a port turn as part of the collision avoidance routine. I asked if the system is COLREGs aware at this time. I understand the system isn’t aware of them yet but they will be incorporated into the AI routines.
Route planning
NeuBoat’s autonomous mode will either follow a defined route or your current heading. In auto heading mode, a heading is established and followed, with corrects made for obstuctions. In route following mode, NeuBoat follows a previously defined route. The video above shows the process of setting a route and having NeuBoat then auto plan that route. I only had a few minutes to experiment with the autorouting, but overall the system looked good. In fact, it seemed to do a better job than most autorouting systems I’ve used avoiding charted, restricted areas.
Auto docking
For many boaters, docking is the most stressful part of a day on the water. So, docking has been the first area we’ve seen tackled by autonomous boating systems. NeuBoat’s autodocking is the most impressive system I’ve seen so far. Enabling auto docking requires an up to date lidar map of the area in which you’re docking. If your manuevers haven’t already given the lidar sensor a good view of the dock, you may need to make a pass for the system to get a clear map. With that lidar map in place, you can enter docking mode by touching where you want to dock. Then, you select a front, rear or side docking direction. With the docking direction selected, you tell the system whether you want a port or starboard tie. With those selections complete, auto docking starts and the system docks the boat.
In contrast to auto docking Volvo Penta’s system, NeuBoat doesn’t require any beacons on the dock, just a survey of the area for the lidar sensor to map it out. Additionally, Avikus says the system doesn’t have a wind, current, or other environmental service ceiling. That’s improtant because you don’t want your auto docking system to leave you when you need it most.
I experienced auto docking on the boat once and watched a few auto docking passes. Overall, I thought the system did an impressive job manuevering, correcting, manuevering some more, correcting some more, and getting in the slip. I suspect an experienced operator may be able to dock a bit more efficiently, but overall the system did an impressive job.
The future
The team I met with was straightforward in explaining the level two autonomy system we experienced is targetted for a 2024 commercial launch. They hope to launch in parternship with boat builders. During the show, Avikus and Raymarine announced a memo of understanding to work together to advance the system and integrate it with Raymarine’s suite of electronics. Avikus appears to be looking for additional partnerships with other electronics companies, engine manufacturers, and boat builders. Given the demo I saw on the water, it looks like they have a lot to bring to any partnership.








Though I’m personally pretty skeptical about the need or desire for fully autonomous recreational boating, it may be telling that Brunswick is putting some of its massive resources into what they call an Advanced Driver Assistance System (ADAS) in partnership with Carnegie Robotics. The prototype system seems to use cameras and LIDAR in similar ways to Avikus, as suggested here:
https://www.youtube.com/watch?v=7zAFNzs3cSE
Also, I discussed ADAS in more detail at the end of this entry about Garmin and Raymarine docking cam systems:
https://panbo.com/integrated-docking-cam-explainer-garmin-surround-view-vs-raymarine-docksense-alert/
Speaking of advanced collision-avoidance electronics, today SEA.AI announced that half the foiling Ultim and IMOCA racers in the singlehanded Route Du Rhum transatlantic will be equipped with their masthead object-detecting camera systems (originally called OSCAR). Note the bit about eventual autopilot integration at the end of the press release:
https://mailchi.mp/a17b5a7ce39e/taking-machine-vision-offshore
As a tech dude, I find this fascinating. I would imagine some parts of this technology could make it into recreational boating to the benefit of all. As a system, however, I would think this takes much of the recreation out of recreational boating.
Agreed. Maybe Brunswick thinks they can sell more boats by marketing them as “So easy, a caveman can do it…”, but not for me. I’ve seen too many systems that work great…. until they don’t. Then its up to the human to handle it. Oh, you’ve never learned how? Gee, that’s too bad……crunch.
I too am skeptical about the need for and wisdom of autonomous recreational boats.
I am however, interested in better info provided to the skipper. I think that something like the Raymarine ClearCruise AR system might represent the current sweetspot given costs and current technology.
I do think that there may be a larger market for this than one might think. I can’t imagine being without my autopilot – it drives 90% of the time. This seems to be a natural step from an autopilot.
But while I will never envision owning a boat with this technology, I sure would be glad that the boaters that have no concept of the rules of operating a vessel have and use this equipment on their boats.