
Maretron FFM100 fuel flow monitor test (part 1), as good as it gets?
 When I first wrote about Maretron’s FFM100 fuel flow monitor, I was enthused about both its advanced sensor technology and the possibilities of a system designed from the ground up for NMEA 2000. Now that I’ve installed the system on Gizmo and tested it a bit underway (before the weather closed in), I’m even more impressed. But I have also learned how difficult it can be to accurately measure how much fuel a diesel actually uses in real time…
When I first wrote about Maretron’s FFM100 fuel flow monitor, I was enthused about both its advanced sensor technology and the possibilities of a system designed from the ground up for NMEA 2000. Now that I’ve installed the system on Gizmo and tested it a bit underway (before the weather closed in), I’m even more impressed. But I have also learned how difficult it can be to accurately measure how much fuel a diesel actually uses in real time…
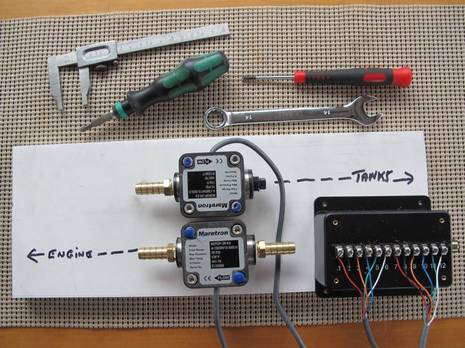
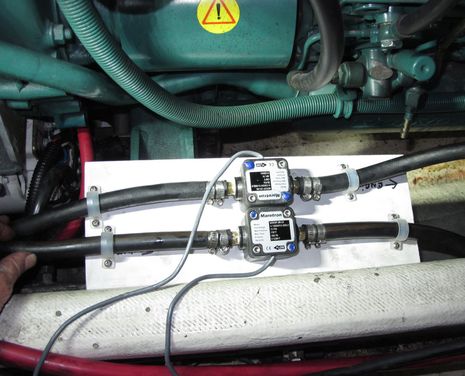 I was apprehensive about cutting the fuel lines to Gizmo’s one and only engine, but in fact the hardware install was quite straightforward. The flow meters themselves are small and there’s no need for in-fuel-line accessories like return coolers or pulsation dampers. But you are required to mount the sensors so that their twin “positive displacement” volume measuring rotors — as opposed to a flow speed measuring inline turbine — have their shafts parallel to the water surface (manuals here). Thus that white Azek PVC board ended up screwed to the inside surface of the engine stringer.
I was apprehensive about cutting the fuel lines to Gizmo’s one and only engine, but in fact the hardware install was quite straightforward. The flow meters themselves are small and there’s no need for in-fuel-line accessories like return coolers or pulsation dampers. But you are required to mount the sensors so that their twin “positive displacement” volume measuring rotors — as opposed to a flow speed measuring inline turbine — have their shafts parallel to the water surface (manuals here). Thus that white Azek PVC board ended up screwed to the inside surface of the engine stringer.
I also had to source the nipples (from Racor) and I wished the sensors were surface mounted instead of being bolted from behind, but those are trivial issues for the pros who would normally do this sort of install. In fact, some Wayfarer Marine techs checked out my finished setup and seemed quite impressed with Maretron’s simple and compact system design.
 One interesting feature of the FFM100 black box is that it can handle the two flow sensors in independent or differential modes. So what you’re seeing in the two top data boxes above are the independent fuel flows into and out of my 450 horsepower Volvo Penta, and — HOLY COW! — look how much diesel is running through even at dead idle – 567 RPM (and no load)! Maretron carefully warns that while an independent meter is accurate to about 0.25%, diesel differential mode adds a significant error factor.
One interesting feature of the FFM100 black box is that it can handle the two flow sensors in independent or differential modes. So what you’re seeing in the two top data boxes above are the independent fuel flows into and out of my 450 horsepower Volvo Penta, and — HOLY COW! — look how much diesel is running through even at dead idle – 567 RPM (and no load)! Maretron carefully warns that while an independent meter is accurate to about 0.25%, diesel differential mode adds a significant error factor.
You can probably intuit the problem from the screen above, though a video would be better as you’d see how the flow rate numbers “jiggle” (even nearly 30 gallons an hour or 0.5 a minute is hard to measure consistently in two second intervals). Consider that what you’re really trying to measure is the approximately 0.7 gallon actually being burned, and you realize even tiny errors in or out get badly compounded in this situation. Maretron estimates that most diesels only burn 25% of the fuel supplied — which seems about right given that my preliminary max speed rate is about 19 of the 53 gallons coming through (ouch) — but the idle burn percentage shown above is about 2%.
I don’t know if other engines are like mine at low RPMs, and as I’ll discuss further down, I’m pretty sure that the Maretron system is doing well even with what may be its extremes, but doesn’t this illustrate how difficult it is to measure diesel fuel burn rates? On the other hand, I was also pleased to learn that even at low speeds Gizmo’s fuel is being run through the filters at a fairly high rate, and I’ve already used independent mode’s Trip Fuel Used to perfect my technique of trimming ship by using the fuel return valve to move diesel from one tank to the other.
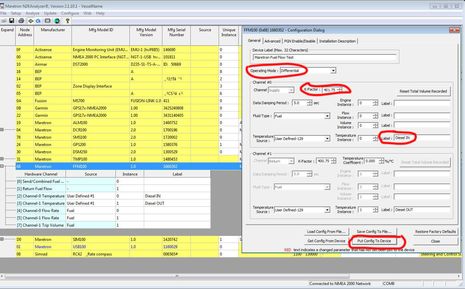 Above is a Maretron N2Kanalyzer screen showing FFM100 calibration details, all of which you can also do on a DSM250 or 150 display, though not as easily. Because there’s a lot going on even if you click it bigger, I highlighted several areas of note. The first is where I’ve switched from independent to differential mode, which is why many of the Channel #1 values are grayed out; the FFM is taking in the measurements of two sensors but outputting only one flow value. (Incidentally, this same hardware setup could measure fuel flow for two large outboards and has a retail cost of $1,385 for the mid-size sensors. Maretron has various well documented FFM system examples here.)
Above is a Maretron N2Kanalyzer screen showing FFM100 calibration details, all of which you can also do on a DSM250 or 150 display, though not as easily. Because there’s a lot going on even if you click it bigger, I highlighted several areas of note. The first is where I’ve switched from independent to differential mode, which is why many of the Channel #1 values are grayed out; the FFM is taking in the measurements of two sensors but outputting only one flow value. (Incidentally, this same hardware setup could measure fuel flow for two large outboards and has a retail cost of $1,385 for the mid-size sensors. Maretron has various well documented FFM system examples here.)
The second highlight is a bit of magic called the K-Factor. I don’t know what the “K” means, but Maretron puts every sensor through an actual flow test and prints a calibration factor on its label (and if yours truly had read the manual about inputting the K-Factor during installation, I’d already have more valid testing data to share :-). Highlights 3 and 4 are somewhat extraneous but suggest how a label typed into the configuration can be useful elsewhere once you “put config to device”…
 When I slapped together a DSM250 screen to illustrate the FFM100’s ability to also measure fuel temperature, those labels were quickly available even though the PC was shut down (a nifty feature throughout the Maretron line). In fact, I think I’ve already changed that screen again because I can’t think of why I’d want to know fuel temps. The real point is that though fuel volume and hence, measured flow changes with temperature, the FMM100 can and does correct for the differences. And I guess the screen also shows that fuel economy — the precious calculation of differential flow versus SOG or STW (speed through the water) — is zero when the boat is tied up.
When I slapped together a DSM250 screen to illustrate the FFM100’s ability to also measure fuel temperature, those labels were quickly available even though the PC was shut down (a nifty feature throughout the Maretron line). In fact, I think I’ve already changed that screen again because I can’t think of why I’d want to know fuel temps. The real point is that though fuel volume and hence, measured flow changes with temperature, the FMM100 can and does correct for the differences. And I guess the screen also shows that fuel economy — the precious calculation of differential flow versus SOG or STW (speed through the water) — is zero when the boat is tied up.
 Finally, though not surprising, it was nice to see the FFM’s flow values show up on various NMEA 2000 displays around the boat, including the Garmin 741 above (which just got an amazing software update). As with the Actisense EMU-1 that’s getting that RPM value out of my mostly analog engine, I’m becoming persnickety about virtual gauges. For instance, I’d like more tick marks on that gal/hour dial to the right (which is why I had its range set to less than Gizmo’s WOT burn). But serious display testing will have to wait until spring, as will any further efforts to figure out if the FFM100 is truly accurate.
Finally, though not surprising, it was nice to see the FFM’s flow values show up on various NMEA 2000 displays around the boat, including the Garmin 741 above (which just got an amazing software update). As with the Actisense EMU-1 that’s getting that RPM value out of my mostly analog engine, I’m becoming persnickety about virtual gauges. For instance, I’d like more tick marks on that gal/hour dial to the right (which is why I had its range set to less than Gizmo’s WOT burn). But serious display testing will have to wait until spring, as will any further efforts to figure out if the FFM100 is truly accurate.
I did get in one test trip after I applied the K-Factor, and the general results were surprisingly close to the numbers collected when Pat Ricci plugged his special Volvo Penta software into my ECU while we ran RPM scales. I published that graph when first discussing the Maretron FFM100 (and also the uncertainty of engine generated flow rates). But there were unfortunate aspects to the November trip – it was rough, the flow and economy numbers were jumping around, and I was alone. The results were just preliminary, but I did notice how the miles/gal changed depending on Gizmo’s relationship to wind and wave, which is just the sort of info that can make the system worthwhile.
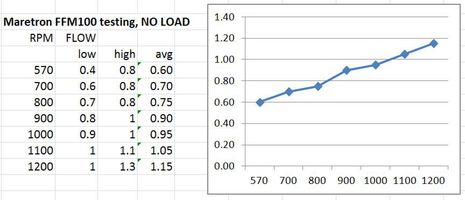
And just before hauling the boat I realized I could get easier to record and quantify results by setting the data dampening period to 5 seconds (see config screen), which I tried out at the dock. I believe that one of the first things experts look for in instrumentation is linearity, and isn’t that pretty darn good linearity shown in the graph below. It’s a limited sample, but it’s also in the range where the FFM is trying to measure a tiny fraction of the fuel both sensors are seeing. I’m looking forward to spring testing of course, but maybe as much to sharing some major Maretron product news in a day or two.








Some readers might enjoy some more detail on Gizmo’s tank system. I don’t know if it was genius design or happenstance, but the layout works nicely:
The boat has twin 150 gallon fuel tanks which are way outboard port and starboard close to midships. The 100 gallon water tank is slightly forward and on center line under the galley sole and the 50 gallon holding tank is hard to starboard just ahead of one fuel tank.
At any rate, with a starboard lower helm, side door, and rail gate, Gizmo much prefers to tie up on that side, which is also the location of one fuel fill and the pump-out port. So it’s a natural to use starboard as the primary fuel tank, and if the cruise has a reasonable balance of liveaboard activities and fuel burn the boat stays in trim. A quick stop at a marina to replace the fuel and get a pump out and she’s still in trim 😉
Of course there are many other factors and scenarios, and while I wouldn’t want those big fuel tanks anywhere else, they can severely affect side-to-side trim if not managed well. That’s been one benefit of the improved tank level monitoring I got by using the BEP CZone analog Signal Interface with the existing sensors ( http://goo.gl/rPPeu2 )
And as mentioned in the entry it’s a side benefit of the new fuel flow system. I think that with a little more time in Independent mode I can develop a rudimentary table showing x time at y rpms moves z gallons from tank to tank.
However, seeing 26 gallons of diesel oil passing through my system at idle is a reminder about how careful I should be. I usually stick a post-it by the engine controls when I have one tank set to supply and the other to return but I might upgrade to red ribbon tied to the throttle/shift lever. Or maybe I can set up high level alarms on the fuel tanks?
Ben we have the same installation on our boat, Ocean Alexander 50 footer with two cat engines. We also use the same display that you have. We love it it has paid for itself by knowing the sweet spot to run the boat. We also had to make some special brackets to install the parts. Furuno Nav Net Chart plotter also displays fuel usage. Good article thanks
Good to reed this.
Want to move from Floscan 95000 to Flonet, but the n2k gateway is very expensive.
So I guess moving to Maretron is als so as good.
Or try to get a Floscan 80000 Gauge with pulse output to feed my Actisense EMU-1.
Anybody beter or more suggestions?
I had an older Navman fuel flow sensor and Navman chart plotter in my previous boat. I quickly found out that a fuel economy readout was a great tool for determining the best power setting vs. trim tab setting on a planing hull boat.
I would bring the boat up to cruising speed. Then I would change the trim and/or the throttle settings in small increments while watching the fuel economy. Once I got it to the maximum nm/gal for a given speed I’d leave it there. I also discovered that the optimum setting for a given speed varied with wave conditions.
Incidentally, I’ve been lobbying Maretron for a “Money Meter” and I think the they might do it. The user would have to enter the cost per gallon for diesel or gasoline whenever you fill up but then the meter could deliver dollars per mile, per hour, or maybe even to destination at current burn rate. Would you want to know?
You could easily do this with a SignalK Gateway
Thanks, James. Is their a particular Signal K app that could be used?
Node-Red, you can take any data add some logic and report back the data. You might need some logic for smoothing it out and how you want it displayed. Do you want $ per hour?
Just wondering if they make sensors that are optimized for the much lower fuel flow of sailboat engines? (Well, at least the differential flow would be smaller, I have no idea what the max flow would be.) The Yanmar 4JH2DTE turbo diesel on ATSA consumes about 1.5 gal/hr at 2500 rpm cruise, a far cry from what you see on GIZMO. What I really want is a good idea of total burn – I have a gauge, but its more of a very rough approximation than I’d like.
I wonder if it would be possible to construct a sensor that could meter true differential flow somehow? (I’m not a hydraulic engineer, but I bet there are some on Panbo..:-)
I used to have a Volvo Penta MD11 in my boat which was a diesel engine with an integrated fuel return. Instead of returning unused diesel back to the tank it returned directly to the primary fuel pump on the engine. I wonder why that design went away? It would make fuel measurement on diesels much simpler.
Anyway …
My approach to getting accurate fuel usage on a sailboat would be to use a capacitive tank level meter on a small day tank (less than a gallon, perhaps an hour tank?) with the fuel flow sensor between the main tank and the day tank. The level meter doesn’t need to be accurate, as long as it can indicate “low” and “full” states for the tank.
Engine fuel intake and return are connected to the day tank.
The level sensor is responsible for triggering the pump (“low” turns pump on, “high” turns pump off) which fills the day tank. Now, you don’t care about the flow rate through the sensor directly, it only matters for calculating how much fuel is pumped in to the day tank. The number you need is the amount of fuel pumped in to the day tank divided by number of minutes since fuel was last pumped in or since the engine was started (assume we always start with a full day tank).
This device I describe could be packaged in to a single unit by Maretron for sailboats and I think would be more accurate than using two sensors. (Maretron: if you make this, I’ll beta-test it).
It seems to me that the accuracy would be better if both sensors were packaged into a single unit. The unit would then do the differential calculation locally and could filter out some of the jitter that you see on your display.
Then again, the current setup probably works well for a first product and if there is demand they can integrate the unit.
The manual say’s that the sensors should be level with the water.
I alway’s have a tilt of at least 6 to 10 degrees according to my GS25 GPS on cruise.
So that rules maretron out?
Tim, I fear I may have confused you. The Maretron sensors are supposed to be extremely accurate, used independently or differentially, and each one is tested and given a calibration value before shipped. And I have not yet seen any results that suggest the sensors aren’t dead on. When I get to the point of comparing a tank fill with the total number of burnt gallons counted by this system, I expect the numbers will be very close.
But accurately measuring fluid flow in “real time” is quite different than doing it over minutes, hours, and days. Even with gas engines I think that users will see more realistic and consistent real time numbers with longer dampening periods, and with a diesel — especially one like mine — that’s especially true.
The good news, I think, is that on boats “real time” doesn’t have to be instantaneous. I’ll be quite happy if the FFM100 can give me solid low RPM flow data for 10 or 30 seconds, or even a minute, if that’s what it takes to average out the noise.
As for small sail boat diesels, I know no reason by Maretron’s M1RSP sensors won’t work fine. They are rated for a flow range of 0.53 to 26.4 GPH and I doubt that even the smallest marine diesels have a return flow of less than half a gallon an hour (the return is the smallest value the sensors actually measure since the ‘supply’ side = return and burn).
I also doubt there’s any real issue with sailboat heel when motor sailing, if that’s what Hendrik means. I think that instruction to mount the sensors with their rotor shafts parallel to water or ground surface is mainly about maximizing the lifetime of the various bearing surfaces. But I will ask Maretron to double check my comments 😉
Andy, just saw your comment. Adding to what I just wrote to Tim, I don’t think making a differential fuel flow system as one unit would make it any more accurate, not even a little. It would still be doing exactly what the Maretron system is doing, and I think the Maretron is very accurate. It’s just instantaneous measurement that is an issue here.
Money Meter?
A great idea, especially if it can be integrated with the chart plotter tidal current database. Imagine what the cost extremes (good and bad) might be for, say an OA 50, on a run from Olympia, Washington to Port Townsend, WA. If you depart at the right time and cruise at the right speed you can probably save a bundle.
No I don’t mean the roll (angle of heel) but the pitch ( from front to back).
Anyway, nice of you thatt you’ll ask Maretron for me Ben.
thanks!
Hendrik, Maretron confirmed that the recommended fuel sensor alignment is about giving the rotors an optimal working environment. Obviously rolling, pitching, and heeling are expected on a boat.
Maretron also confirmed that low dampening periods can result in very jumpy real timeflow readings. In fact, since they can measure flow in either direction and there is a certain amount of pulsation in many fuel systems, it can look for an instance as though your engine is making fuel. More dampening equals greater accuracy.
Thanks,
So that makes Maretron an equal good or better device as the Flonet in my opinion.
And the European price seems fair to the US price on the Maretron side.
Flonet is way off in that respect at the moment.
Ben.
I cannot see your ‘plumbing’ diagram but the termination identities are incomplete and possibly confusing and your system may not be entirely valid. Surely the one sensor senses fuel flow into the engine and the other sensor fuel flow in the ‘fuel return’ line from the pump/distributor. The tank plumbing must incorporate independent outlet source and return inlet plumbing.
Regards & thanks to Panbo for it’s phenomenal contribution to the readership worldwide,
Ben,
I think the money meter would be incredibly brutal. Even fuel misers could induce serious depression if such a monitor were available.
Glad to see Maretron has now allowed metal fuel fittings on their meters. Early versions clearly stated that plastic fittings were required…..in violation of ABYC.
All the best!
Thanks, millsiteman, and sorry I wasn’t more specific about the plumbing. But it is valid, and quite conventional. I installed the supply side sensor in the line between the boat’s primary dual Racor filters and the engine (and there’s a Y valve between the Racors and the tanks). The return sensor is in the line between the engine and another Y valve that let’s you choose which tank to send fuel back to. That’s it.
Don, I think it would be interesting to see how different boaters used the “money meter” and never using it would probably be one popular option! On the other hand there would be those who enjoyed showing off how much money they were burning; we are a diverse community 😉
You bring up a good point about the non metallic sensor body. The install cautions are somewhat worrisome as in
“Extreme care must be taken when installing the sensor. Pipe strain or over tightening pipe connections can cause sensor damage.” etc.
I think I did it correctly, I’ve already seen it work fine at wide open throttle, I will continue to keep an eye on them, and I take some comfort in the fact that quite a few of these sensors have already been installed for a while.
Tks Ben,
I was really aiming at the point of return to the tanks and within the tanks themselves as I was under the impression that return fuel could not be returned into the body of fuel itself but into the air gap above fuel level via a U tube configuration. This has been in my mind for some time and I cannot remember from whence it came!
Regds John.
John, Here’s a very detailed PassageMaker article about marine diesel tanks:
http://www.passagemaker.com/articles/technical/fuel-systems-technical/diesel-fuel-tank-design/
A return tube inside the tank like the pickup tube is apparently required or highly recommended by author Steve D’Antonio. The reason is to avoid aerating the fuel by just splashing the return into the top of the tank.
But we’ve gotten far afield here. Tank plumbing has nothing to do with measuring fuel flow. My install did not change the plumbing in any way, nor do the sensors change the flow. All the fuel that’s burned and returned runs through one line, all that isn’t burned runs through the other. Both have flow sensors. It’s really that simple.
Ben,
Am aware of the theory. principles and practical implementation but you are the man with the problem(?) and strange readings. I will await your diagnosis with interest. You could start by testing each line independently although it would be tedious reconfiguring the system several times over.
Regds John.
Well, there’s the misunderstanding, John. I don’t have a problem that needs further diagnosis. “Jumpy” realtime fuel flow readings are not strange when you understand how difficult the instantaneous measurements are, especially when the diesel fuel burn is a very small percentage of the overall flow. That’s the testing lesson I tried to explain above.
What I further learned was that dampening the realtime results makes them more usable and actually more accurate. The last illustration in the entry shows the range of readings I saw at low RPMs no load with a 5 second dampening period. When averaged and graphed they make a lot of sense. I look forward to trying longer dampening periods (which I’ve learned I can configure on the FMM100 by typing in the value).
I also look forward to testing the claimed accuracy of the Maretron meters over time. At about 0.25% for an individual sensor with a combined inaccuracy that might push 2% given the issue of differential calculation with high return flow, that would still be only 2 gallons per 100. The ultimate test, though, is getting actionable information about sweet running spots in different weather and boat conditions, and I’m already fairly confidant that I will see that.
Interesting side note: I was disappointed that my relatively new and tricked-out Ford Escape only shows average fuel economy, not realtime numbers. But now I realize that the realtime value may be impossible to properly calculate in an automobile because the dampening period needed to show reasonable numbers would also mask rapid acceleration, steep hills etc. Once again boaters luck out 😉
I have had that same disappointment with rental Fords, however it is possible. VW diesels do an excellent job of reporting real-time mileage (dampened only a few seconds). It even shows fuel burn when the car is not moving. You can see what it takes to idle and what it takes to go up steep hills.
Regarding the orientation of the sensors, Maretron shows pictures but doesn’t indicate which way is up. I think they are trying to say that wall mount is okay and floor mount is not.
I’ll agree with Norse here – the instructions are badly written at best, and a complete confusion at worst.
Here’s what it says: “The fuel flow sensor must be mounted so that these rotor shafts are always in a horizontal plane (parallel with the ground or water surface). The rotor shafts are parallel to the four screws attaching the sensor cap to the sensor base, so ensure that these screws are in a horizontal plane.”
By my reading, you have yours mounted 90 degrees out (either that or your board is really vertical – it’s hard to tell).
🙂
Thought is was my bad understanding of the english language
I did read those sensor install instructions a few times, but now it seems fairly obvious. Most everything in the sensor is parallel to eachother — the machine screws on top, the mounted screws behind, and the rotor shafts.
So, yes, as mentioned in the entry, the Azek board I mounted the sensors on is now fastened to the inside face of the port engine stringer, which might be considered a ‘wall’. I took the second install photo before turning the board 90 degrees (where you can’t see it without a mirror, like the one I use to assure myself that there are no leaks). ‘Ceiling’ or ‘floor’ mounts are perfectly possible but you’ll need an ‘L’ bracket.
As for any vehicle or engine with built-in fuel flow measurement, remember that what you see may not be actual flow at all but instead a figure derived from other engine measurements like load and RPM, or a real flow ‘measurement’ that’s significantly smoothed or otherwise modified to account for the difficulty of true realtime measurement.
Ahh – OK, that makes more sense – I hadn’t realized you picture wasn’t the final position..;-). I still think they could have put an actual picture in the instructions that would have made it much clearer (I suspect they intended to, based on the words they used, but it somehow got left out).
I haven’t actually done it but I did imagine this easy way to visualize the real-time fuel flow problem:
Get a one gallon jug and try to adjust your kitchen faucet to a flow rate that takes 15 minutes to fill the jug. That’s four gallons per hour, which is the minimum limit of my mid-size Maretron flow sensors. It’s also the flow rate of a gasoline vehicle going 60 mph with the poor fuel economy rate of 15 mpg, or an outboard going 30 knots at 7.5 nm per gallon.
I’m pretty sure that 4 gallons an hour from a faucet looks a lot like a fast drip. I think it’s fairly amazing that a mechanical sensor can accurately measure that volume over an hour. But I can also picture how it’s virtually impossible to consistently measure that slight flow rate on a second to second basis.
Ben,
Have enjoyed these postings and have perhaps overlooked the fact that GIZMO is in fact a floating laboratory of a most demanding environment and nature. The beauty is that it is all hung out for everyone to see. The comments show that amongst your audience there is a sizeable body of knowledge and experience who have keen eyes for detail and probably wish they could be the the nautical ‘mad scientist’,’ chief engineer’ or ‘Senior Commodore’, and some probably are!
Ben: Good article.
I just finished installing the Maretron system in my twin engine trawler. The main reason for buying it was to know exactly how much fuel I have used since last topoff. The fuel economy display was secondary.
There was some confusion when ordering parts with Maretron’s mini, mid, and micro designations. Installation was easy. Also some confusion with Maretron’s “instance” and “source” designation with two engines and four flow sensors.
Nice not having to go through the calibration routine that Floscan requires. – See more at: https://panbo.com/cgi-bin/admin/g1RkyB5aIr0_rFiG2sE5tg-cAm3nR5u7ts.cgi#sthash.EcZjveDu.dpuf
Very good article, thank you! Unfortunately there are other experiences…
I got 4 M4ARP-2R-E8 sensors from Maretron plus a DSM250 display in May 2012.
While the installation was very easy, the setup have been much more complicated.
First, it turned out that the DSM250 wasn’t able to set the sensors as the soft was not updated for them. The contrary of what was said in their commercials. Maretron suggested me to buy an USB100 for just that, updating the DSM250… Yes, easy. For them and for their bank account!
The included software was quite lousy, and I never been able to get a correct setup of the sensors (impossible to enter the K factor correctly, erratic values recorded, etc.) until… April this year, when they finaly released a soft upgrade for the FFM100.
I played with it last week, but again, new disappointment. I found Maretron enginering quite poor on the software side and dead slow on the update side. Some of the bugs noticed in 2012 are still present, on both, the PC interface and the DSM250…
Ie: the % of luminosity: If you choose 1% of luminosity, the true luminosity will not be the same if you scroll down from 50% to 1% than if you scroll up from the same 50% to 1%…
Further more, their interfaces talk poorly in between each others and create confusion where you would appreciate certitude.
As an exemple, try to enter a dampening value for the FFM100 through their PC software and “save it to the sensor”. Now, go to the DSM250 interface, choose the configuration menu and read: the dampening value is different than the one the PC interface you entered and saved 5mn ago…
As well I updated the firmware on both FFM100 interfaces but only one want to accept the correct K value. And this number is important: a slight 0.01 difference and you have a incoherent final reading. Same for the temperature correction. Etc.
As today, I have 2 identical engines (with following serial numbers) with the double consumption on port, compare to starboard, at exactly the same load and rpm…
To temper this, I have to say that I have Deutz engines which have a high flow (around 100 gallons per hour for only 140hp) so the calculation is probably very close to the error margin.
Anyway, after 2 years, these Maretron FFM100 still don’t work and I lost confidence in Maretron capacity in producing good quality soft. And I don’t even want to talk about the design. I have the feeling to be back to a Windows 3.11 era.
Pierre,
I am stunned by your experiences which are so different from that of myself and others.
I admit having the Actisense unit on which the USB100 is based, and perhaps that made all the difference. Nonetheless, have you ruled out the possibility of a self-inflicted experience? I hope you have better experiences with the flow sensors in the future!
Cheers
Don
Don,
thank you for your reply/comment.
Unfortunately, I stand on it, the software side of Maretron production is not very good. And I carefully checked all the possible points of the physical components install which could be wrong. I had time in 2 years I was waiting for a soft/firmware upgrade…
On their last technical bulletin dedicate to the FFM100, they state that they corrected the issue of the K factor. The 2 FFM100 I have were updated, and various times last week. But on one of them, I still can’t enter the K factor correctly… One on two, it’s not bad!
When I put the correct number to the device, it says “the modification have been put to the device successfully”. And then, if I relaunch the window for modification to the device, then it’s an other number which show up.
Anyway, I am not here to trouble-checking these unit, just to voice a different experience with Maretron products.
It also could turn out that their high flow sensors are not very well managed. These are probably the ones their sell the less? It seems they applied the same basic logic for all engines, low or high flow system (some engines use the fuel to cool down the engine and filter more frequently the diesel). Mines are medium pressure (7 bars) in the fuel line. And, while their sensors works well individually (I checked and compared the readings one by one), the calculation and the way to correct the readings don’t.
They should offer a list of engines compatibility, with tested and validated ones?
It’s a suggestion and I am sure they ready your blog!
Mines are Deutz Marine BF4M1013
These engines are quite often used for medium size generators as well.
Reliable. I already done 4 Atlantic xing with them. I have a good idea what they burn per NM.
On an other hand, I found the Swiss company Aquametro for fuel sensor. Their products seems to be more of a professional grade.
http://www.aquametro.com/english/prod_oel_e.html
As I have already lost a good amount of $$$ playing with fuel sensors, I better find a top notch system to try to regain them!
Thanks again for your pasionating blog.
Pierre,
I am sorry that you are having problems with the Maretron equipment. Please give us a call and we will see if we can get it straightened out.
(866) 550-9100
hi
I would like to install this system to my engines VM 494 HID10 140 hp.
I saw that there are sensors with different characteristics.
What sensors do you recommend for my engine?
From Review today someone has installed the system?
There are additional feedback?
thanks
Hi Marco, I have now tested the accuracy of the Maretron fuel flow sensors and it’s impressive. The real time miles per gallon numbers are useful and the running count of fuel used over time is dead accurate:
https://panbo.com/archives/2014/09/appreciating_fuel_management_wanting_more.html
I did have a problem with diesel weeping from one of the sensors, possibly because the composite casing developed a hair line crack, but Maretron has switched to metal-bodied sensors.
To figure out which sensor size is correct, see if your engine manual lists the range of total fuel thruput. It’s not what your engine burns but rather the total gallons per hour it pumps through (much of which gets sent back to the tank). Maretron may be able to help.
Found reading this article very interesting Ben as I am considering installing this system on my 36ft 190hp Displacement Launch “Aftershock” which I have just recently launched following a 42 month build. In NZ the big issue is the programme part of the K value as you really need the DSM250 for this I understand although I think I have found someone in NZ who is able to Pre-programme the unit for me. I will display through my Garmin 5212. Stuart